


Die
DARPA (U.S. Defense Advanced Research Projects Agency) Robot Challenge (DRC) findet alle zwei Jahre statt und wird vom US-Verteidigungsministerium gesponsert. Ziel des Wettbewerbs ist es, Roboter auszuwählen, die Verantwortung für Gefahren wie die Atomkraft von Fukushima übernehmen können Für Menschen unzugängliche Anlagen. Roboter für Erste-Hilfe-Einsätze vor Ort.
Bei der DRC DARPA Robot Challenge 2015 verließ sich der Roboter DRC-HUBO aus Südkorea auf seine „einzigartigen Fähigkeiten“, um 22 andere Top-Roboter aus 5 Ländern zu besiegen und gewann die Meisterschaft, darunter viele Roboter, die damals von Boston Dynamics entwickelt wurden Sternroboter wie Atlas und Japan HRP.
DRC-HUBO ist ein Roboter, der sowohl stehen als auch knien kann
Im Bereich der Robotik war das Gehgleichgewicht schon immer eine unüberwindbare Lücke. Dies ist auch der Schlüssel zum endgültigen Sieg von HUBO – Die an seinen Knien und Knöcheln installierten Räder ermöglichen es dem Roboter, vom Gehmodus zur Bewegung auf Rädern zu wechseln. Das „KAIST“-Team, das es entwickelt hat, gewann damals auch einen Hauptpreis von 2 Millionen US-Dollar.
Erkundung und Rettung in gefährlichen Umgebungen sind wichtige Anwendungen der Roboterbeinbewegung. Von Robotern, die zur Katastrophenrettung oder Felderkundung eingesetzt werden, wird häufig die Fähigkeit verlangt, sich schnell auf ebenen Straßen fortzubewegen und sich an komplexes Gelände anzupassen. Basierend auf diesem Problem entwickelte ein Team des State Key Laboratory of Robotics and Systems, School of Mechanical and Electrical Engineering, Harbin Institute of Technology, ein äußerst manövrierfähiges und äußerst anpassungsfähiges, hydraulisch angetriebenes, autonomes Robotersystem mit Radbeinen – den WLR-3P-Roboter. Der Roboter kann sich auf ebenen Straßen schnell und effizient bewegen und ist in rauem Gelände hervorragend anpassungsfähig.
Diese Forschung wurde unter dem Titel des Artikels (Design and Control for WLR-3P: A Hydraulic Wheel-Legged Robot) in Cyborg and Bionic Systems, einer neuen Ausgabe des China Science and Technology Journal Excellence Action Plan High Starting Point, veröffentlicht.
▍Enthüllung des Geheimnisses des WLR-3P-Roboters
Werfen wir zunächst einen Blick darauf, wie WLR-3P aussieht:

neuer schlauchloser hydraulischer Radbeinroboter ist WLR-3P in der Lage, mit autonomer Kraft schnell zu springen und sich zu bewegen.
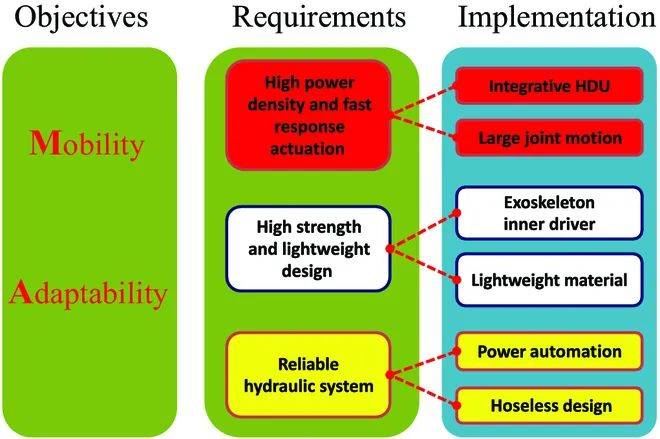
Wie verbessern Forscher also dieMobilität und Umweltanpassungsfähigkeit von Robotern? Hauptsächlich auf diese drei Punkte angewiesen: (a) hohe Leistungsdichte und schneller Reaktionsantrieb, (b) geringes Gewicht, große Trägheit und hohe Festigkeit, (c) zuverlässiges Hydrauliksystem.
