


Überdenken der Open-Loop-Bewertung des durchgängigen autonomen Fahrens in nuScenes
Schlüsselwörter: End-to-End-Autonomes Fahren, nuScenes-Open-Loop-Bewertung
Bestehende autonome Fahrsysteme sind normalerweise in drei Hauptaufgaben unterteilt: Wahrnehmung, Vorhersage und Planung; die Planungsaufgabe umfasst die Vorhersage der Flugbahn des Fahrzeugs auf der Grundlage interner Absichten und der externen Umgebung sowie die Steuerung des Fahrzeugs. Die meisten vorhandenen Lösungen bewerten ihre Methoden anhand des nuScenes-Datensatzes. Die Bewertungsindikatoren sind L2-Fehler und Kollisionsrate. In diesem Artikel werden die vorhandenen Bewertungsindikatoren neu bewertet, um zu untersuchen, ob sie die Überlegenheit verschiedener Methoden genau messen können. In diesem Artikel wurde auch eine MLP-basierte Methode entwickelt, die rohe Sensordaten (historische Flugbahn, Geschwindigkeit usw.) als Eingabe verwendet und die zukünftige Flugbahn des Fahrzeugs direkt ausgibt, ohne Wahrnehmungs- und Vorhersageinformationen wie Kamerabilder oder LiDAR zu verwenden. Überraschenderweise: Eine so einfache Methode erreicht die SOTA-Planungsleistung für den nuScenes-Datensatz und reduziert den L2-Fehler um 30 %. Unsere weitere eingehende Analyse liefert einige neue Erkenntnisse zu Faktoren, die für Planungsaufgaben auf dem nuScenes-Datensatz wichtig sind. Unsere Beobachtungen legen auch nahe, dass wir das Open-Loop-Bewertungsschema für durchgängiges autonomes Fahren in nuScenes überdenken müssen. 2. Zweck, Beitrag und Schlussfolgerung des Artikels Es werden erweiterte Befehle verwendet (insgesamt 21-dimensionale Vektoren), die als Eingabe verwendet werden können, um Plannings SOTA auf nuScenes zu erreichen. Der Autor wies daher auf die Unzuverlässigkeit der Open-Loop-Auswertung auf nuScenes hin und lieferte zwei Analysen: Die Fahrzeugtrajektorie im nuScenes-Datensatz verläuft tendenziell gerade oder weist eine sehr geringe Krümmung auf; die Erkennung der Kollisionsrate hängt mit der Gitterdichte zusammen , und Die Kollisionsanmerkung des Datensatzes ist ebenfalls verrauscht und die aktuelle Methode zur Bewertung der Kollisionsrate ist nicht robust und genau genug;
Bestehende autonome Fahrmodelle beinhalten viele unabhängige Aufgaben wie Wahrnehmung, Vorhersage und Planung. Dieses Design vereinfacht die Schwierigkeit des teamübergreifenden Schreibens, führt jedoch aufgrund der Unabhängigkeit der Optimierung und Schulung jeder Aufgabe auch zu Informationsverlust und Fehleranhäufung im gesamten System. Es werden End-to-End-Methoden vorgeschlagen, die vom Erlernen der räumlich-zeitlichen Merkmale des eigenen Fahrzeugs und der Umgebung profitieren.Übersicht über die Modellstruktur
Modell Die Eingabe besteht aus zwei Teilen: dem eigenen Fahrzeugstatus und übergeordneten Befehlen, die zukünftige kurzfristige Bewegungstrends darstellen. Status des eigenen Fahrzeugs: erfasst die Vergangenheit
=4 Bilder der Bewegungsbahn, der momentanen Geschwindigkeit und Beschleunigung des eigenen Fahrzeugs
Netzwerkstruktur: Das Netzwerk ist ein einfaches dreischichtiges MLP (die Eingabe-zu-Ausgabe-Abmessungen betragen jeweils 21-512-512-18), die endgültige Anzahl der Ausgaberahmen = 6, jeder Rahmen gibt die Flugbahnposition des Fahrzeugs aus (x-, y-Koordinate) und Kurswinkel (Kurswinkel)
Verlustfunktion
Verlustfunktion: L1-Verlustfunktion für Strafe verwenden
Datensatz : Experimente mit dem nuScenes-Datensatz, der aus 1.000 Szenen und etwa 40.000 Keyframes besteht, die hauptsächlich in Boston und Singapur mit Fahrzeugen gesammelt wurden, die mit LiDAR und Umfangskameras ausgestattet sind. Zu den für jedes Bild gesammelten Daten gehören Camear-Bilder mit mehreren Ansichten, LiDAR, Geschwindigkeit, Beschleunigung und mehr.
