


In Collaborative, Connected and Automated Mobility (CCAM), intelligent driving vehicles have greater capabilities in perceiving, modeling and analyzing the surrounding environment. The stronger they are, the more aware and able they are to understand, make decisions, and execute complex driving scenarios safely and efficiently. High-precision (HD) maps represent road environments with centimeter-level accuracy and lane-level semantic information, making them a core component of intelligent mobility systems and a key enabler of CCAM technology. These maps provide automated vehicles with a powerful advantage in understanding their surroundings. HD maps are also considered hidden or virtual sensors because they bring together knowledge from physical sensors (maps), namely lidar, cameras, GPS and IMU, to build a model of the road environment. HD maps are rapidly evolving towards holistic representations of smart city digital infrastructure, including not only road geometry and semantic information, but also updates on real-time perception of road participants, weather conditions, work zones and incidents. Large-scale deployment of autonomous vehicles requires these maps to be built and maintained by a large fleet of vehicles that work together to continuously update the maps so that the autonomous vehicles in the fleet can function properly. This paper provides an extensive review of the various applications of these maps in highly automated driving (AD) systems. We systematically review recent advances in different methods and algorithms for constructing and maintaining high-precision maps. Data, communications, and infrastructure requirements for HD map distribution are also discussed and synthesized. Finally, current challenges are reviewed and future research directions for next-generation digital mapping systems are discussed.
Modern satellite The advent of systems and imaging technologies revolutionized the creation of accurate and detailed digital representations of the world, resulting in what we now call digital maps, such as Google Maps, OpenStreetMap, Apple Maps, Garmin, and Mapbox. Digital maps encode road structure and basic semantic information as well as points of interest (POIs). There are several methods and techniques for extracting and identifying the geographic features needed to construct these maps from satellite imagery. Digital maps are now an essential tool in our daily lives, especially when integrated with GPS. In fact, this integration has been a core component in building a large number of digital services, most importantly navigation and routing. Developed primarily to aid humans, these maps are now available in the latest vehicles to aid human drivers. However, these maps are limited in their accuracy and precision and the update time required by AD, where vehicles require a certain degree of location accuracy as well as detailed lane-level information.
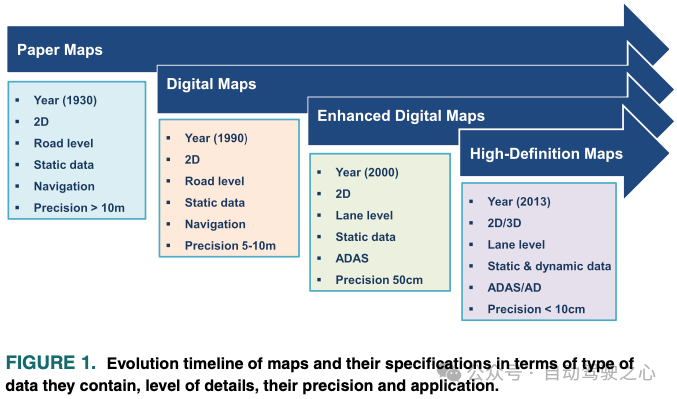
Digital map has been significantly improved to meet the requirements of advanced driver assistance system (ADAS) functions such as lane keep assist and Adaptive Cruise Control (ACC). Typical features in these enhanced digital maps include speed limits, road curvature and gradient, lane information, and traffic signs and traffic lights. Enhanced digital maps, also known as ADAS maps, are now an integral part of most modern vehicles, enabling ADAS functionality. Although enhanced digital maps introduce lane-level information, their geometric accuracy and level of semantic detail limit their applicability at higher levels of autonomy. In AD systems, vehicles are required to position themselves with high precision relative to their environment, understand the current situation, and plan collision-free trajectories. To achieve this level of autonomy, automated vehicles need to acquire not only maps with centimeter-level position accuracy and lane-level geometric information, but also a 3D model of the environment, with all static and dynamic features of the road environment.
It is necessary to generate a high-precision map, or a high-precision map, to meet the above requirements. Figure 1 illustrates the evolution, characteristics and uses of maps, as well as the information, accuracy and level of detail contained.
Over the past decade, both academia and industry have made high-definition maps available through huge research and development efforts. Pushing the limits of being affordable, self-maintaining, and scalable. However, there are still some unresolved issues in building HD maps to scale that hinder the full potential and ultimate goal of HD maps in enabling autonomous mobility. These challenges can be divided into the following categories.
