


Mit dem Aufkommen von BEV-Transformator-basierten Aufgaben ist auch die Abhängigkeit von Datenannotationen immer wichtiger geworden . Unabhängig davon, ob es sich um 2D-3D-Annotationen für gemeinsame Hindernisse, Fahrspurlinien basierend auf rekonstruierten Punktwolkenclips oder Annotationen für Belegungsaufgaben handelt, sind sie derzeit immer noch zu teuer (im Vergleich zu 2D-Annotationsaufgaben sind sie viel teurer). Natürlich gibt es in der Branche auch viele halbautomatische oder automatisierte Annotationsstudien basierend auf großen Modellen. Andererseits ist der Datenerfassungszyklus für autonomes Fahren zu lang und bringt eine Reihe von Problemen mit der Datenkonformität mit sich. Wenn Sie beispielsweise eine Szene aufnehmen möchten, in der ein Tieflader die Kamera überquert, oder eine Szene, in der sich die Anzahl der Fahrspuren in der Stadt von mehr auf weniger oder von weniger auf mehr ändert, benötigen Sie ein speziell für die Erstellung solcher Aufnahmen zuständiges Team eine Szene.
Das Konzept des Weltmodells deckt einen weiten Bereich ab und kann als Sensorsimulation betrachtet werden. Beim Tesla AI Day wurde ich zum ersten Mal Zeuge der disruptiven Auswirkungen der Simulationstechnologie auf die Datenannotation.
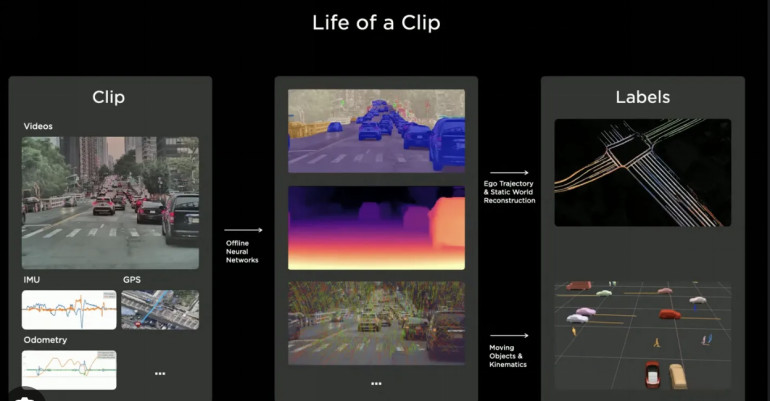
Abbildung 1: Teslas automatisierter Anmerkungseffekt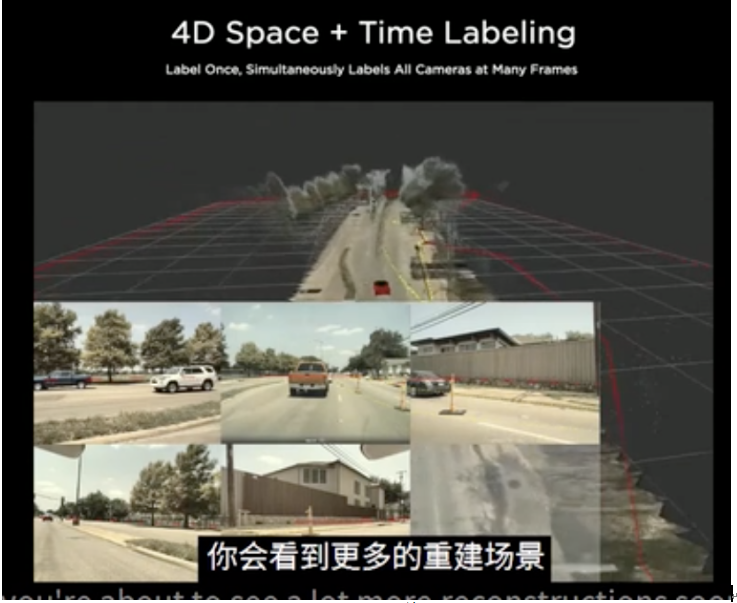 Abbildung 2 4D-Rekonstruktionseffekt
Abbildung 2 4D-Rekonstruktionseffekt
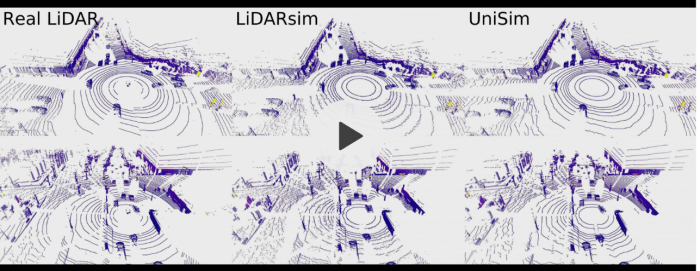
Als ich die Nachricht zum ersten Mal sah, war ich sehr überrascht, als hätte ich eine Besonderheit entdeckt, die die Tradition der Tesla-Elektroautos untergräbt. Da immer mehr Forscher in diesem Bereich investieren, sehen wir viele hervorragende Forschungsergebnisse. Das autonome Fahrsimulationssystem von UniSim verfügt über Funktionen wie Wiedergabe, dynamische Objektverhaltenssteuerung und Freiansicht-Rendering. Diese Funktionen sind für jeden Modellforscher, der trainiert, sehr wünschenswert.

