


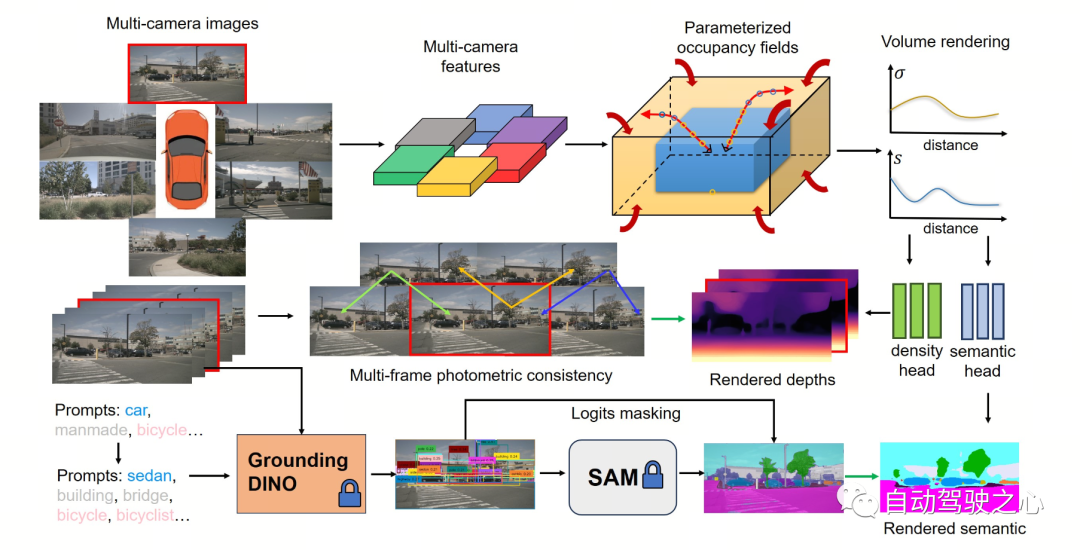
In recent years, the 3D occupancy prediction task in the field of autonomous driving has been widely studied by academia and industry because of its unique advantages. focus on. This task provides detailed information for autonomous driving planning and navigation by reconstructing the 3D structure of the surrounding environment. However, most current mainstream methods rely on labels generated based on LiDAR point clouds to supervise network training. In a recent OccNeRF study, the authors proposed a self-supervised multi-camera occupancy prediction method called Parameterized Occupancy Fields. This method solves the problem of boundarylessness in outdoor scenes and reorganizes the sampling strategy. Then, through volume rendering (Volume Rendering) technology, the occupied field is converted into a multi-camera depth map and supervised by multi-frame photometric consistency (Photometric Error). In addition, the method also utilizes a pre-trained open vocabulary semantic segmentation model to generate 2D semantic labels to endow the occupation field with semantic information. This open-lexicon semantic segmentation model is able to segment different objects in a scene and assign semantic labels to each object. By combining these semantic labels with occupancy fields, models are able to better understand the environment and make more accurate predictions. In summary, the OccNeRF method achieves high-precision occupancy prediction in autonomous driving scenarios through the combined use of parameterized occupancy fields, volume rendering, and multi-frame photometric consistency, as well as with an open vocabulary semantic segmentation model. This method provides the autonomous driving system with more environmental information and is expected to improve the safety and reliability of autonomous driving.

In recent years, with the rapid development of artificial intelligence technology, great progress has been made in the field of autonomous driving . 3D perception is the basis for autonomous driving and provides necessary information for subsequent planning and decision-making. In traditional methods, lidar can directly capture accurate 3D data, but the high cost of the sensor and the sparse scanning points limit its practical application. In contrast, image-based 3D sensing methods are low-cost and effective and have received increasing attention. Multi-camera 3D object detection has been the mainstream of 3D scene understanding tasks for some time, but it cannot cope with the infinite categories in the real world and is subject to dataThe influence of long tail distribution.