This paper provides an in-depth overview of HD maps, including a unified model of its layered architecture. At the same time, the importance of high-precision maps in the modular AD system is emphasized, and their use in various AD core functions is synthesized. This article provides an extensive review of challenges in map data collection, communication, processing, security, and cost, including cost-effective solutions and communication and map data requirements from generation to distribution. Additionally, current challenges in building and maintaining HD maps are discussed. Finally, some inspirations are provided for future and next-generation mobile high-precision maps. To summarize the main contributions:
Early HD maps were just extensions of the enhanced digital maps used in ADAS, they were called early maps . The term HD Maps has only recently emerged, but is now widely accepted by the CCAM industry, including Tier 1 automotive companies, map providers and OEMs. HD maps encapsulate all the necessary information for automated vehicles to understand the driving environment with very high accuracy. While it is generally accepted that HD maps are the core enablers of CCAM, there are no clear guidelines or standards for what information constitutes HD maps and how to represent this information. Nonetheless, HD maps available on the market share common features. Centimeter-level position accuracy and the availability of lane-level geometric and semantic information are essential features in most HD maps. At its most basic level, an HD map can simply be a set of points and line segments whose exact locations represent road signs, lane markings, lane boundaries and lane separators. Due to the requirements of AD systems, today's high-precision maps are becoming more and more complex, and data from different sources constitute multiple layers of information about the driving environment. Breaking down HD maps into multiple layers allows for a more structured data representation of the road environment. This facilitates the accessibility of different components of the AD system, which require the environment to be modeled at different levels of detail. Additionally, hierarchical data representation makes map construction, storage, retrieval, and maintenance easy. Examples of these layers are given in Figure 2.
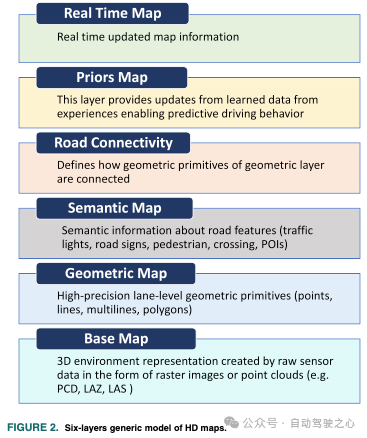
As mentioned above, there are several ways to represent map information used in AD systems, including lane-level details such as lane boundaries, lane marking types, traffic directions, crosswalks, drivable area polygons, and intersection annotations. Although the driving environment is highly dynamic, the data represented in these three layers is static. The overall representation of the environment should also include real-time traffic information on observed speeds, weather conditions, congestion areas, road blocking areas (construction), etc. This section attempts to provide a global overview of the information stored in these layers in a unified manner. Although most HD map providers have their own definitions and formats, and there is no single standard for HD maps, we divide the information contained in HD maps into six different layers, as shown in Figure 2.
The base map layer is the foundation of the HD map and is considered the base upon which all other layers are built. Reference layer. It contains a highly accurate three-dimensional geospatial representation of the environment, such as the location and shape of roads, buildings, and other structures. Three-dimensional geospatial models of the road environment are becoming an important source of information for autonomous vehicles. Today, HD maps often contain three-dimensional representations of the environment. Base map layers are typically created using point clouds from lidar and/or images from one or more cameras, sometimes with the help of GPS/IMU. This suite of sensors forms an MMS that creates a highly accurate and detailed 3D point cloud representing the environment. Geometric and semantic features of roads and lanes are extracted from this layer to build other layers in the HD map. Because this layer contains a dense data representation of the environment, it plays a crucial role in the precise localization of autonomous vehicles. Several techniques for point cloud registration allow vehicle pose to be estimated by matching raw sensor data to the point cloud of that layer. Building and updating this layer is challenging in terms of data processing and communication needs.
Although the base map layer provides a precise and dense representation of the environment, it lacks meaningful features in its representation that support understanding the environment. capabilities are limited. Geometry layers in HD maps provide detailed information about the geometry of the road environment, including the location and shape of roads, lanes, curbs, and other features. The geometry layer typically includes information about the width of the road, the number of lanes, the centerline of each lane, the boundaries of the lanes in each road, and the elevation of the road surface. It also includes information on the precise location and shape of curbs, sidewalks, crosswalks, and vertical and horizontal traffic signs. Each of these features is represented by basic geometric primitives, namely points, lines, polylines, and polygons. For example, the location of a vertical traffic sign can be represented by a point. A lane centerline or boundary can be represented by a set of interconnected line segments, such as a polyline. Similarly, a crosswalk can be represented by a polygon. The geometric features of this layer are created by processing the data from the base map layer. Building a geometry layer from base map data typically involves several processing steps, including road segmentation, lane information extraction, road signs, poles, traffic signs, curbs, obstacles, and pavement features. This layer provides a highly accurate lane-level geometric representation of road features. Geometric features in HD maps are crucial for various AD core components, most importantly accurate motion prediction of dynamic road participants, and safe planning of geometrically feasible trajectories.