 Die mechanische Entwurfsmethode von WLR-3P kann neu geschrieben werden
Die mechanische Entwurfsmethode von WLR-3P kann neu geschrieben werden
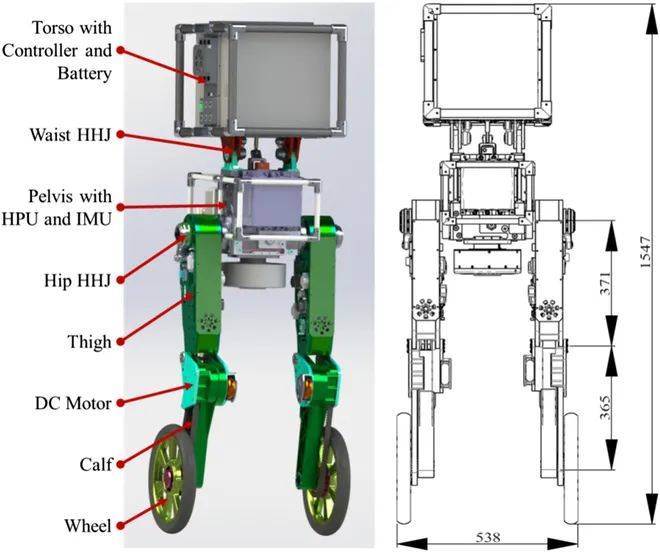 Komponentenzusammensetzung und Abmessungen von WLR-3P
Komponentenzusammensetzung und Abmessungen von WLR-3P
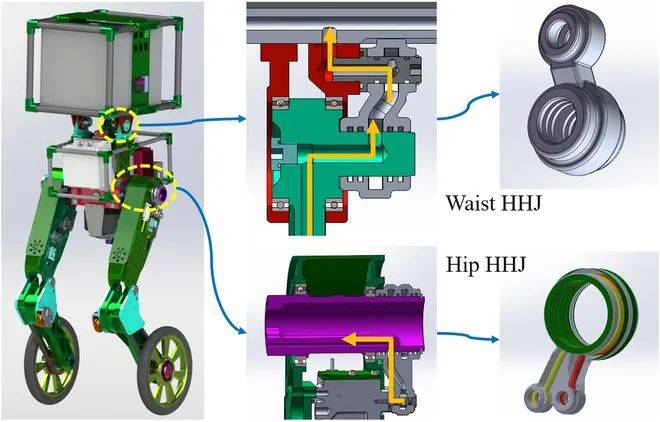
Wie im Bild oben gezeigt, verfügt der WLR-3P über 7 Freiheitsgrade (DOF): 3 DOF für jedes Bein und 1 DOF an der Taille. Die drei Freiheitsgrade des Beins liegen jeweils am Hüftgelenk, am Kniegelenk und am Antriebsrad. Das Hüftgelenk und das Kniegelenk werden von HDU angetrieben, und das Antriebsrad wird von einem Gleichstrommotor angetrieben.
HDU umfasst einen maßgeschneiderten Hochfrequenz-Servozylinder (20 Hz), ein Hochleistungs-Servoventil, einen Wegsensor und einen Kraftsensor. Der WLR-3P wiegt 80 kg und wird mit einer integrierten HPU und Batterie geliefert. Die maximale Höhe beträgt 1,55 Meter und der Abstand zwischen den beiden Rädern beträgt ca. 0,54 Meter. Darüber hinaus „trägt“ der Roboter aus Sicherheitsgründen auch einen 1,8 kg schweren Rahmen aus einer Kohlefaser-Hybrid-Aluminiumlegierung
Warum sollte man sich für Hydraulik entscheiden? Um es einfach und grob auszudrücken:
Ein Roboter mit einer integrierten hydraulischen Antriebsvorrichtung verfügt über eine hohe Leistungsdichte und eine schnelle Antriebsreaktion.▍WLR-3Ps fortschrittliche Design- und Steuerungsstrategie
Die Forscher berücksichtigten die folgenden Faktoren: (a) hohes Leistungsgewicht, (b) ausgezeichnete Schlagfestigkeit, (c) Hochfrequenzreaktion zur Kraft-/Positionskontrolle und (d) biologische Eigenschaften, die mit denen des Menschen vergleichbar sind.
