


Die Kalibrierung von Sensoren ist ein notwendiges Bindeglied im Wahrnehmungssystem des autonomen Fahrens und ein notwendiger Schritt und eine Voraussetzung für die anschließende Sensorfusion. Ihr Zweck besteht darin, zwei oder mehr Sensoren in ein einheitliches räumlich-zeitliches Koordinatensystem umzuwandeln, damit die Sensorfusion sinnvoll ist . Wahrnehmung ist eine entscheidende Voraussetzung für die Entscheidungsfindung. Jeder Sensor muss nach der Herstellung und Installation durch Experimente kalibriert werden, um sicherzustellen, dass der Sensor den Designspezifikationen entspricht und die Genauigkeit der Messwerte gewährleistet ist.
Nachdem der Sensor im autonomen Fahrzeug installiert wurde, muss er gleichzeitig kalibriert werden. Während des Fahrvorgangs des Fahrzeugs weicht die Sensorposition aufgrund von Vibrationen und anderen Gründen von der ursprünglichen Position ab. Daher ist es notwendig, ihn in bestimmten Abständen zu kalibrieren, um den Sensor zu kalibrieren. Selbstfahrende Autos arbeiten gleichzeitig mit mehreren Arten von Sensoren zur Umweltwahrnehmung und Selbstwahrnehmung. Die Robustheit und Genauigkeit von Sensoren sind im Wahrnehmungsprozess selbstfahrender Autos besonders wichtig.
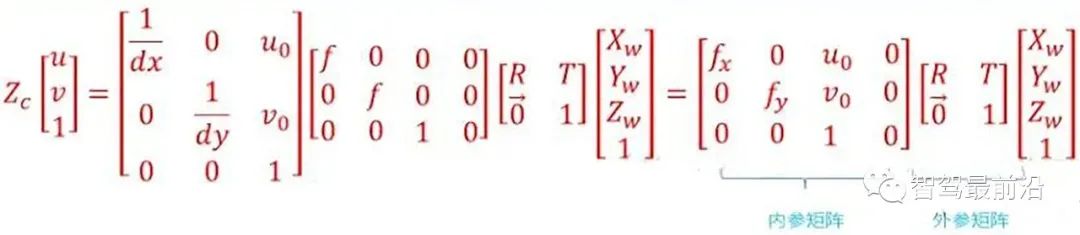
Die fahrzeugmontierte Kamera wird in einem bestimmten Winkel und in einer bestimmten Position am Fahrzeug installiert, um die von der fahrzeugmontierten Kamera erfassten Umgebungsdaten mit den realen Objekten im fahrenden Fahrzeug abzugleichen Umgebung, dh um die von der am Fahrzeug montierten Kamera generierten Daten zu finden. Die Konvertierungsbeziehung zwischen den Punktkoordinaten im Bildpixelkoordinatensystem und den Punktkoordinaten im Kameraumgebungskoordinatensystem erfordert eine Kamerakalibrierung. 1. Kamerainterne Parameterkalibrierung , wir können Finden Sie die Konvertierungsbeziehung zwischen dem Umgebungskoordinatensystem und dem Bildpixelkoordinatensystem, dh dem Punkt P von
zur internen Parametermatrix, ihren vier Konstanten fx, fy, Uo, Vo. Er bezieht sich auf technische Designindikatoren wie Brennweite, Hauptpunkt und Sensor der Kamera und hat nichts mit externen Faktoren (wie Umgebung, Kameraposition) zu tun. Daher wird er als interner Parameter der Kamera bezeichnet Kamera. Die interne Referenz wird festgelegt, wenn die Kamera das Werk verlässt. Aufgrund des Herstellungsprozesses und anderer Probleme weisen jedoch selbst auf derselben Produktionslinie hergestellte Kameras leicht unterschiedliche interne Parameter auf. Daher ist es häufig erforderlich, die internen Parameter der Kamera durch Experimente zu bestimmen. Die Kalibrierung einer monokularen Kamera bezieht sich normalerweise auf die experimentelle Bestimmung der internen Parameter der Kamera.