The semantic map layer defines the importance of road features provided by the geometry map layer. The data in this layer provides context and meaning to the features represented in the map. For example, a semantic map layer in an HD map contains information such as road type (e.g., highway, residential road) and lanes (e.g., may change to the left or right), their numbers, traffic direction, and whether the lane is used for turning or for turning. Information about parking. It also includes information about speed limits, lane boundaries, intersections, crosswalks, traffic signs, traffic lights, parking spaces, bus stops and many other features that are important for building contextual representations of the environment. The semantic map layer allows autonomous vehicles to build detailed situational representations of their environment and understand traffic rules, enabling them to make correct and safe decisions in different traffic scenarios. Simply put, the semantic map layer assigns semantic labels to road features and objects defined in the geometric map. For example, a point in a geometry layer is nothing more than an ordered set of coordinates in a map coordinate reference system. Only the semantic layer defines whether the point corresponds to a traffic light, yield sign, or stop sign. As we all know, high-precision maps contain rich semantic information. The semantic layer also associates metadata with road features, such as road curvature, recommended driving speed, and unique identifiers for each semantic feature. In fact, semantically rich HD maps enable self-driving cars to better understand the driving situation and make complex decisions in complex scenarios. However, constructing reliable and high-fidelity semantic graphs of road environments is not a simple process. Several processing steps are required, not limited to scene segmentation, object detection, classification, pose estimation, and mapping. With recent advances in computer vision, deep learning, sensor fusion, and semantic SLAM algorithms, it has become possible to build accurate semantic graphs.
The road connection layer describes the topology of the road network and how various geometric elements are connected. Contrary to the standard definition of a digital map, which only contains road-level information and road-level connections, HD maps contain lane-level geometric and semantic information, so the connections between roads become complex as it defines two or more sets of lanes. connections between. More precisely, this layer provides the layout and connectivity of the road, including lane boundaries and centerlines and intersections. Lane-level connectivity information is necessary for planning legal transitions between roads and lanes and for planning allowed operations at each intersection, which is critical for path planning for autonomous vehicles. Simply put, this layer defines how the primitives that make up the geometry layer are connected to each other. These connections are established by defining sequential pairs of geometric and semantic elements. Assigning a unique identifier to each geometric and semantic element enables the representation of this information using graph data structures, where each element is represented by an edge and their connections as nodes. The graphical structure allows for quick querying and searching of maps, and efficient route planning.
This layer is also called the prior map layer because it represents and learns information from past experience. It involves geometric and semantic elements in the map whose state changes over time. Learning traffic flows and the status of accident areas from fleet data allows for more efficient and predictive driving behavior. This layer also acquires and learns information that helps predict human driving behavior and the dynamic state of traffic lights at intersections. It also adapts to temporary road settings such as parking orders, occupancy and timetables. For example, on-street parking in some cities changes on certain weekdays, the probability of occupancy is predicted, and the time rules governing a given parking lot are derived from previous map layer sensor readings of different fleet vehicles passing through that parking lot. out. Learning and predicting the driving behavior of road drivers can be challenging due to sociocultural differences between different societies. Empirically modeling these behaviors is critical for a general and scalable AD system.
The real-time layer in HD maps is a dynamic layer that provides real-time information about the environment, such as traffic conditions, road closures, and other possible impacts Events for autonomous vehicle navigation. This layer is typically created by combining data from various sources, such as cameras, sensors and other connected devices mounted on vehicles or located on the roadside. Through crowdsourcing of participating vehicles or smart infrastructure using specific communication networks, data is collected in real time and used to update high-precision maps. The real-time layer can include information such as the location and speed of other vehicles, the location and status of traffic signals, and the presence of construction zones or other obstacles and blockages on the road. This information is critical for autonomous vehicles to make safe and efficient driving decisions in real time to optimize traffic flow and reduce congestion. Additionally, the real-time layer can be used to improve the accuracy and completeness of HD maps by providing up-to-date information about the environment that may not have been captured by the sensors used to create the map. Simply put, the real-time layer in HD maps provides a dynamic, up-to-date representation of the environment. Real-time updating of HD maps with dynamic elements is challenging and requires complex intelligent communication infrastructure and cooperation among multiple actors. Data transmission between intelligent transportation systems (ITS), HD map providers and vehicles must be reliable and meet certain requirements described later in this survey.