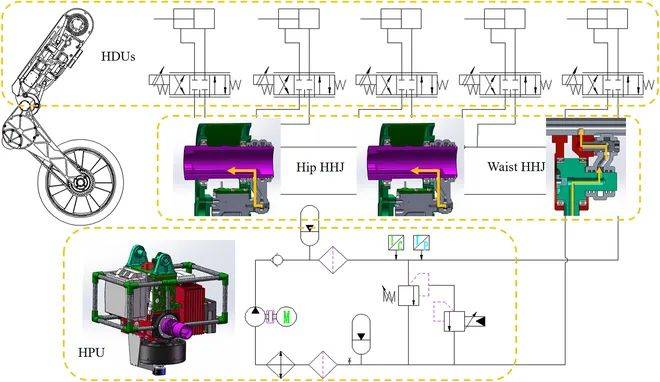
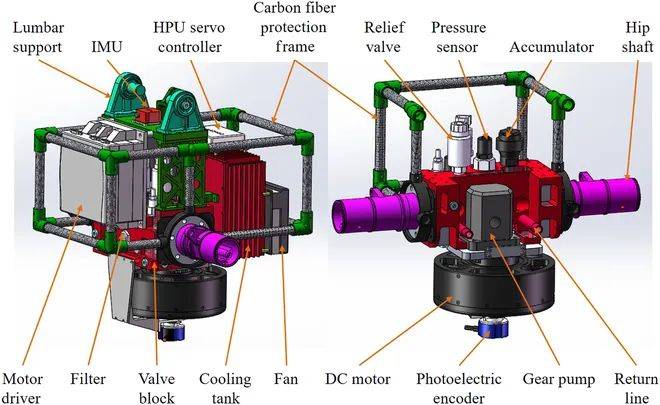
Die maximale Leistungsdichte der Kniegelenk-Hydraulikantriebseinheit (HDU) im WLR-3P kann etwa 7 kW/kg erreichen, was viel höher ist als bei herkömmlichen Motoren. Umgeschriebener Inhalt: Die maximale Leistungsdichte der Kniehydraulik-Antriebseinheit (HDU) im WLR-3P beträgt ca. 7 kW/kg und liegt damit weit über der von herkömmlichen MotorenWLR-3P Hüfte und Taille HHJ Die Miniaturisierung und Integration hydraulischer Aggregate (HPU) sind die Hauptschwierigkeiten im Bereich der hydraulischen Roboterforschung, vor allem aufgrund der Miniaturisierung von Pumpen und Motoren sowie der Systemheizung. Da WLR-3P keinen großen HPU-Installationsraum hat. Das Forschungs- und Entwicklungspersonal hat eine innovative Designidee vorgeschlagen, um eine Miniaturisierung und Integration der HPU zu erreichen. Zunächst wird die Zahnradpumpe über eine Mikrokupplung von einem speziell angefertigten Außenläufermotor angetrieben. Hochdrucköl von der Pumpe fließt durch einen Mikrospeicher und Filter, um die vom System benötigte Hydraulikleistung bereitzustellen. Zweitens wurde zur Lösung des Heizproblems des Systems ein multifunktionaler Kraftstofftank entwickelt, der Wärmeableitung, Filterung und Spannungsstabilisierung integriert. Schließlich kann die HPU hydraulische Leistung mit einem maximalen Druck von 21 MPa und einer Durchflussrate von 20 l/min abgeben.
Die Miniaturisierung und Integration von HPU befreit den Roboter von den Einschränkungen durch Gummischläuche und macht die Bewegung des Roboters „seidiger“.