Bewertungsmetriken: Verwenden Sie den Bewertungscode des ST-P3-Papiers (https://github.com/OpenPerceptionX/ST-P3/blob/main/stp3/metrics.py). Bewerten Sie Ausgabespuren für Zeitbereiche von 1 s, 2 s und 3 s. Um die Qualität der vorhergesagten Flugbahn des eigenen Fahrzeugs zu bewerten, werden zwei häufig verwendete Indikatoren berechnet:
L2-Fehler: in Metern, berechnet zwischen der vorhergesagten Flugbahn des eigenen Fahrzeugs und der tatsächlichen Flugbahn in den nächsten 1 Sekunden, 2 Sekunden und 3 Sekunden Bereich bzw. Durchschnittlicher L2-Fehler;
Kollisionsrate: in Prozent. Um zu bestimmen, wie oft das eigene Fahrzeug mit anderen Objekten kollidiert, werden Kollisionen berechnet, indem an jedem Wegpunkt der vorhergesagten Flugbahn ein Kästchen platziert wird, das das eigene Fahrzeug darstellt, und dann ermittelt wird, ob es zu einer Kollision mit den Begrenzungsrahmen von Fahrzeugen und Fußgängern in der Flugbahn kommt aktuelle Szene.
Hyperparameter-Einstellungen und Hardware: PaddlePaddle- und PyTorch-Framework, AdamW-Optimierer (4e-6 lr und 1e-2 Gewichtsabfall), Cosinus-Scheduler, trainiert für 6 Epochen, Batch-Größe ist 4 und es wird ein V100 verwendet
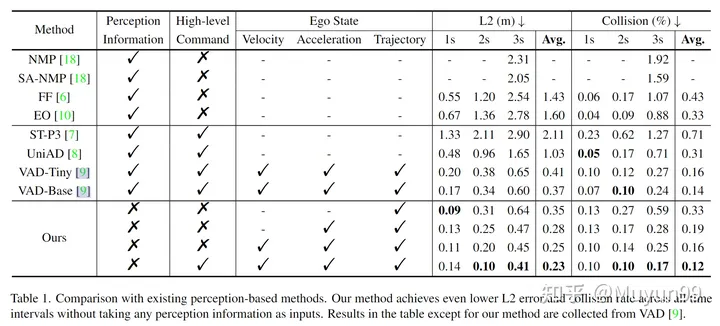
Tabelle 1 Vergleich mit vorhandenen wahrnehmungsbasierten Methoden
In Tabelle 1 wurden einige Ablationsexperimente durchgeführt. Um den Einfluss von Geschwindigkeit, Beschleunigung, Flugbahn und High-Level-Befehl auf die Leistung des Modells dieses Artikels zu analysieren. Überraschenderweise erzielt unser Basismodell bereits einen geringeren durchschnittlichen L2-Fehler als alle vorhandenen Methoden, da es nur Trajektorien als Eingabe und keine Wahrnehmungsinformationen verwendet.
Wenn wir der Eingabe schrittweise Beschleunigung, Geschwindigkeit und High-Level-Befehl hinzufügen, sinken der durchschnittliche L2-Fehler und die Kollisionsrate von 0,35 m auf 0,23 m und von 0,33 % auf 0,12 %. Das Modell, das sowohl Ego State als auch High-Level Command als Eingabe verwendet, erreicht die niedrigste L2-Fehler- und Kollisionsrate und übertrifft alle bisherigen hochmodernen wahrnehmungsbasierten Methoden, wie in der letzten Zeile gezeigt.