High-precision map provides the AD system with a detailed and accurate representation of the road environment. These maps contain lane-level geometric, topological, and semantic information required for safe and efficient navigation of autonomous vehicles. The use of HD maps in self-driving cars allows them to better understand their surroundings, plan routes, and make more accurate driving decisions to ensure the safety of passengers and other road users. This section discusses the importance and use of high-precision maps in AD systems. Ultra-precision map data is now an integral part of most of the different core components in AD systems. In order to discuss the importance and use of HD maps in AD, we briefly introduce the architecture and standard components of a typical modern AD system. Figure 5 shows the standard components of an AD system, showing those components that rely on HD maps. This section begins with a brief introduction to the architecture of the AD system, how it works, and its various components. The remainder of this section provides an extensive review of the state of the art in AD components that rely on HD maps.
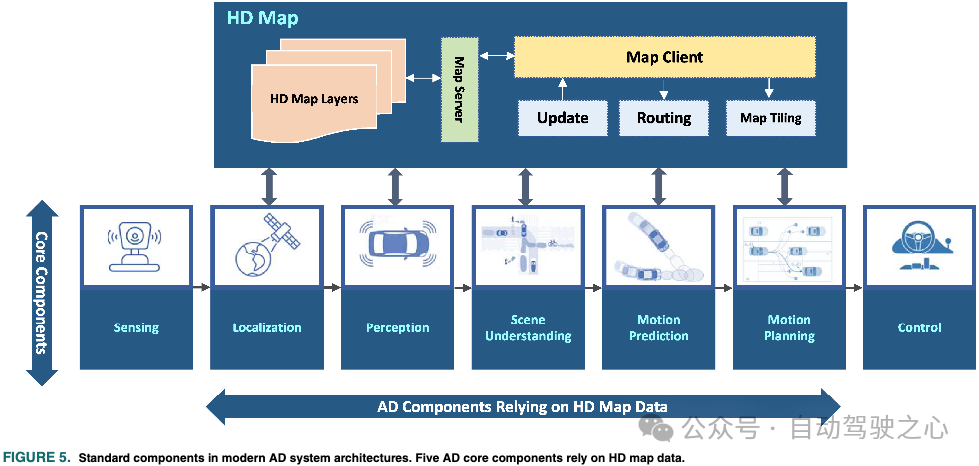
An automated vehicle is a complex cyber-physical system in which different components must work together to complete the whole in a robust, reliable and safe manner driving tasks. Although there is no unique architecture for AD systems, we rely on a common architecture in this work that helps us understand how HD maps can be used to improve different functions of AD systems. Similar to any robotic system, an autonomous vehicle can be viewed as a cognitive agent with three main components, (1) sensors, (2) perception, and (3) behavior. Breaking these elements down into an industry-grade AD system results in several components, as shown in Figure 5. Sensing components in modern AD system architecture usually include different sensors such as IMU, GPS, cameras, lidar and radar. A subset of these sensors allows the vehicle to know its position relative to the environment, i.e. for localization, and the remaining sensors are used to sense the environment itself. The role of the sensing component is to read and preprocess raw sensor data and provide it to other parts of the AD system. In its simplest form, a sensing component consists of a set of sensor drivers that read raw sensor data in real time. The positioning component is one of the most critical components for the reliable operation of the entire AD system. Its purpose is to accurately estimate the vehicle's position. Localized errors are propagated to the rest of the AD processing pipeline. Localization is simply a state estimator that fuses raw sensor data from sensing components. Furthermore, the availability of maps allows for improved and robust localization, especially in areas where some sensors have failed or degraded performance. The role of perception is to generate an intermediate-level representation of the current state of the environment, including information about obstacles and road factors. This representation also includes details about lanes (location, boundaries, markings, and types), traffic signs, traffic lights, and drivable areas. Computer vision and deep learning techniques are widely used for segmentation, clustering, and classification tasks. Additionally, target-level fusion is also an important part of this component. The output of perception is a list of tracked objects and a semantic segmentation of the image for scene understanding. Geometric and semantic information from HD maps can also be used to improve object detection and fusion. Accurate perception is critical to safety, as perception errors can affect the quality of information used by the entire AD system. Therefore, using redundant sensor data sources can increase confidence in the accuracy of the perception, thereby improving the robustness of the overall system. The scene understanding component is the bridge between the perceptual component in the AD system and the abstract mid-level state representation of the environment given by the high-level cognitive component. This component aims to provide a higher level of contextual understanding of driving scenarios by building high-precision maps and data provided by the perception component. Later in this section, we discuss how these two sources of information can be fused to build a scene representation for understanding the driving environment. Another component in the AD pipeline that relies on HD maps is the motion prediction component. It builds on high-level spatiotemporal representations of the environment provided by scene understanding to predict the behavior of road agents around the vehicle. The role of HD maps in motion prediction is to provide the previous trajectories of each road agent in the scene. Motion prediction is a highly multimodal problem in which HD maps play a key role, which is discussed in detail in this section. The motion planning component is designed to calculate feasible, collision-free and safe trajectories for autonomous vehicles. This is achieved by optimizing the global shortest path obtained by the routing algorithm running on the HD map data and the predicted trajectory of the road agent. Motion planning also includes behavior planning capabilities that rely on the state of the current scene defined by detected objects and HD maps. The control unit receives the planned trajectory and calculates control commands for the steering, braking and acceleration drive systems. The control component does not explicitly rely on map data, so it will not be considered in this investigation. Finally, as shown in Figure 5, a special component is used to serve all other components by handling requests to provide map data. HD map data is typically stored in a database that is queried by a map server (local or cloud) to route, tile, and update requests from map clients in the vehicle. Since the routing element requires special algorithmic processing, we will consider it in the survey of HD map applications in AD systems.