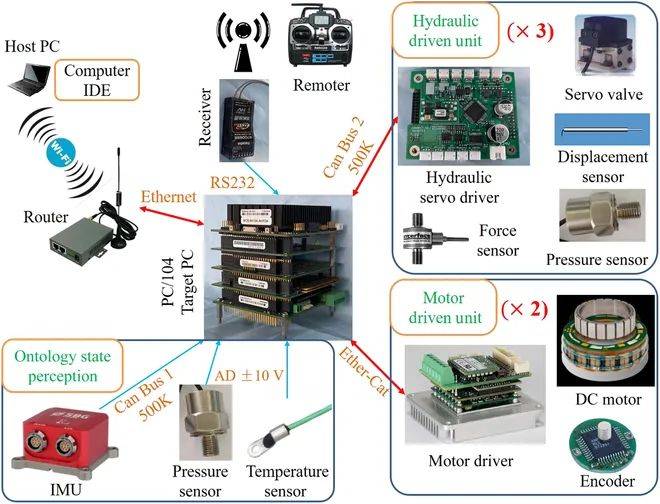
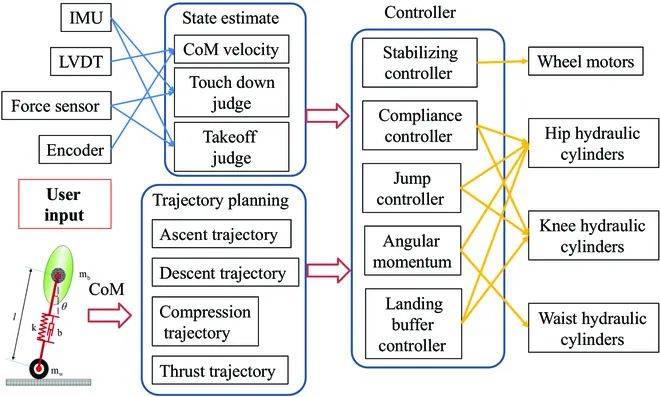
ein Steuerungssystem vor, das ein hierarchisch verteiltes elektrisches System und eine Steuerungsstrategie umfasst:
Der Inhalt, der neu geschrieben werden muss, ist: ▍Gleichgewichts- und Sprengkrafttests von WLR-3P
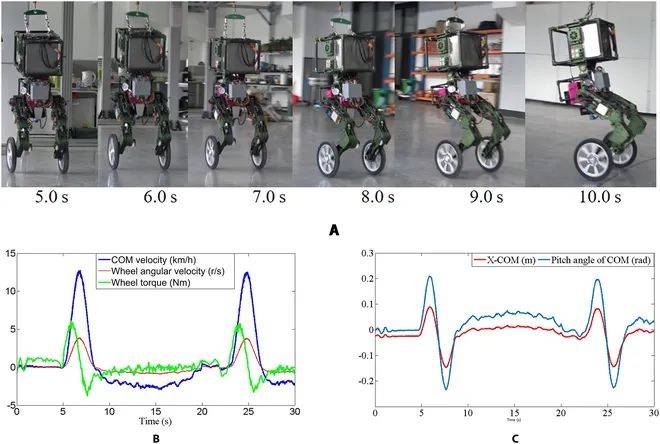
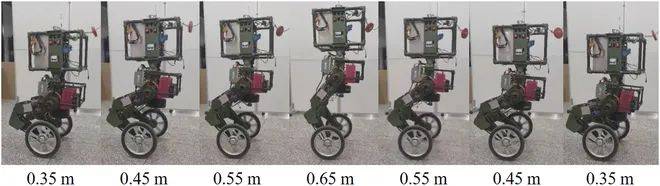
Schnelle Bewegungen und Hocken sind die grundlegendsten Aktionen, um die Gleichgewichtsleistung des Roboters auf Rädern zu überprüfen. Bei schnellen Bewegungen ändert sich der Schwerpunkt (COM) des Roboters schnell in horizontaler Richtung, während er sich beim Hocken schnell in vertikaler Richtung ändert.
Schneller Mobiltest COM Squat-Schnappschüsse im 0,35 und 0,65 m Höhenbereich
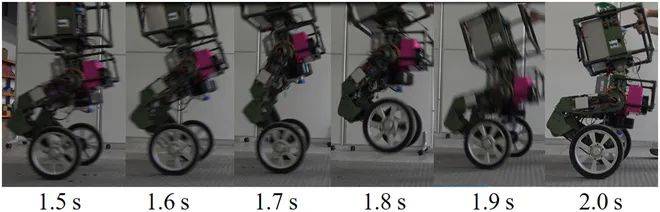
WLR-3P kann Start, Flug und Landung in 0,5 Sekunden abschließen Experimentelle Ergebnisse zeigen, dass der Roboter WLR-3P eine Geschwindigkeit von 13,6 km/h und eine Sprunghöhe von 0,2 m erreichen kann. Der hydraulische Antrieb und die strukturellen Einstellungen des Roboters sind vollständig zertifiziert.
