


As large language models such as GPT-4 are increasingly integrated with robotics, artificial intelligence is gradually moving into the real world. Therefore, research related to embodied intelligence has also attracted more and more attention. Among many research projects, Google's "RT" series of robots have always been at the forefront, and this trend has begun to accelerate recently (see "Large Models Are Reconstructing Robots, How Google Deepmind Defines Embodied Intelligence in the Future" for details).
In July last year, Google DeepMind launched RT-2, which is the world’s first robot capable of controlling vision-language-action (VLA). ) interaction model. Just by giving instructions in a conversational way, RT-2 can identify Swift in a large number of pictures and deliver a can of Coke to her.
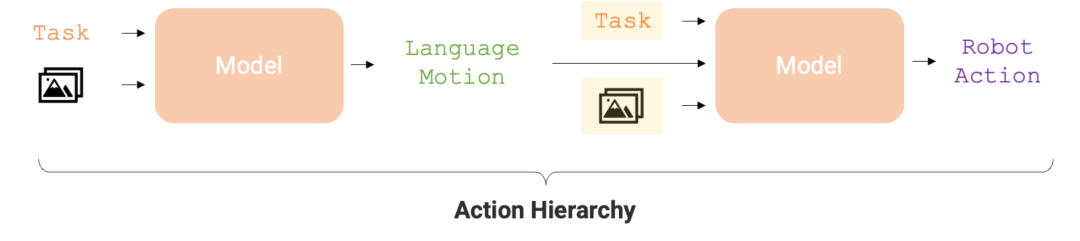
Now, this robot has evolved again. The latest version of the RT robot is called "RT-H". It can improve the accuracy of task execution and learning efficiency by decomposing complex tasks into simple language instructions and then converting these instructions into robot actions. For example, given a task, such as "putting the lid on the pistachio jar" and a scene image, RT-H will use a visual language model (VLM) to predict language actions (motion), such as "move the arm forward" and "Rotate the arm to the right", and then predict the robot's action based on these verbal actions.

The action hierarchy is critical to optimizing the accuracy and learning efficiency of robot task execution. This hierarchical structure makes RT-H perform significantly better than RT-2 in various robot tasks, providing a more efficient execution path for the robot.
The following are the details of the paper.
Language is the engine of human reasoning that allows us to break down complex concepts into simpler components, correct our misunderstandings, and generalize concepts in new contexts. In recent years, robots have also begun to use the efficient and combined structure of language to break down high-level concepts, provide language correction, or achieve generalization in new environments.
These studies usually follow a common paradigm: faced with a high-level task described in language (such as "pick up the Coke can"), they learn to combine observations with the task description in language Mapping policies to low-level robot actions, which requires large-scale multi-task datasets. The advantage of language in these scenarios is that it encodes shared structure between similar tasks (e.g., "pick up the Coke can" versus "pick up the apple"), thereby reducing the data required to learn mappings from tasks to actions. However, as tasks become more diverse, the language used to describe each task also becomes more diverse (e.g., “pick up a Coke can” versus “fill a glass of water”), making learning between different tasks solely through high-level language It becomes more difficult to share structures between
To learn diverse tasks, researchers aim to more accurately capture the similarities between these tasks.
They found that language can not only describe high-level tasks, but also explain in detail how to complete the tasks - this kind of representation is more delicate and closer to specific actions. For example, the task of "picking up a Coke can" can be broken down into a series of more detailed steps, namely "language motion": first "reaching the arm forward", then "grasping the can", and finally "raising the arm upward" ”. The core insight of the researchers is that by using verbal actions as an intermediate layer connecting high-level task descriptions and low-level actions, they can be used to build an action hierarchy formed by verbal actions.