The positioning component in the AD system is designed to estimate the position and orientation of the vehicle relative to the global reference coordinate system. Its key role is to continuously maintain high accuracy and robustness in the required estimates of successive components in the system. The accuracy of the positioning algorithm determines the reliability of the entire AD system. Robustness of positioning under adverse weather conditions is a key requirement for modern AD systems, as degraded estimation performance can lead to severe consequences and potential damage. Over the past two decades, significant research on positioning has achieved remarkable results, resulting in a variety of methods. To ensure normal operating conditions and achieve global system safety, autonomous vehicles need to be positioned with an accuracy of within 10 centimeters.
The perception component in AD systems is often associated with processing raw camera images and lidar point clouds, and is not only used to detect and track static targets (e.g., traffic signs and road markings), and is also used to detect and track dynamic obstacles such as surrounding vehicles, pedestrians, and cyclists. Perception is one of the key core functions of AD systems. Ensuring its reliability and real-time performance is critical to ensuring collision-free navigation. Fusing perception data with the detailed and precise geometric and semantic information contained in the layers of HD maps can potentially improve perception by focusing on the most relevant regions of interest (ROI). More precisely, the geometry of the HD map allows defining ROIs to filter the point cloud, leaving only those of particular interest to the perceptual function, thereby simplifying and increasing the computational efficiency of unhurried detection.
Understanding the driving environment is crucial for autonomous vehicles to make correct and safe decisions. One of the early motivations for HD maps was to provide autonomous vehicles with precise and detailed information to help understand their environment. This information enables the AD system to understand the current driving situation and interpret all entities that make up the scene. The geometry and semantics contained in the map make it possible to systematically build compact data models and environment representations, allowing vehicles to handle complex driving scenarios. More precisely, the scene understanding component in AD systems, supported by the geometric and semantic information of HD maps, can consistently provide meaningful perceptual context. In addition to raw object detection, scene understanding aims to extract and estimate safety-critical information and make it available for subsequent processing stages.
Road-level digital maps aid human driver navigation. Route calculations in these maps cannot go beyond using road-level connections because these maps do not include lane-level details. Accurate and optimized driving routes are necessary to save time and energy and promote vehicle safety worldwide. Efficient and low-cost driving route calculations must consider lane-level models of the environment. Furthermore, in highly dynamic environments, detailed information about traffic status and lane occupancy is critical to dynamically adjust routes as autonomous vehicles navigate the environment. Taking into account the detailed and accurate lane-level information as well as the a priori and real-time layers of the HD map static layer, efficient dynamic route calculation is possible. In order for the routing subsystem in an autonomous vehicle to calculate a drivable path from the current location to a set destination, the system must be provided with the latest map from the HD map server, as shown in Figure 5. Alternatively, like digital maps, route calculations can be provided as a service. After its accurate position is sent to the HD map server, the optimal route can be calculated and fed back to the vehicle to support other core components of the system. In the past few years, these routing services have involved taking into account real-time traffic conditions and energy factors (e.g., the most energy-efficient route). For autonomous vehicles, other factors can be considered, such as routes that avoid complex urban environments that are difficult to navigate with ADS, or routes with good network coverage to guarantee continuous connectivity to online services, including real-time high-precision map services.