Forscher fassten ihre experimentellen Erfahrungen zusammen und fanden heraus, dass
Der Inhalt, der neu geschrieben werden muss, ist: ▍Die beiden „Brüder“ von WLR-3P
Das Team gab an, dass zwar immer noch eine gewisse Lücke zwischen der tatsächlichen Leistung und der theoretischen Designleistung bestehe, dies aber auch den Weg für zukünftige Arbeiten weise Im Jahr 2017 hat das Team den ersten hydraulischen Radbeinroboter WLR-I entwickelt und sein integriertes Design und seine Verbundbewegungsfähigkeiten erfolgreich verifiziert. Im Jahr 2018 kam dann der radbeinige Roboter WLR-II der zweiten Generation auf den Markt, der erstmals ein schlauchloses Design verwirklichte und eine unerwartete Geländeanpassungsfähigkeit zeigte Zwei Brüder führen gemeinsame Bewegungs- und Schneebewegungstests durch Wie im Bild oben gezeigt, haben die ersten beiden Robotergenerationen tatsächlich ihre Anpassungsfähigkeit an komplexes Gelände und ihre Manövrierfähigkeit auf ebenem Boden unter Beweis gestellt, sie werden jedoch alle von externen Pumpstationen angetrieben. Dieses Mal hat WLR-3P wesentliche Verbesserungen vorgenommen, die auf dem Design der ersten beiden Generationen von Radbeinrobotern basieren. Verbessert nicht nur die sportlichen Fähigkeiten, sondern erreicht auch die Kraftautonomie.
 je geringer das Gewicht des Roboters und je stärker die Sprengkraft des Antriebssystems ist, desto höher kann der Roboter springen. Insbesondere gilt: Je kleiner das Verhältnis von Beingewicht zu Körpergewicht ist, desto höher ist die momentane Ausgangskraft und Geschwindigkeit des Kniegelenks, was sich stärker auf die Sprungleistung des Roboters auswirkt.
je geringer das Gewicht des Roboters und je stärker die Sprengkraft des Antriebssystems ist, desto höher kann der Roboter springen. Insbesondere gilt: Je kleiner das Verhältnis von Beingewicht zu Körpergewicht ist, desto höher ist die momentane Ausgangskraft und Geschwindigkeit des Kniegelenks, was sich stärker auf die Sprungleistung des Roboters auswirkt. 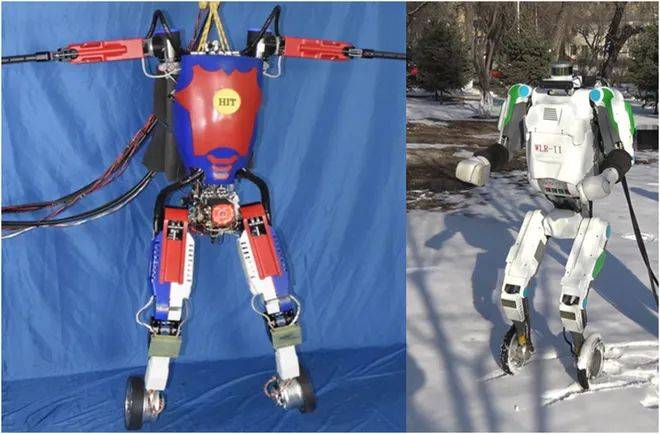
Das obige ist der detaillierte Inhalt vonDieser Radbeinroboter vom Harbin Institute of Technology hat Version 3.0 veröffentlicht! Entmystifizierung des Designs, der Steuerung und der Leistungstests. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
 So verwandeln Sie zwei Seiten in ein Word-Dokument
So verwandeln Sie zwei Seiten in ein Word-Dokument
 vue v-wenn
vue v-wenn
 Wie man Bilder in ppt scrollen lässt
Wie man Bilder in ppt scrollen lässt
 Kostenloser Website-Domainname
Kostenloser Website-Domainname
 Verwendung der Matlab-Griddata-Funktion
Verwendung der Matlab-Griddata-Funktion
 Standarddrucker festlegen
Standarddrucker festlegen
 Welche Software ist ig
Welche Software ist ig
 So lösen Sie das Problem, das Einschaltkennwort eines Win8-Computers zu vergessen
So lösen Sie das Problem, das Einschaltkennwort eines Win8-Computers zu vergessen








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