Der Artikel analysiert die Verteilung des eigenen Fahrzeugstatus im nuScenes-Trainingssatz aus zwei Perspektiven: Flugbahnpunkte in den nächsten 3 Sekunden;
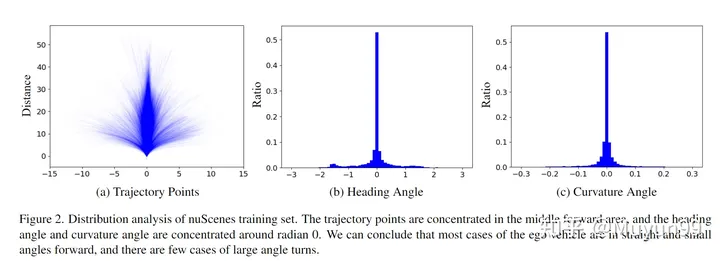
nuScenes Verteilungsanalyse des Trainingssatzes.
Alle zukünftigen 3s-Trajektorienpunkte im Trainingssatz sind in Abbildung 2(a) dargestellt. Wie aus der Abbildung ersichtlich ist, konzentriert sich die Flugbahn hauptsächlich auf den mittleren Teil (gerade) und ist hauptsächlich eine gerade Linie oder eine Kurve mit sehr geringer Krümmung.
Der Kurswinkel stellt die zukünftige Fahrtrichtung relativ zur aktuellen Zeit dar, während der Krümmungswinkel die Wendegeschwindigkeit des Fahrzeugs widerspiegelt. Wie in Abbildung 2 (b) und (c) dargestellt, liegen fast 70 % der Kurs- und Krümmungswinkel im Bereich von -0,2 bis 0,2 bzw. -0,02 bis 0,02 Bogenmaß. Dieser Befund steht im Einklang mit den Schlussfolgerungen, die aus der Flugbahnpunktverteilung gezogen werden.
Basierend auf der obigen Analyse der Verteilung von Flugbahnpunkten, Kurswinkeln und Krümmungswinkeln geht dieser Artikel davon aus, dass das eigene Fahrzeug im nuScenes-Trainingssatz dazu neigt, sich beim Fahren innerhalb des nuScenes-Trainingssatzes geradlinig und in einem kleinen Winkel vorwärts zu bewegen eine kurze Zeitspanne.
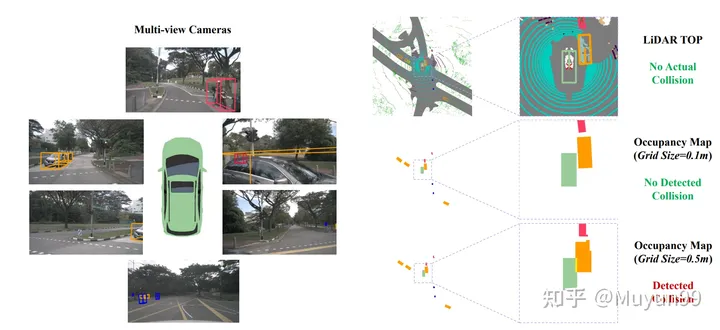
Die unterschiedlichen Rastergrößen der Belegungskarte führen zu Kollisionen in den GT-Trajektorien.
Bei der Berechnung der Kollisionsrate besteht eine gängige Praxis bei bestehenden Methoden darin, Objekte wie Fahrzeuge und Fußgänger in die Vogelperspektive (BEV) zu projizieren ) Platz und wandeln Sie sie dann in belegte Bereiche im Diagramm um. Und hier geht die Genauigkeit verloren. Wir haben festgestellt, dass ein kleiner Teil der GT-Trajektorienproben (etwa 2 %) sich auch mit Hindernissen im Belegungsraster überlappten, aber das Selbstauto kollidierte beim Sammeln tatsächlich nicht mit irgendetwas anderem data , was dazu führt, dass Kollisionen falsch erkannt werden. Verursacht falsche Kollisionen, wenn sich das Ego-Fahrzeug in der Nähe bestimmter Objekte befindet, z. B. kleiner als die Größe eines einzelnen Belegungskartenpixels.