The role of motion planning in the AD system is to generate feasible, safe, collision-free and energy-saving trajectories. Motion planning tasks typically include trajectory generation and behavior planning. Behavior planning is an advanced decision-making function used to decide transitions between different driving states, such as lane changes, following vehicles in the lane, slowing down and parking, etc. To perform these transformations safely, the behavior planner requires local maps and vehicle awareness to build a transformation model of the vehicle environment. Unlike navigation in mobile robots, the road environment is highly structured and all road users must obey traffic rules. The generated AD trajectories are strictly required to ensure compliance with traffic rules and movement within drivable road areas. Different methods exist for motion planning of autonomous vehicles, and they all rely to some extent on geometric and semantic information provided by high-precision maps to comply with traffic rules. In sample-based motion planning methods, the lane geometry of the HD map is used to restrict the search space by rejecting infeasible candidate trajectories.
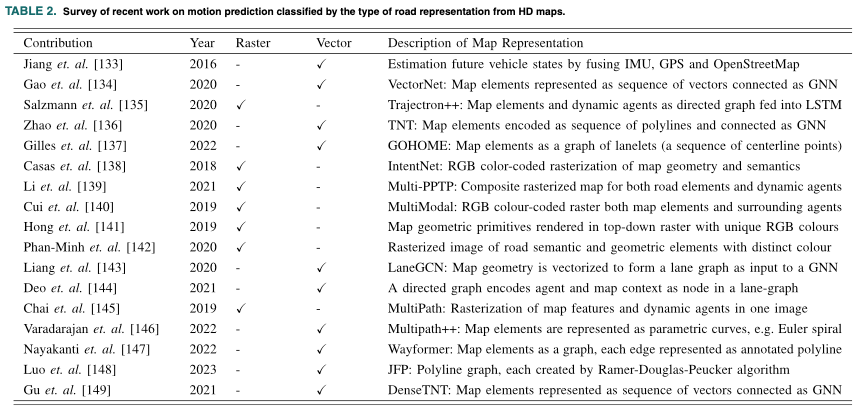
The driving environment is highly dynamic and involves different road actors such as pedestrians, vehicles and cyclists. Predicting the future movements and behaviors of these road actors is critical for autonomous vehicles to build context-aware representations of their interactive environments, thereby predicting potentially hazardous situations. From an abstract perspective, these traffic participants can be thought of as a complex multi-agent system. In fact, developing reliable solutions for predicting road agent motion and behavior will improve the safety and ability of autonomous vehicles to adapt to human-like behavior in real-world traffic conditions. Predicting the behavior of these traffic participants is crucial to AD systems and is mainly used for risk assessment and safe and comfortable movement planning. Motion prediction refers to estimating the future behavior of road agents based on their current state and a model of their environment. Various research efforts have addressed the problem of predicting future movements of road participants.
High-precision maps can provide accurate and reliable GT data, which can be used as a reference for calibrating sensor output. For example, lidar can be calibrated using high-precision coordinates of geometric elements of a high-definition map and perfectly aligned with an IMU. By comparing sensor measurements to HD map data, any errors or discrepancies can be identified and corrected, improving sensor calibration. Additionally, HD maps can be used for online (self-)calibration. The availability of HD maps, real-time raw sensor data and algorithms to perform comparisons makes it possible to calculate the error between sensor measurements and GT. Therefore, it allows continuous correction of sensor calibration errors in real time. This makes the AD system more robust and reliable to changing environmental conditions as well as changes in sensor performance. Online calibration enables more accurate and robust sensor calibration compared to offline calibration methods. More recently, HD maps have also been used to enhance road annotations to create large datasets for traffic landmark detection.
