


Nat. Commun.: Robots imitate tadpoles and evolve to gain new skills!
A tadpole can only swim in water, but when it turns into a frog, it can have amphibious capabilities. The same robot cannot be good at many sports due to the limitations of its body shape. But robots can gain new skills through transformation.
Disadvantages of traditional transforming robots
However, traditional shape-changing robots have always relied on bulky external equipment, such as large motors and transmission mechanisms, thus limiting their flexibility and versatility. This is obviously different from animals in nature, which are driven by muscles and have rich sensing and control capabilities.
Recently, researchers from Yale University and Colorado State University published an innovative study in the world-famous journal "Nature Communications", which completely changed the way traditional robots deform. The researchers succeeded in embedding actuation, sensing and locking functions directly into the robot's internal structure, eliminating the need for cumbersome external hardware.
Principle
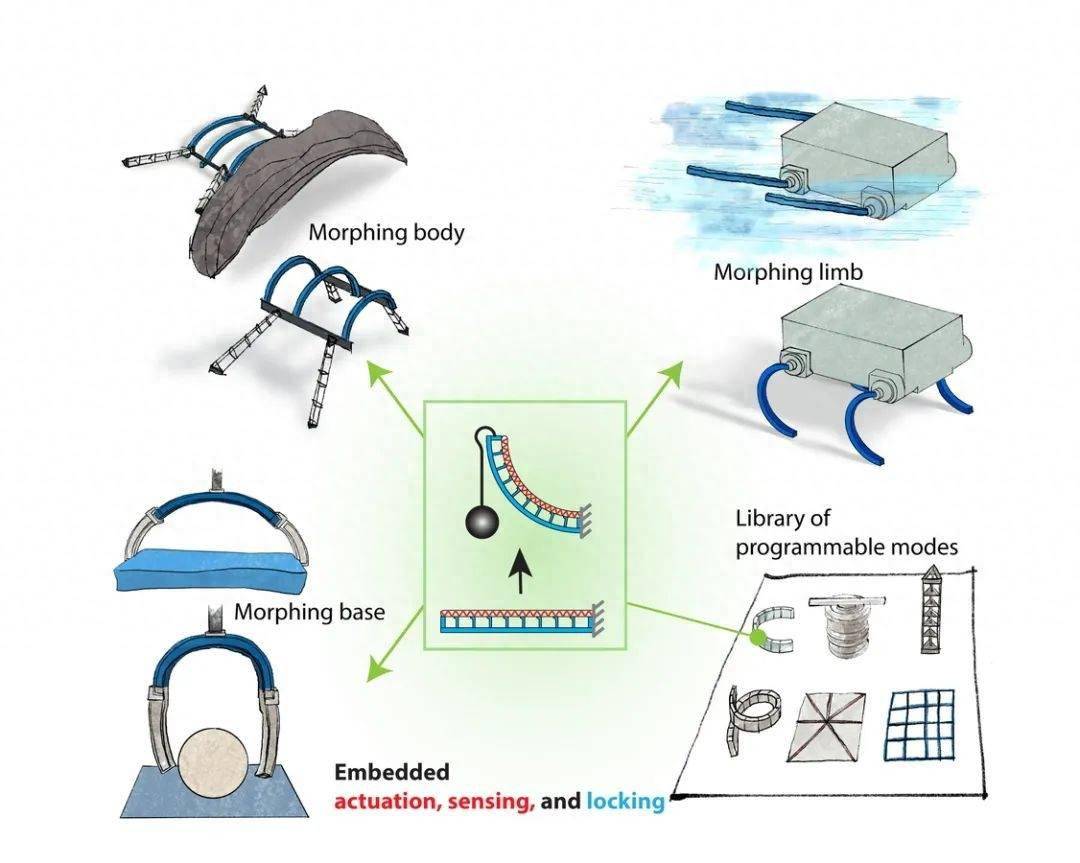
The core of this innovative technology is to combine lightweight artificial muscles with shape memory polymers (SMP). Artificial muscles can contract in response to an electric current, while SMPs can switch between rigid and soft states to lock the robot's shape. What is unique about this approach is that it fully embeds all these functions into the body of the robot without the need for complex mechanical structures and transmissions.
Like humans, this kind of robot can also be able to sense its own shape changes and achieve precise control.

Application
This embedded deformation technology has broad practical application prospects and is completely revolutionary. The research team has demonstrated the technology's versatility in a variety of robotic systems. For example, we demonstrated a gripper that adjusts the size of its skeleton based on the size of the object. In this way, the large jaws can clamp small shapes, and the small jaws can clamp large shapes
The self-sensing shape-changing gripper can adapt to different grasping tasks, and the quadruped robot can adjust its body shape according to the ground conditions. For example, you can crawl through a small gap, then change your body shape to stand up and walk faster. When you need to cross a smaller bridge, you can hold the bridge and climb over it

The robot can change the shape of its limbs when needed to adapt to different environments and tasks. For example, if a robot's legs change from straight to curved, it can climb ashore and move,
When the feet change from bent to straight, you can return to the water for swimming

Rewritten content as: Unlimited potential
In this research, one of the most striking results is the establishment of a set of embedded deformation module libraries that can achieve programmable shape changes, including twisting, three-dimensional bending and surface deformation. This library demonstrates embedded methods that enable robots to address a variety of challenges
The impact of this groundbreaking research will be far-reaching. Embedded morphological changes not only enhance the robot's ability to interact with its surrounding environment, but also bring new possibilities for applications in search and rescue, exploration, healthcare, and industrial automation. Robots can seamlessly switch between different forms and functions, which brings unprecedented versatility to the field of robotics
Please click the link below to view the paper:
The content that needs to be rewritten is: https://www.nature.com/articles/s41467-023-41708-6
The above is the detailed content of Nat. Commun.: Robot imitates tadpole evolution and acquires new skills!. For more information, please follow other related articles on the PHP Chinese website!
















![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