Sie können auch Lidar simulieren.
Weitere Informationen finden Sie unter: https://zhuanlan.zhihu.com/p/636695025. Es gibt weitere ähnliche Studien in diese Richtung.
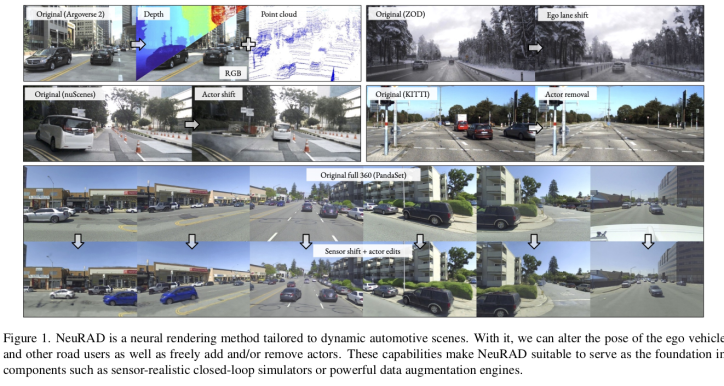
NeuRAD: Neuronales Rendering für autonomes Fahren
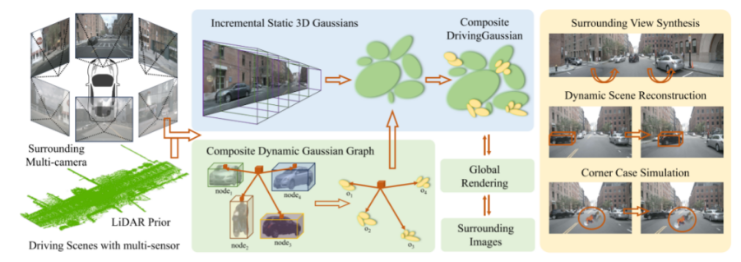
DrivingGaussian: Zusammengesetztes Gaußsches Splatting für umgebende dynamische autonome Fahrszenen. Die meisten der oben genannten Methoden beziehen sich auf Nerf, und die gesamte Pipeline ist relativ umfangreich. Es gibt eine andere Richtung, eine Forschungsrichtung, die auf Diffusion basiert. Es wurden auch gute Untersuchungen durchgeführt.
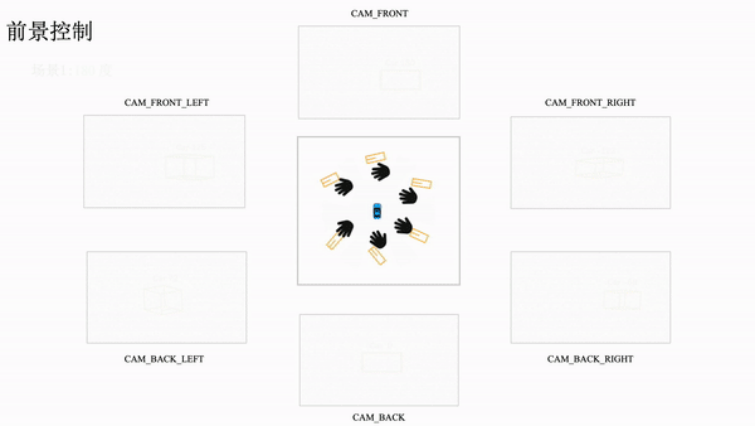
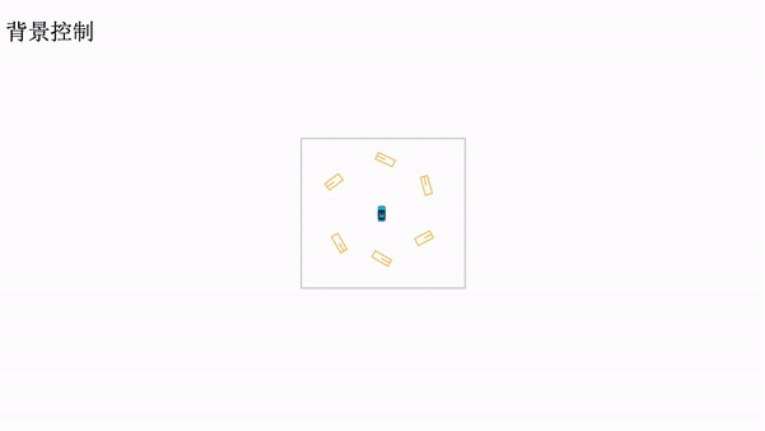
BEVControl: Präzise Steuerung von Street-View-Elementen mit multiperspektivischer Konsistenz über BEV-Skizzen-Layout
Das obige ist der detaillierte Inhalt vonWird die Annotationsbranche für autonomes Fahren im Jahr 2024 durch das Weltmodell untergraben?. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
 Wie man unter Linux mit verstümmelten chinesischen Schriftzeichen umgeht
Wie man unter Linux mit verstümmelten chinesischen Schriftzeichen umgeht
 Empfohlene Reihenfolge zum Erlernen von C++ und der C-Sprache
Empfohlene Reihenfolge zum Erlernen von C++ und der C-Sprache
 So lösen Sie verstümmelte Zeichen in PHP
So lösen Sie verstümmelte Zeichen in PHP
 Methode zur Reparatur von Datenbankzweifeln
Methode zur Reparatur von Datenbankzweifeln
 Timeout-Lösung für Serveranfragen
Timeout-Lösung für Serveranfragen
 IIS unerwarteter Fehler 0x8ffe2740 Lösung
IIS unerwarteter Fehler 0x8ffe2740 Lösung
 navigator.useragent
navigator.useragent
 So erhalten Sie ein Token
So erhalten Sie ein Token








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