Abbildung 3 zeigt ein Beispiel dieses Phänomens zusammen mit Kollisionserkennungsergebnissen für Ground-Truth-Trajektorien mit zwei unterschiedlichen Gittergrößen. Orange sind Fahrzeuge, die fälschlicherweise als Kollisionen erkannt werden könnten. Bei der kleineren Gittergröße (0,1 m), die in der unteren rechten Ecke angezeigt wird, identifiziert das Auswertungssystem die GT-Trajektorie korrekt als nicht kollidierend, bei der größeren Gittergröße unten rechts jedoch Ecke (0,5 m) kommt es zu einer falschen Kollisionserkennung.
Nachdem wir den Einfluss der besetzten Gittergröße auf die Erkennung von Flugbahnkollisionen beobachtet hatten, testeten wir eine Gittergröße von 0,6 m. Der nuScenes-Trainingssatz hat 4,8 % Kollisionsproben, während der Validierungssatz 3,0 % hat. Es ist erwähnenswert, dass bei der vorherigen Verwendung einer Gittergröße von 0,5 m nur 2,0 % der Stichproben im Validierungssatz fälschlicherweise als Kollisionen klassifiziert wurden. Dies zeigt einmal mehr, dass aktuelle Methoden zur Schätzung von Kollisionsraten nicht robust und genau genug sind.
Zusammenfassung des Autors: Der Hauptzweck dieses Papiers besteht darin, unsere Beobachtungen darzustellen und nicht, ein neues Modell vorzuschlagen. Obwohl unser Modell im nuScenes-Datensatz gut funktioniert, erkennen wir an, dass es sich um ein unpraktisches Spielzeug handelt, das in der realen Welt nicht verwendet werden kann. Fahren ohne eigenen Fahrzeugstatus ist eine unüberwindbare Herausforderung. Dennoch hoffen wir, dass unsere Erkenntnisse die weitere Forschung in diesem Bereich anregen und eine Neubewertung der Fortschritte beim durchgängig autonomen Fahren ermöglichen werden.
Dieser Artikel ist ein ausführlicher Überblick über die aktuelle End-to-End-Bewertung des autonomen Fahrens im nuScenes-Datensatz. Unabhängig davon, ob es sich um eine implizite End-to-End-Direktausgabe von Planungssignalen oder eine explizite End-to-End-Ausgabe mit Zwischenverbindungen handelt, handelt es sich bei vielen davon um Planungsindikatoren, die anhand des nuScenes-Datensatzes ausgewertet werden. In Baidus Artikel wurde auf diese Art der Auswertung hingewiesen ist nicht zuverlässig. Diese Art von Artikel ist eigentlich sehr interessant, wenn er veröffentlicht wird, aber er fördert auch aktiv die Weiterentwicklung der Branche. Vielleicht ist keine umfassende Planung erforderlich Ende-zu-Ende), vielleicht jeder. Die Durchführung weiterer Closed-Loop-Tests (CARLA-Simulator usw.) bei der Leistungsbewertung kann den Fortschritt der autonomen Fahrgemeinschaft besser fördern und das Papier in tatsächliche Fahrzeuge umsetzen. Der Weg zum autonomen Fahren hat noch einen langen Weg vor sich
Das obige ist der detaillierte Inhalt vonWird die End-to-End-Technologie im Bereich des autonomen Fahrens Frameworks wie Apollo und Autoware ersetzen?. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
 Wie hoch wird Ethereum steigen?
Wie hoch wird Ethereum steigen?
 So konfigurieren Sie die Pfadumgebungsvariable in Java
So konfigurieren Sie die Pfadumgebungsvariable in Java
 Erstellen Sie einen Internetserver
Erstellen Sie einen Internetserver
 Vue verweist auf JS-Dateien
Vue verweist auf JS-Dateien
 0x80070057 Fehlerlösung
0x80070057 Fehlerlösung
 So erstellen Sie Diagramme und Datenanalysediagramme in PPT
So erstellen Sie Diagramme und Datenanalysediagramme in PPT
 So beantragen Sie eine geschäftliche E-Mail-Adresse
So beantragen Sie eine geschäftliche E-Mail-Adresse
 Implementierungsmethode für die Python-Online-Wiedergabefunktion
Implementierungsmethode für die Python-Online-Wiedergabefunktion








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