There are several advantages to establishing this level of action:
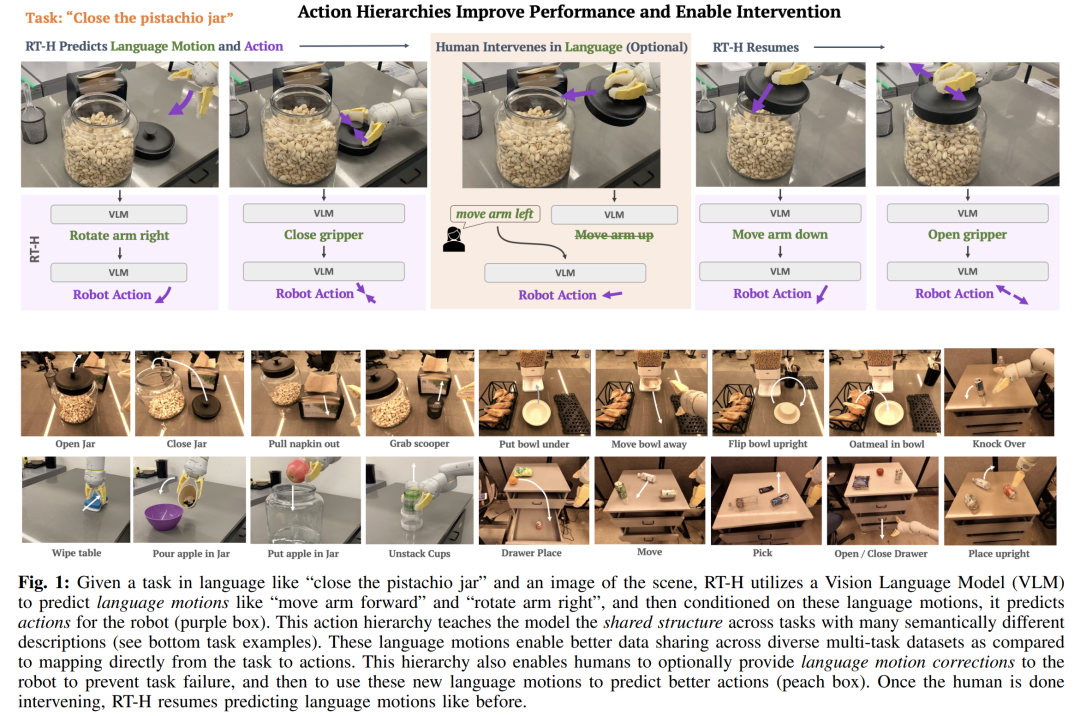
In view of the above advantages of language actions, researchers from Google DeepMind designed an end-to-end framework - RT-H ( Robot Transformer with Action Hierarchies, that is, a robot Transformer that uses action levels, focuses on learning this type of action level. RT-H understands how to perform a task at a detailed level by analyzing observations and high-level task descriptions to predict current verbal action instructions. Then, using these observations, tasks, and inferred verbal actions, RT-H predicts the corresponding actions for each step. The verbal actions provide additional context in the process to help predict specific actions more accurately (purple area in Figure 1) .
In addition, they developed an automated method to extract simplified language action sets from the robot's proprioception, building a rich database of more than 2,500 language actions without the need for manual Label.
RT-H’s model architecture draws on RT-2, which is a large-scale visual language model (VLM) jointly trained on Internet-scale visual and language data, aiming to Improve the effectiveness of strategy learning. RT-H uses a single model to handle both language actions and action queries, leveraging extensive Internet-scale knowledge to power every level of the action hierarchy.
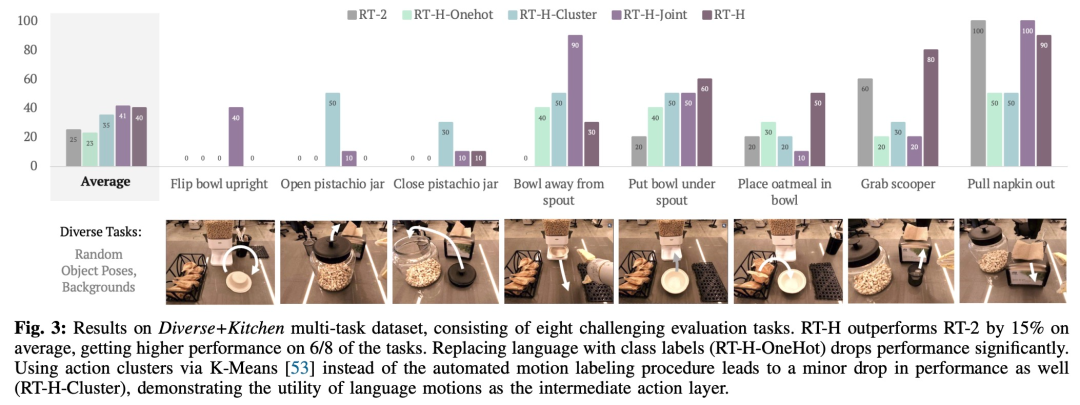
In experiments, researchers found that using the language action hierarchy can bring significant improvements in processing diverse multi-task data sets, compared to RT-2 on a range of tasks Performance improved by 15%. They also found that modifications to the speech movements resulted in near-perfect success rates on the same task, demonstrating the flexibility and situational adaptability of the learned speech movements. Furthermore, by fine-tuning the model for language action intervention, its performance exceeds SOTA interactive imitation learning methods (such as IWR) by 50%. Ultimately, they proved that language actions in RT-H can better adapt to scene and object changes, showing better generalization performance than RT-2.
