


We'll explore the complexities of automating mobile home robots and focus on the unique challenges during setup to overcome limitations to ensure users have a smooth start

In a previous article, I explained how to use April Tag technology to automate home robots. A huge challenge when it comes to automating home robots or other robots is the setup of the device. In the world of devices, phones, and mobile apps, devices are typically connected to the host device via USB, and the device is always connected to a power source. However, for testing robots, a unique challenge arises, namely how to conduct testing while the robot is moving. Because it cannot be connected to the host device through a physical wired connection. So, how should we verify the unboxing experience? Don’t worry, I will explain this in this article
After I gave you a brief introduction to the various challenges of setup phase in Robot Automation Testing, let me go deeper Researching More Challenges
The robot is moving and cannot have a physical wired connection to the host device. It may be possible for some component level testing, but not for end-to-end (E2E) testing
The out-of-box experience is when the device is not connected to WiFi. How does the host device interact with the device when it is brand new? This is a very common situation in daily robot testing
When any error or exception occurs in the robot, recovery operations are required. The main goal of automated testing is to discover potential software and hardware problems with the robot. If we encounter a problem, how should we report and recover the device?
The robot's battery is about to run out and we need a reliable power source to charge the robot
It is very important to extend the same setup to multiple lab and home environments. This is because we can't just sign or test the bot in one environment. Let's address these issues in chronological order. It can be rewritten as: Let's solve these problems in chronological order
Using the Raspberry Pi Default Robot
Using Raspberry Pi Preset Robot
 Solving the Out of the Box Experience Use Case
Solving the Out of the Box Experience Use Case
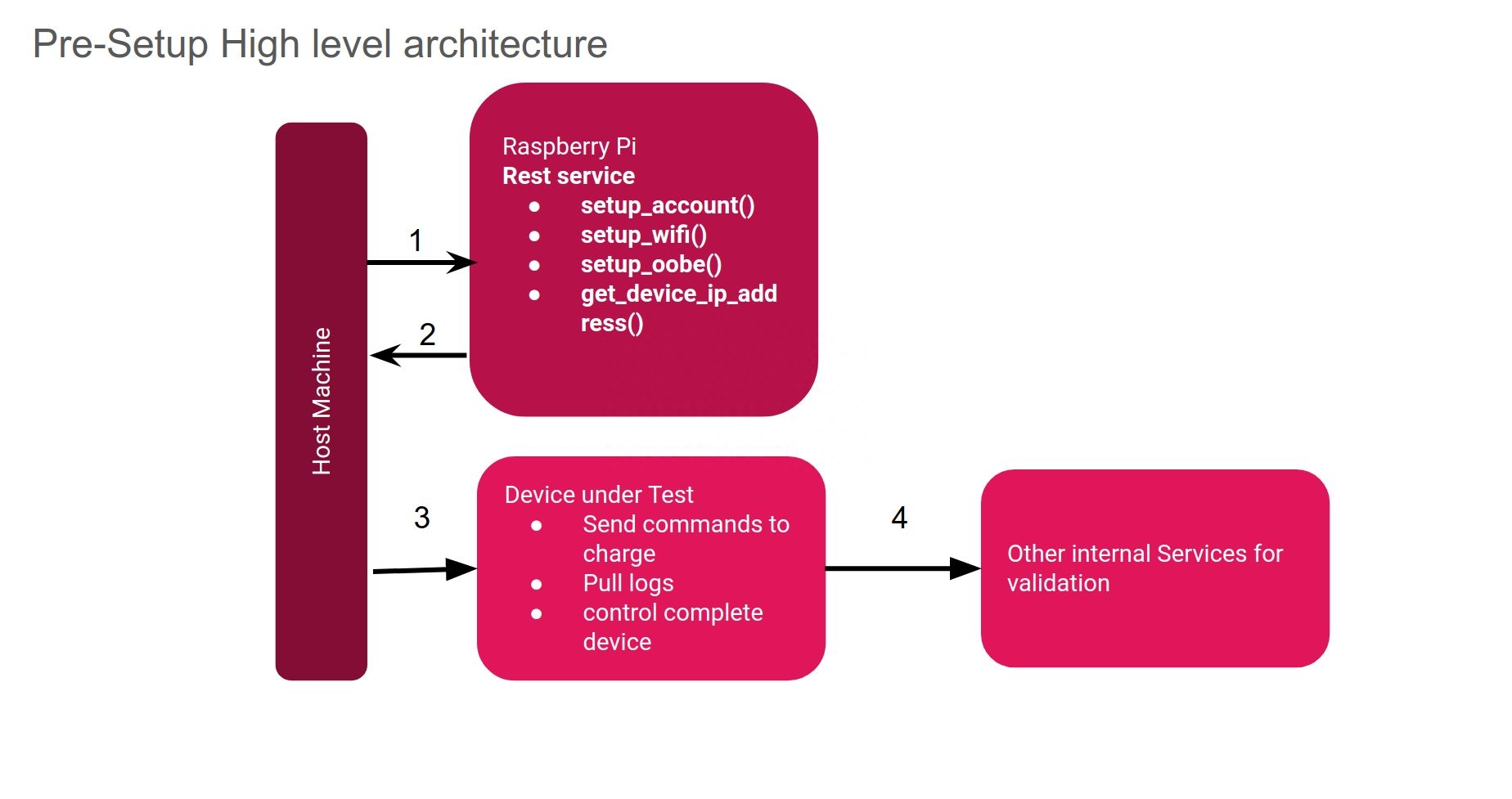
What is the role of RESTful services on the Raspberry Pi? What endpoints should a RESTful service contain?
Flash deviceRecover the robot in case of any errors or exceptions
Expand to multiple test environments
Extended setup tips for multiple test environments:
Keep the setup simple. Don’t overcomplicate or over-engineer the solution.Given the nature and complexity of the problems we face, a common question is whether there are alternatives. In short, the answer is yes. We can effectively test by using emulators/emulators to cover most of the use cases we describe, but there is no substitute for real device testing
The above is the detailed content of Addressing the Challenges of Mobile Robot Software Automation Testing. For more information, please follow other related articles on the PHP Chinese website!
















![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