3D occupancy prediction can well compensate for these shortcomings by directly reconstructing the geometry of the surrounding scene through multi-view input. Most existing methods focus on model design and performance optimization, relying on labels generated by LiDAR point clouds to supervise network training, which is not available in image-based systems. In other words, we still need to use expensive data collection vehicles to collect training data and waste a large amount of real data without LiDAR point cloud-assisted annotation, which limits the development of 3D occupancy prediction to a certain extent. Therefore exploring self-supervised 3D occupancy prediction is a very valuable direction.
Detailed explanation of OccNeRF algorithmas input, first uses 2D backbone to extract features of N pictures , and then directly obtains 3D features through simple projection and bilinear interpolation (in Parameterized space below), and finally optimize the 3D features through the 3D CNN network and output the prediction results. To train the model, the OccNeRF method generates a depth map of the current frame through volume rendering and introduces the previous and next frames to calculate the photometric loss. To introduce more timing information, OccNeRF uses an occupancy field to render multi-frame depth maps and calculate the loss function. At the same time, OccNeRF also renders 2D semantic maps simultaneously and is supervised by the Open Lexicon Semantic Segmentation Model.
 Parameterized Occupancy Fields
Parameterized Occupancy Fields
This One question. Theoretically, cameras can capture objects at infinite distances, while previous occupancy prediction models only consider closer spaces (for example, within 40 m). In supervised methods, the model can learn to ignore distant objects based on supervision signals; in unsupervised methods, if only the near space is still considered, the presence of a large number of out-of-range objects in the image will have a negative impact on the optimization process. Influence. Based on this, OccNeRF adopts Parameterized Occupancy Fields to model an unlimited range of outdoor scenes.