#In order to effectively capture the shared structure across multi-task datasets (not represented by high-level task descriptions), RT-H aims to learn to explicitly exploit action-level strategies.
Specifically, the research team introduced the intermediate language action prediction layer into policy learning. Language actions that describe the fine-grained behavior of robots can capture useful information from multi-task datasets and can generate high-performance policies. Verbal actions can again come into play when the learned policy is difficult to execute: they provide an intuitive interface for online human correction relevant to a given scenario. Policies trained on speech actions can naturally follow low-level human corrections and successfully complete tasks given correction data. Furthermore, the strategy can even be trained on language-corrected data and further improve its performance.
As shown in Figure 2, RT-H has two key stages: first, predict language actions based on task descriptions and visual observations, and then predict language actions based on predicted language actions, specific tasks, and observation results. Infer precise actions.
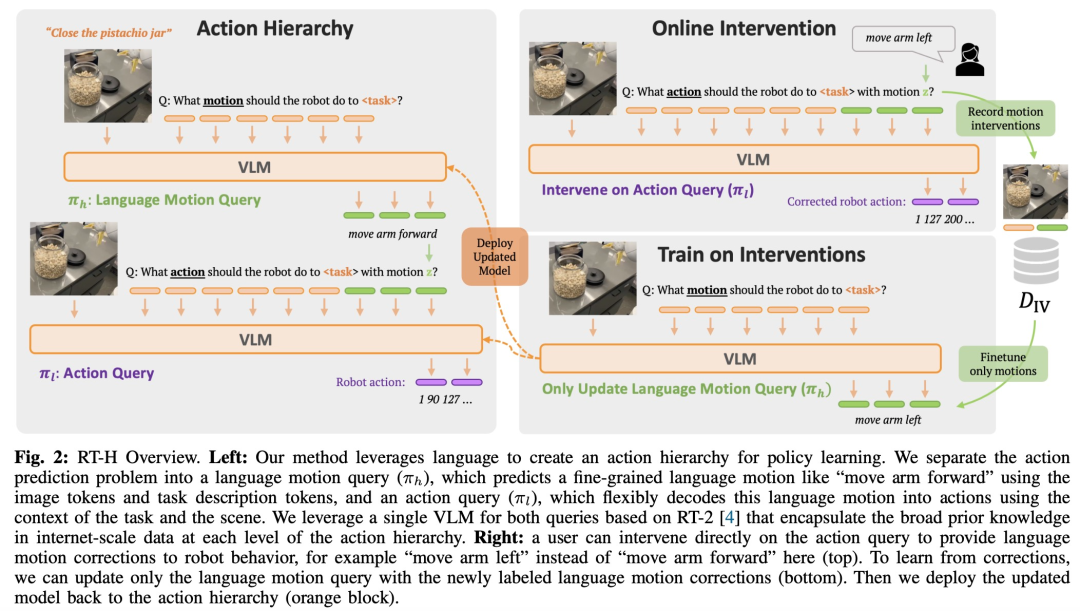
RT-H uses a VLM backbone network and follows the training procedure of RT-2 for instantiation. Similar to RT-2, RT-H leverages extensive prior knowledge in natural language and image processing from Internet-scale data through collaborative training. To incorporate this prior knowledge into all levels of the action hierarchy, a single model learns both verbal actions and action queries simultaneously.
In order to comprehensively evaluate the performance of RT-H, the research team set four key experimental questions:
#In terms of data set, this study uses a large multi-task data set containing 100,000 demonstration samples with random object poses and backgrounds. This dataset combines the following datasets:
The study called this combined dataset the Diverse Kitchen (D K) dataset and used an automated program to label it for verbal actions. To evaluate the performance of RT-H trained on the full Diverse Kitchen dataset, the study evaluated eight specific tasks, including:
1) Place the bowl upright on the counter Up
2) Open the pistachio jar
3) Close the pistachio jar
4 ) Move the bowl away from the cereal dispenser
5) Place the bowl under the cereal dispenser
6) Place the oatmeal in the bowl Medium
7) Take the spoon from the basket
8) Pull the napkin from the dispenser
These eight tasks were chosen because they require complex action sequences and high precision.
