


There are really too many tricks for robot dogs -
But today is still amazing .
The latest results from CMU allow dogs to directly learn:
High jump twice as long as , long jump, handstand and even Handstand Down the Stairs Without further ado, just show the picture to experience it:
 △ This is the long jump
△ This is the long jump
 △ This is a high jump
△ This is a high jump
 △ Handstand Sa Huaner
△ Handstand Sa Huaner
 Needs a heavy jump The content written is: △Handstand down the stairs
Needs a heavy jump The content written is: △Handstand down the stairs
I have to say, especially the "struggle" in the high jump part makes the dog particularly soulful.
In addition to these s operations, CMU also released several parkour videos,
completely autonomous.. It’s such a refreshing feeling to step on the ridge, pass through the gap, and cross the slope
 Even if there are some "mistakes" in the middle, It will not affect its immediate progress
Even if there are some "mistakes" in the middle, It will not affect its immediate progress
 Laughing Rat, and even arranged a
Laughing Rat, and even arranged a
stress test, and the result is of course "Passed"~
 The most amazing thing is that, according to CMU, all of the above extreme operations are completed by a single neural network
The most amazing thing is that, according to CMU, all of the above extreme operations are completed by a single neural network
After hearing this, Mr. LeCun had to give him a thumbs up.
How to refine such a soul? 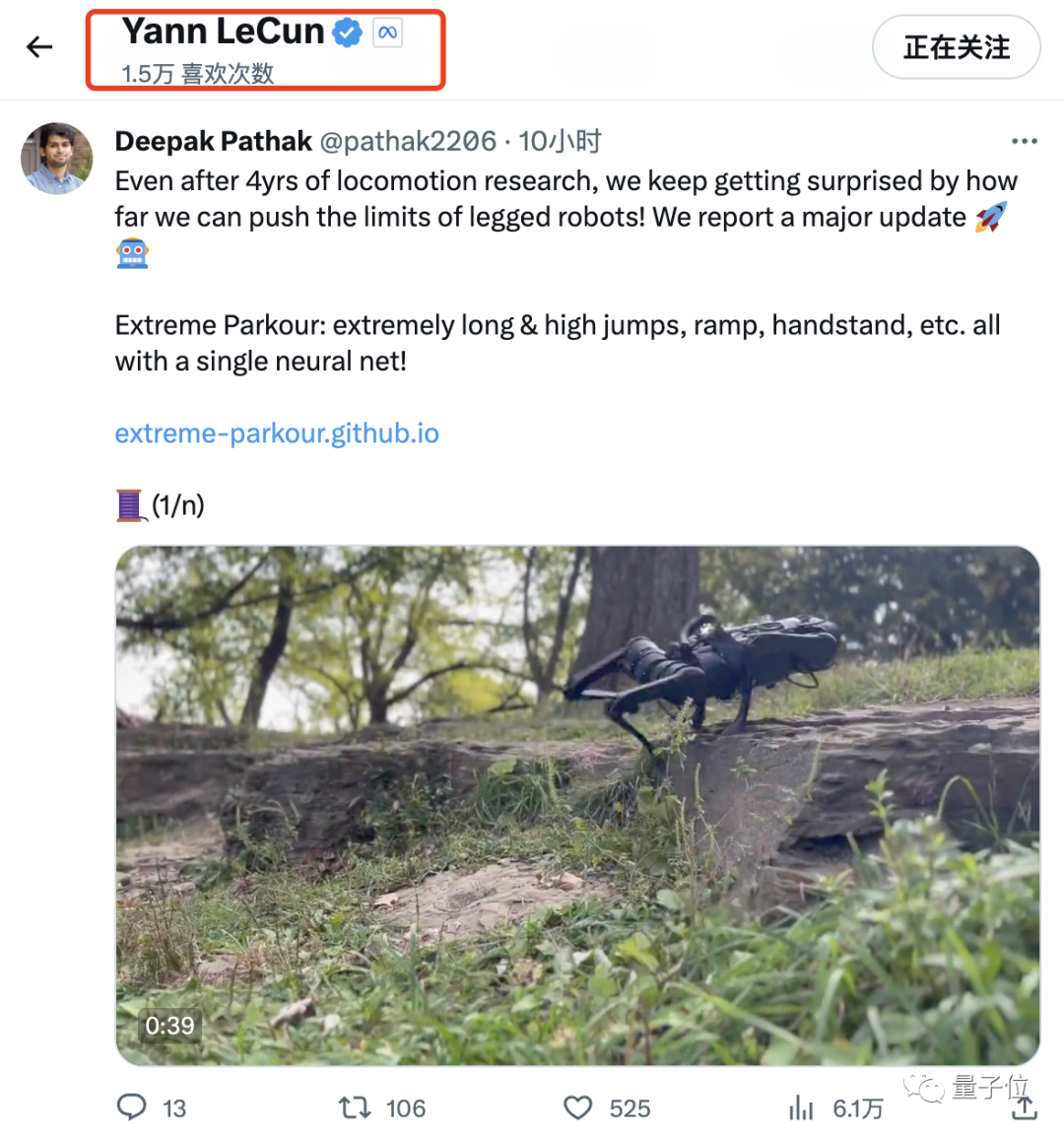
Achieve precise foot control and challenge to maximize mechanical advantage. Among them, Gym is used for simulator
Furthermore, handstand. Obviously, walking on two legs is much more difficult than walking on four However, Carnegie Mellon University's robot dog uses the same basic method to accomplish both tasks at the same time, and is even able to Stairs while maintaining an inverted stateThird, for parkour operations(the focus of this study)
, the robot dog must# through precise "eye muscle" coordination ##Decide the way forward by yourself instead of following human instructions. For example, when passing two slopes in succession, it needs to jump up the slope at a very specific angle and then immediately change direction
In order to learn CMU uses the MTS
MTS
(Mixed Teacher Student) system to teach the robot dog these correct directions. The system will only adopt it if the predicted direction is close to the true valueSpecifically, the system is divided into
two stages