The parameterization space in OccNeRF is divided into internal and external. The inner space is a linear mapping of the original coordinates, maintaining a high resolution; while the outer space represents an infinite range. Specifically, OccNeRF makes the following changes to the coordinates of the points in the 3D space:
where is the coordinate,, is an adjustable parameter, indicating the boundary value corresponding to the internal space. is also an adjustable parameter, indicating the proportion of the internal space occupied. When generating parameterized occupancy fields, OccNeRF first samples in the parameterized space, obtains the original coordinates through inverse transformation, then projects the original coordinates onto the image plane, and finally obtains the occupancy field through sampling and three-dimensional convolution.
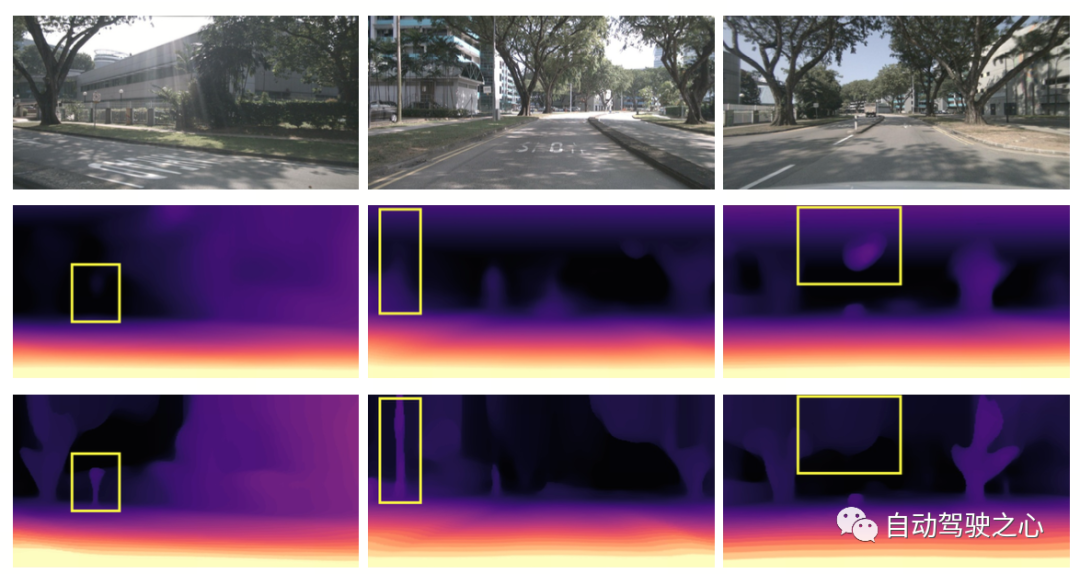
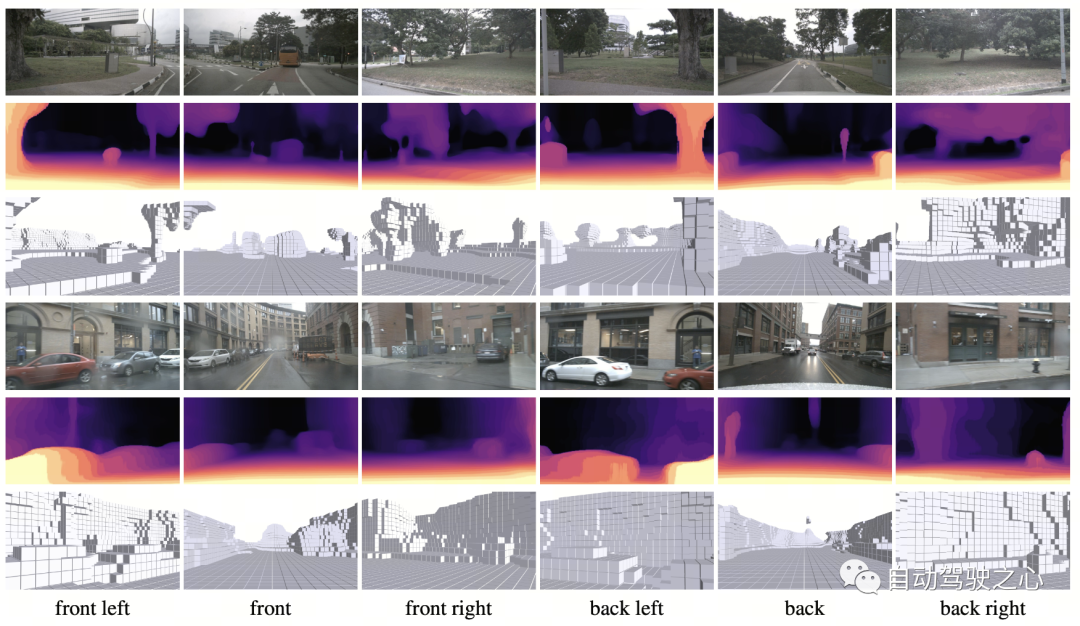
In order to train the occupancy network, OccNeRF chooses to use volume rendering to convert occupancy into a depth map and supervise it through a photometric loss function. The sampling strategy is important when rendering depth maps. In the parameterized space, if you directly sample uniformly based on depth or parallax, the sampling points will be unevenly distributed in the internal or external space, which will affect the optimization process. Therefore, OccNeRF proposes to directly sample uniformly in the parameterized space under the premise that the camera center is close to the origin. Additionally, OccNeRF renders and supervises multi-frame depth maps while training.