The following table gives the RT-H, RT-H-Joint and RT- 2 Minimum MSE of training checkpoint. The MSE of RT-H is about 20% lower than that of RT-2, and the MSE of RTH-Joint is 5-10% lower than RT-2, indicating that action hierarchy can help improve offline action prediction in large multi-task datasets. RT-H (GT) uses the ground truth MSE metric and achieves a 40% gap from end-to-end MSE, indicating that correctly labeled language actions have high informational value for predicting actions.
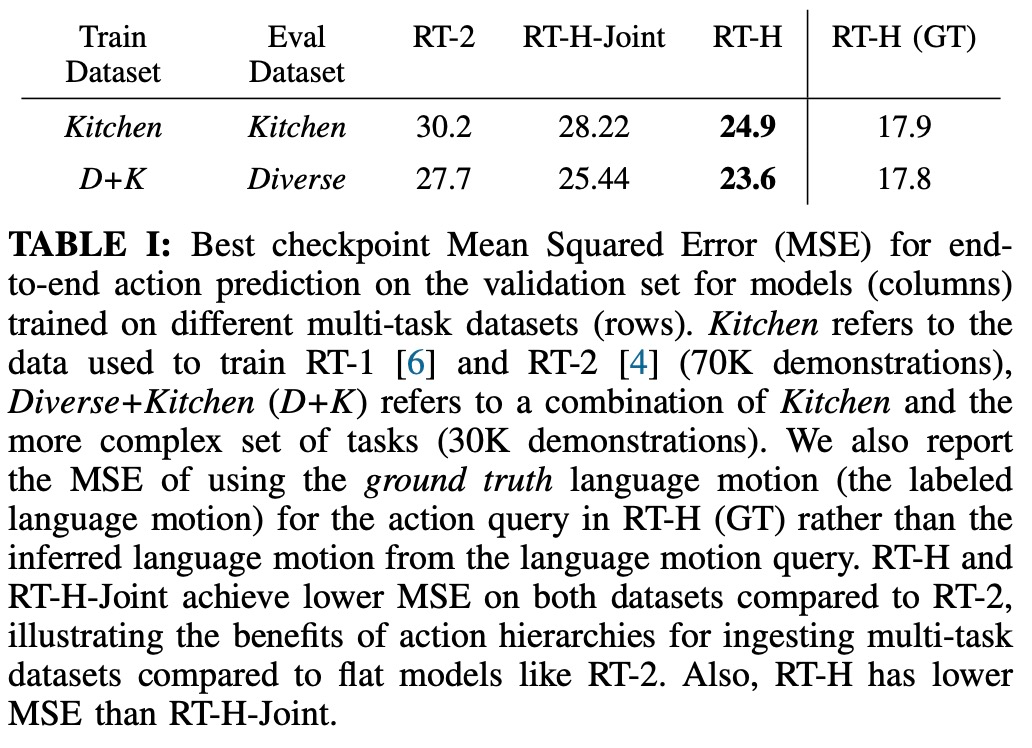
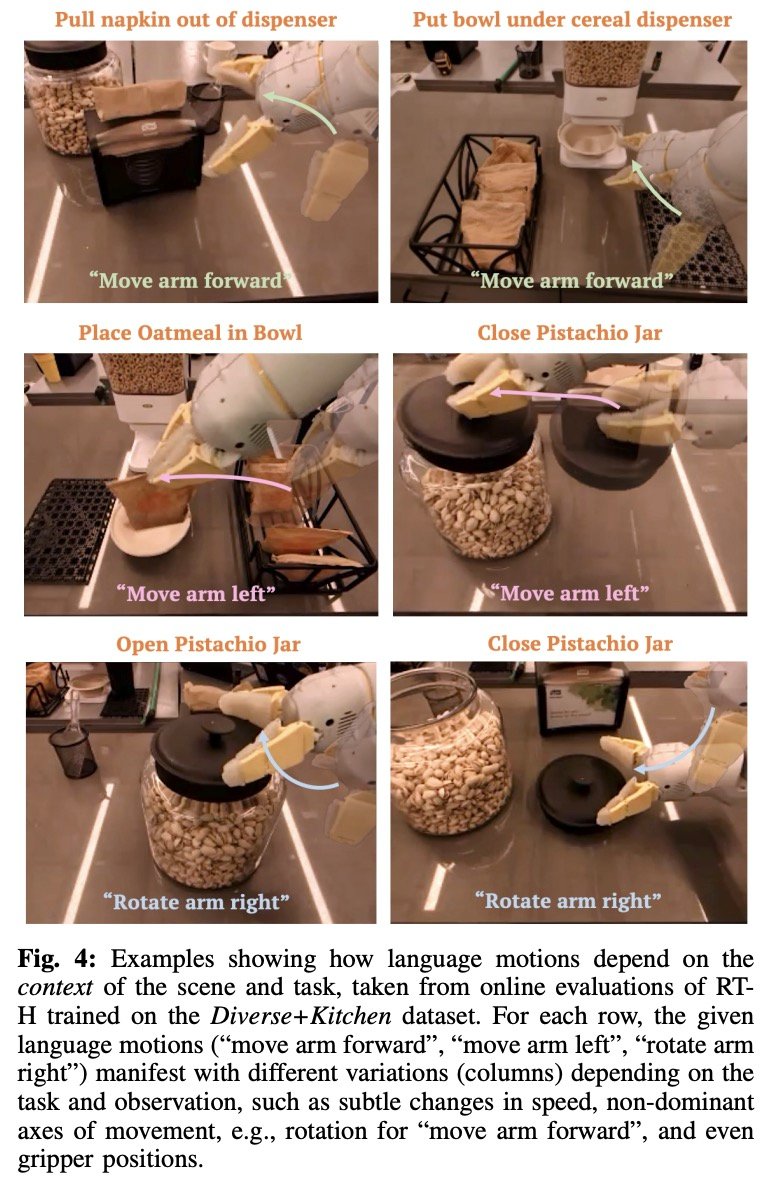
Figure 4 shows several examples of contextual actions taken from the RT-H online evaluation. As can be seen, the same verbal action often results in subtle changes in actions to accomplish the task, while still respecting the higher-level verbal action.
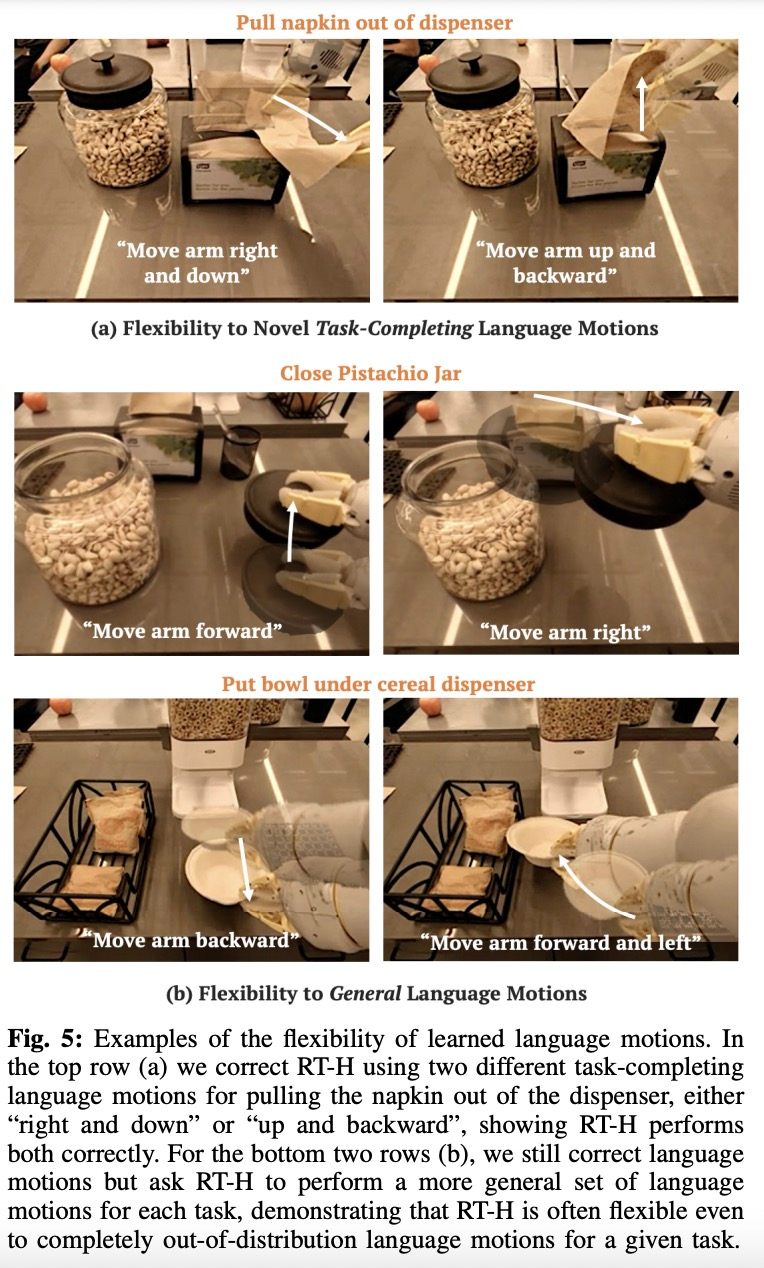
As shown in Figure 5, the research team demonstrated the flexibility of RT-H by intervening online with language movements in RT-H.