: In the first stage, RL is first used to learn a movement strategy. This process can access some privileged information. In addition to environment parameters and scan points (scandots) , CMU also provides appropriate settings for the robot dog. Some
sign points(waypoints) are provided to guide the general direction.
Then, regularized online adaptation (Regularized Online Adaptation, ROA) is used to train the evaluator to recover environmental information from the observation history.
In the second stage, the strategy is extracted from the scan points (scandots) . The system will independently decide how to move forward based on the strategy and depth information, thus outputting motor commands quickly.
The whole process is like "teachers teach, students learn by analogy"
In addition to this system, because parkour requires a variety of different movements to cross obstacles, a specific design is designed for each obstacle. Reward function is also a headache.
Here, the author chose to formulate a unified and simple inner product reward function for all tasks.
It can automatically generate various rewards and can fully adapt to various terrain shapes

Without it, the dog’s performance would be poor It will look like this:

Finally, CMU also proposed a new dual distillation (dual distillation) method for extracting data from depth images Extract agile movement instructions and rapidly fluctuating forward direction.
Similarly, without it, the dog behaves like a drunkard:
After the above steps, the dog finally learned a brand new Is it exciting to be able to parkour independently and complete some difficult actions
? Don’t worry:
All of the above achievements have been made open source by CMU (look at the date, it’s still hot).
At the same time, this paper has also been released. You can get the
This research was completed by Carnegie Mellon University, and a total of four authors participated
Two of them are co-authors, and both are Chinese:
One is named Xuxin Cheng. This work was completed when he was a graduate student at CMU. He is now in California A doctoral student at the University of San Diego (UCSD) , the supervisor is Wang Xiaolong; the other
is Shi Kexin, a visiting scholar at the CMU Robotics Institute. She graduated from Xi'an Jiaotong University with a bachelor's degree.
Project homepage link: https://extreme-parkour.github.io/ (including links to papers, codes, etc.)
The above is the detailed content of CMU robot dog, standing upside down and going downstairs! Release is open source. For more information, please follow other related articles on the PHP Chinese website!
















![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