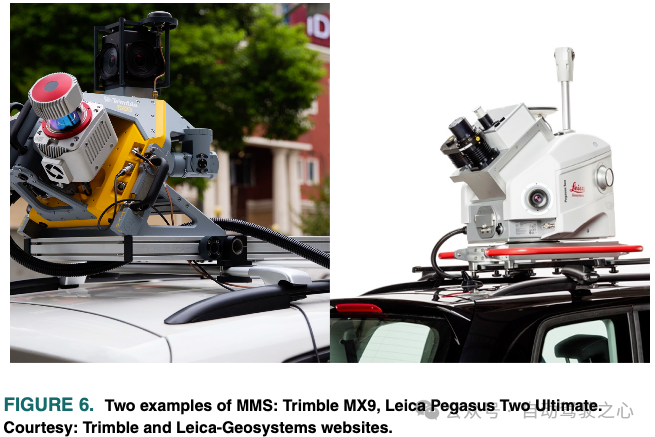
Constructing high-precision maps is a complex process. Several steps are required. The first step in building an HD mapping program is to dispatch specialized vehicles equipped with a suite of highly accurate and well-calibrated sensors to survey and collect data about the environment. Data collection vehicles used for mapping may be equipped with connections to correction services with RTK (real-time kinematics) positioning accuracy up to a few centimeters or high-precision GNSS enabling correction services. GNSS positioning measurements are often integrated with measurements from high-performance IMUs (Inertial Measurement Units) and wheel odometers. There are several commercial products integrating GNSS and IMU as an inertial navigation system in one unit. Mapping vehicles are also equipped with one or more high-resolution lidar and cameras to collect raw 3D/2D data of the road environment. There are two ways to set up a data collection tool for mapping. The first step is to purchase the above sensors, select the appropriate configuration and install them on the vehicle. Although this approach offers the flexibility of pre-defined sensor configurations; however, calibrating several different sensors to the accuracy required for plotting is not trivial and time-consuming, especially for cameras. Alternatively, some manufacturers offer an entire set of sensors in a single package, called a mobile mapping system (MMS). An example of a commercial MMS is shown in Figure 6.
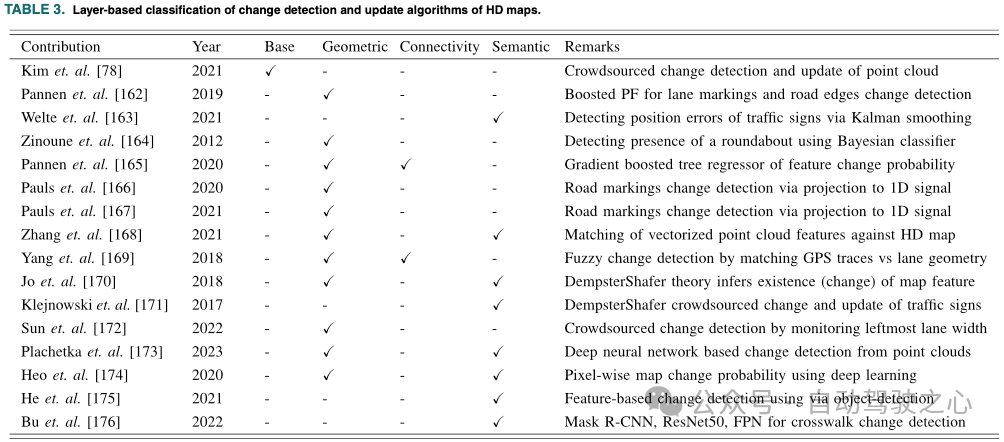
Having the latest high-definition maps is crucial for the correct operation of various AD core components. Bugs in HD maps can cause serious damage due to poor decisions made by the system. Wrong decisions can be avoided through frequent updates of map vehicles. The road environment is highly dynamic and may change frequently due to new infrastructure construction, road maintenance, and lane expansions. The mapping vehicle must be able to detect changes in the environment and send them to update the map. The map update process involves complex processing steps, including processing data from multiple sources and sensors at different scales, identifying deviations between the stored map and newly collected environmental data, and finally integrating these deviations to update the different layers of the map. Several methods and approaches have been developed in the literature to capture changes in HD maps and update them. In the following, we review different methods and methods for detecting changes in HD maps and how this information can be applied to update maps. The approach we followed to investigate previous efforts to maintain HD maps is based on analyzing the layers maintained by each state-of-the-art method, as shown in Table 3.
Change detection in HD maps refers to the process of identifying changes in the environment, such as new buildings, Road closures etc. The map's layers are then updated accordingly. HD maps change regularly, and having a map that can be trusted by self-driving cars is critical to safe navigation. Change detection is typically achieved through the use of various sensors, such as cameras, lidar, and radar, combined with computer vision algorithms and machine learning techniques. Even before the advent of high-definition maps, change detection algorithms have found their way into many applications. Remote sensing is one of the early applications of map change detection and updating. It has also been successfully used in urban monitoring, forest changes, crisis monitoring, three-dimensional geographic information updating, construction progress monitoring and resource surveys. At the most basic level in these applications, the problem amounts to comparing raw sensor data, primarily 3D point clouds, 2D images, or a combination of both.