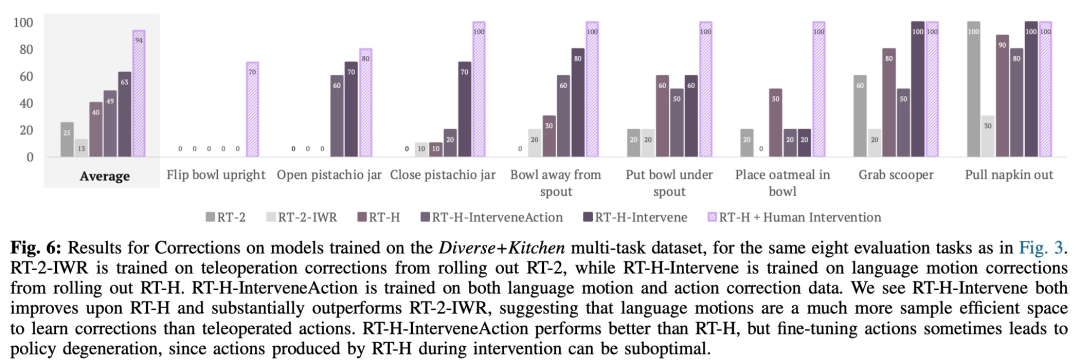
This study also used comparative experiments to analyze the effect of correction. The results are shown in Figure 6 below:
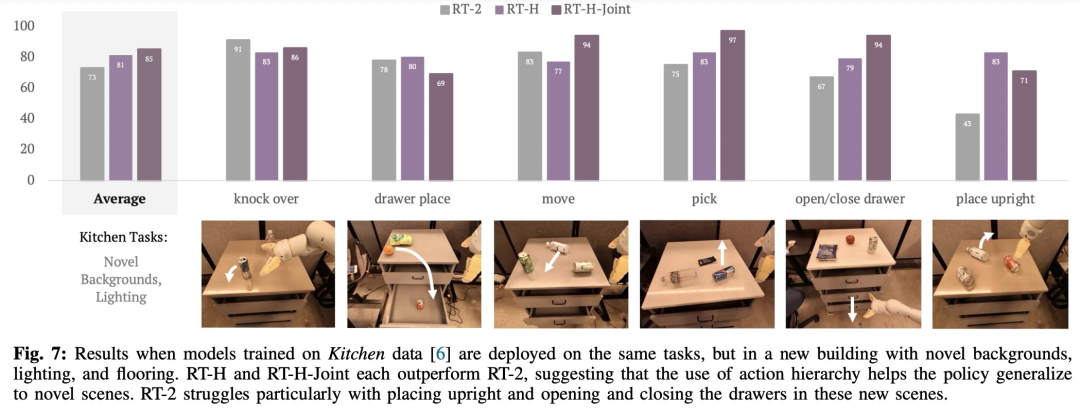
As shown in Figure 7, RT-H and RT-H-Joint are significantly more robust to scene changes:
In fact, there is some shared structure between seemingly different tasks. For example, each of these tasks requires some picking behaviors to start the task, and by learning the shared structure of language actions across different tasks, RT -H completes the pickup phase without any corrections.