The figure below visually demonstrates the advantages of using parameterized space representation. (The third line uses the parameterized space, and the second line does not.)
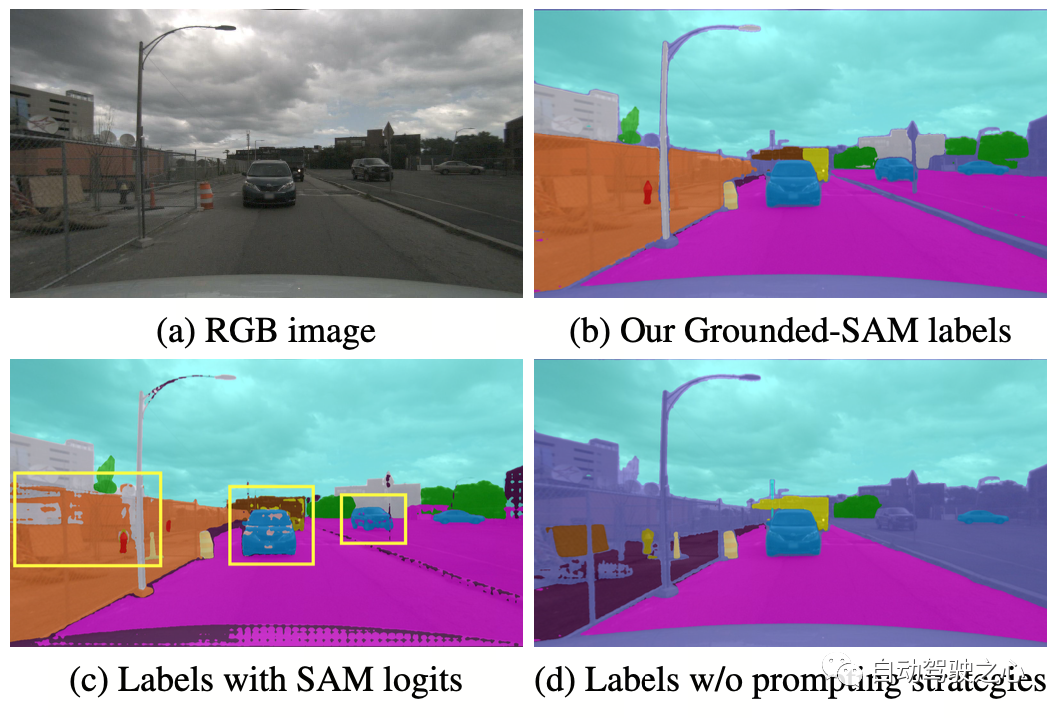
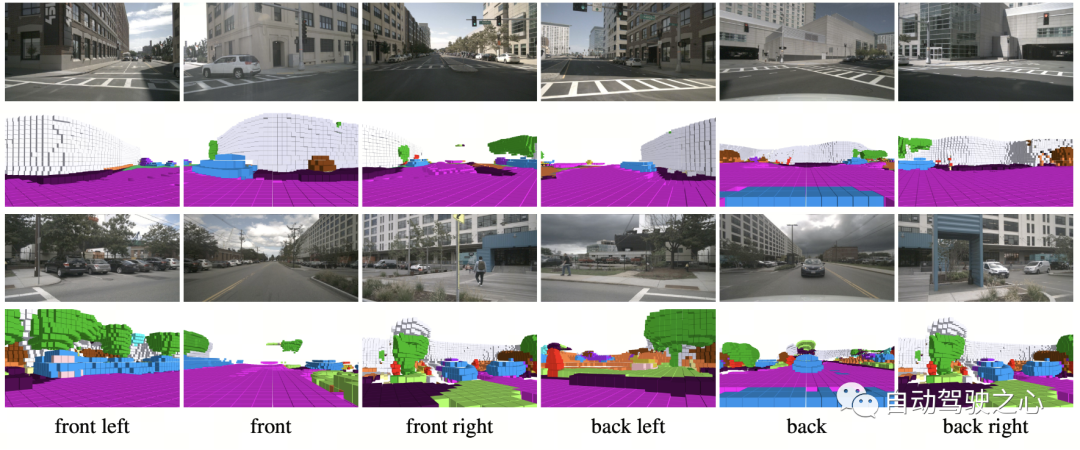
OccNeRF uses pre-trained GroundedSAM (Grounding DINO SAM) generates 2D semantic labels. In order to generate high-quality labels, OccNeRF adopts two strategies. One is cue word optimization, which replaces vague categories in nuScenes with precise descriptions. Three strategies are used in OccNeRF to optimize prompt words: ambiguous word replacement (car is replaced by sedan), word-to-word multi-word (manmade is replaced by building, billboard and bridge), and additional information is introduced (bicycle is replaced by bicycle, bicyclist). The second is to determine the category based on the confidence of the detection frame in Grounding DINO instead of the pixel-by-pixel confidence given by SAM. The semantic label effect generated by OccNeRF is as follows:

The above is the detailed content of OccNeRF: No lidar data supervision required at all. For more information, please follow other related articles on the PHP Chinese website!
 How to solve the problem that the print processor does not exist
How to solve the problem that the print processor does not exist
 How to delete my WeChat address
How to delete my WeChat address
 The computer has Internet access but the browser cannot open the web page
The computer has Internet access but the browser cannot open the web page
 Usage of ppf function in Python
Usage of ppf function in Python
 word forced line break
word forced line break
 How to solve website restore error
How to solve website restore error
 What is the use of java
What is the use of java
 How to run phpstudy project
How to run phpstudy project





















![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