The second phase of HD map maintenance is to update map elements based on the results of change detection. Simply put, map updating is equivalent to a probabilistic data fusion problem. Continuously monitoring changes in an ever-changing environment in near real-time and fusing different data patterns in time and space, as well as updating multiple layers from different sources, is indeed a challenging task. Cadena et al. note in their survey paper that the distributed process of updating and maintaining high-definition maps created and used by large fleets of autonomous vehicles is a compelling topic for future research. In this direction, Kim et al. proposed a solution to keep new feature layers up-to-date from crowdsourced point cloud data. This new feature map forms the basis for building different semantic and geometric features for HD maps.
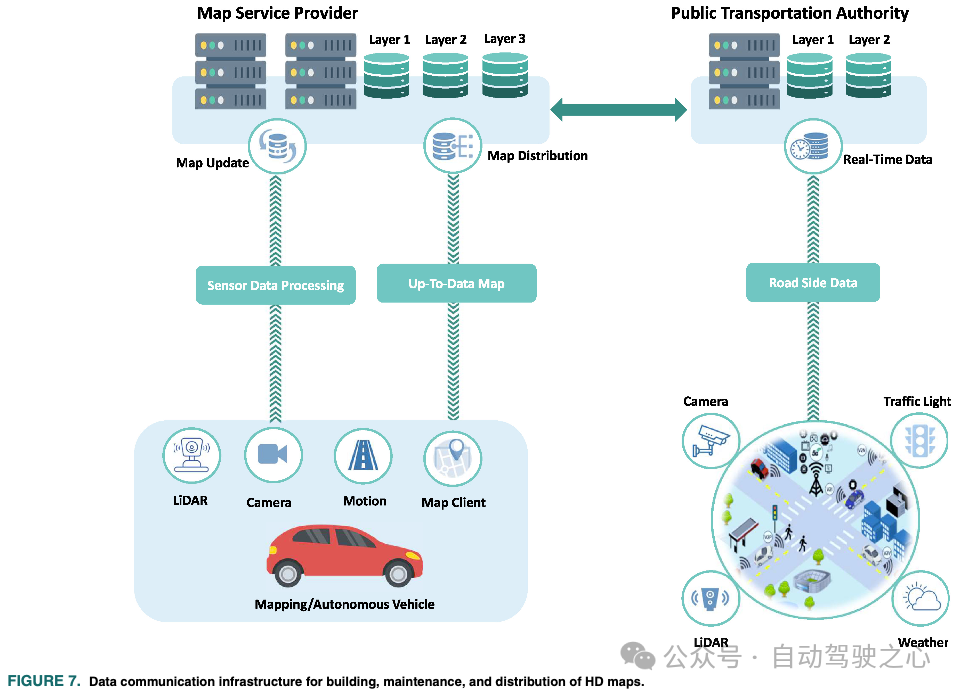
Building and maintaining HD maps at scale is a data exchange problem between multiple stakeholders, e.g., as an ITS Governments, map providers, and vehicles as roadside infrastructure owners, as shown in Figure 7. The collection, construction, maintenance, and distribution of map data require reliable communications and distributed computing infrastructure. This section discusses the data and communications infrastructure required to scale the creation, maintenance, and distribution of HD maps.
While CCAM has made significant progress over the past decade, achieving full vehicle autonomy still remains is an unresolved challenge. For autonomous vehicles to be deployed at scale, a scalable solution for HD mapping is critical. In this section, we shed light on the various challenges that need to be addressed to realize the full potential of HD map CCAM. There is no doubt that the availability of cost-effective and flexible solutions for building, maintaining and distributing map data among stakeholders will greatly enhance the scalability of CCAM in future generations of smart cities. Additionally, we discuss the future prospects and applications of HD maps.
HD mapping continues to be a rapidly growing aspect of real-world CCAM applications, driving innovation and advancement in the field. Although a large amount of research and development work has been carried out on the application of HD maps in AD systems and on the algorithms and infrastructure for building and maintaining HD maps, there is very little literature that can summarize and provide a foothold for these efforts. This paper provides an extensive review of previous work on building and maintaining HD maps, including cost-effective solutions, as well as communication and map data requirements from generation to distribution. Additionally, this article discusses current challenges in building and maintaining HD maps. More precisely, we provide an independent overview of the HD map as a context for the wider intelligent transportation systems community. We also discuss and analyze the latest technologies for using HD maps for various core functions in AD systems. Furthermore, we extensively discuss and review different approaches, methods, and algorithms for building HD maps at different levels and keeping them up-to-date. Finally, we shed some light on the future development of HD maps for next-generation mobile applications.
The above is the detailed content of Cloud-based and car-based MapNeXt is all done! Construction of next-generation online high-precision maps. For more information, please follow other related articles on the PHP Chinese website!














![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