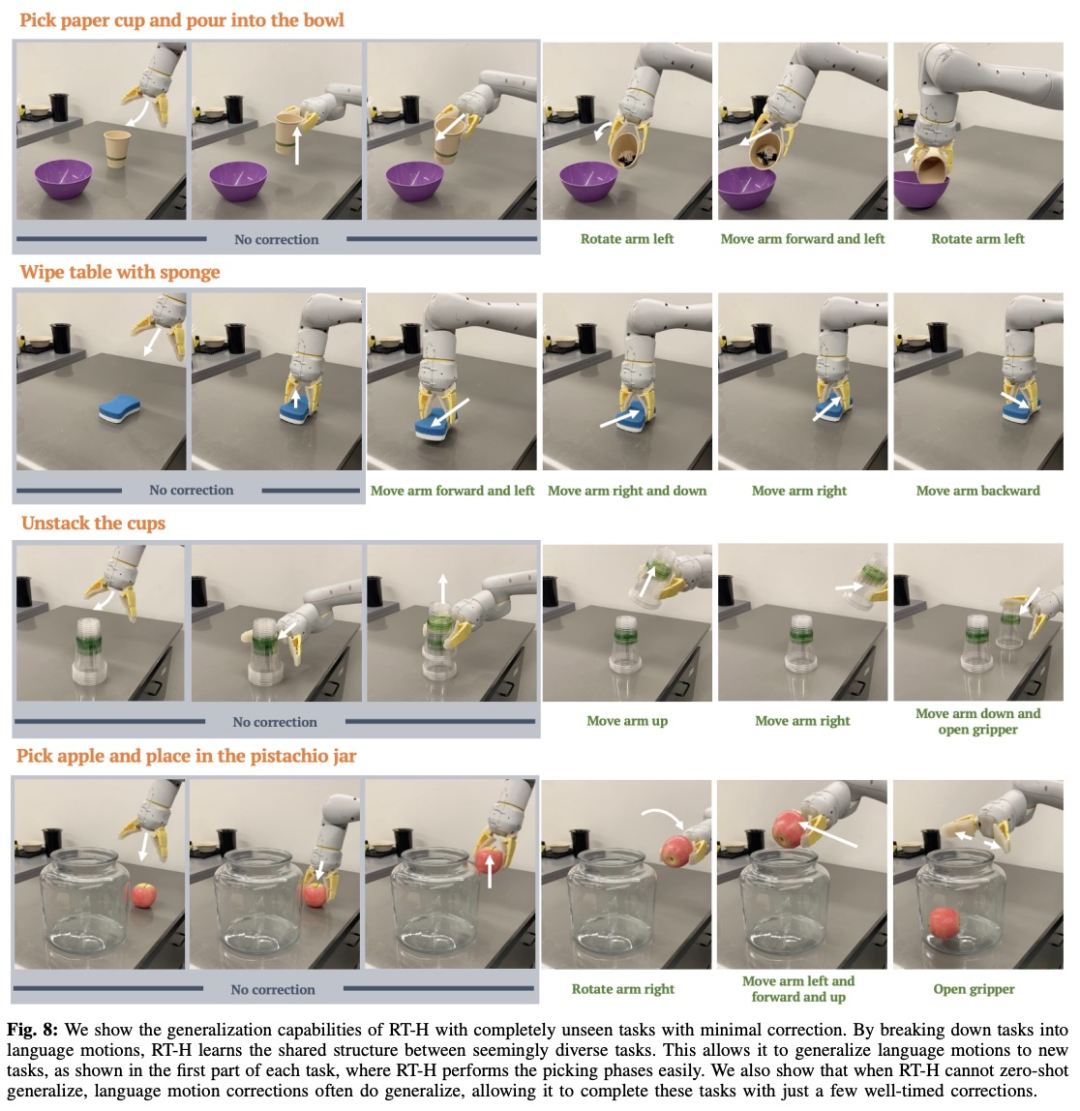
Even when RT-H is no longer able to generalize its speech action predictions, speech action corrections can usually generalize, so just do A few fixes will do the job successfully. This demonstrates the potential of verbal actions to expand data collection on new tasks.
Interested readers can read the original text of the paper to learn more about the research content.
The above is the detailed content of Google's new research on embodied intelligence: RT-H, which is better than RT-2, is here. For more information, please follow other related articles on the PHP Chinese website!





























![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