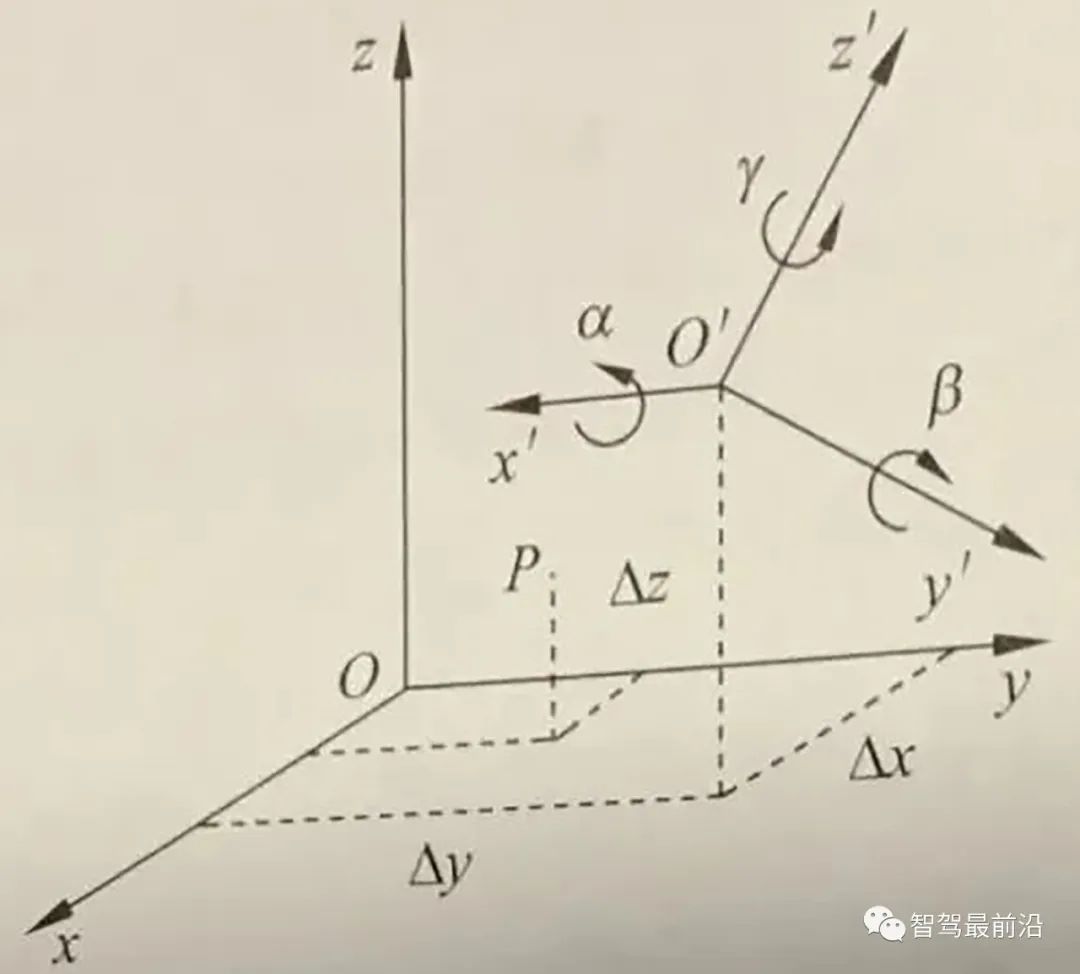
Die externe Parametermatrix umfasst die Rotationsmatrix und die Translationsmatrix. Die Rotationsmatrix und die Translationsmatrix beschreiben gemeinsam, wie der Punkt vom Weltkoordinatensystem in das Kamerakoordinatensystem umgewandelt wird. In der Computer Vision wird der Prozess der Bestimmung der externen Parametermatrix üblicherweise als visuelle Lokalisierung bezeichnet. Nachdem die Bordkamera in ein selbstfahrendes Auto eingebaut wurde, muss die Kameraposition im Fahrzeugkoordinatensystem kalibriert werden. Darüber hinaus ändert sich die Position der Bordkamera aufgrund der Stöße und Vibrationen des Autos im Laufe der Zeit langsam, sodass selbstfahrende Autos die Kameraposition regelmäßig neu kalibrieren müssen, ein Vorgang, der als Kalibrierung bezeichnet wird.
1.2 Kameraverzerrungskorrektur
 Beim tatsächlichen Gebrauch kann die Kamera die perspektivische Projektion nicht ganz genau gemäß dem idealen Lochkameramodell durchführen. Normalerweise kommt es zu einer Linsenverzerrung, d. h. der Objektpunkt wird im Bild abgebildet Tatsächliche Kamera Zwischen dem in der Ebene erzeugten Bild und der idealen Abbildung besteht ein gewisser optischer Verzerrungsfehler, und der Verzerrungsfehler besteht hauptsächlich aus radialen Verzerrungsfehlern und tangentialen Verzerrungsfehlern.
Beim tatsächlichen Gebrauch kann die Kamera die perspektivische Projektion nicht ganz genau gemäß dem idealen Lochkameramodell durchführen. Normalerweise kommt es zu einer Linsenverzerrung, d. h. der Objektpunkt wird im Bild abgebildet Tatsächliche Kamera Zwischen dem in der Ebene erzeugten Bild und der idealen Abbildung besteht ein gewisser optischer Verzerrungsfehler, und der Verzerrungsfehler besteht hauptsächlich aus radialen Verzerrungsfehlern und tangentialen Verzerrungsfehlern.
Radiale Verzerrung: Aufgrund der Eigenschaften des Objektivs neigt das Licht dazu, sich am Rand des Kameraobjektivs in kleinem oder großem Maße zu krümmen, was als radiale Verzerrung bezeichnet wird. Diese Art der Verzerrung ist bei gewöhnlichen billigen Objektiven deutlicher zu erkennen. Die radiale Verzerrung umfasst hauptsächlich Tonnenverzerrung und Kissenverzerrung. Bei der tonnenförmigen Verzerrung handelt es sich um eine tonnenförmige Erweiterung des Abbildungsbildes, die durch die Struktur des Linsenobjekts und der Linsengruppe im Objektiv verursacht wird. Tonnenverzerrungen sind normalerweise leichter zu erkennen, wenn ein Weitwinkelobjektiv oder das Weitwinkelende eines Zoomobjektivs verwendet wird. Unter Kissenverzerrung versteht man das Phänomen, dass das Bild durch das Objektiv zur Mitte hin „schrumpft“. Bei Verwendung des Telebereichs eines Zoomobjektivs ist die Wahrscheinlichkeit größer, dass Menschen eine kissenförmige Verzerrung bemerken. Beim Computersehen hat die radiale Verzerrung einen sehr wichtigen Einfluss auf die Szenenrekonstruktion. Die Wahrnehmung der Umgebung durch das autonome Fahrsystem erfordert eine hochpräzise Rekonstruktion der Umgebung durch die Kamera. Wenn die Verzerrung nicht korrigiert wird, können keine genauen Umgebungsinformationen erhalten werden. Beispielsweise können Ziele in der Umgebung in jedem Bereich des Bildes erscheinen. Wenn die Verzerrung nicht korrigiert wird, sind die durch die Bildverarbeitungstechnologie ermittelte Zielposition und -größe häufig ungenau, was sich direkt auf die Fahrsicherheit autonomer Fahrzeuge auswirkt. Darüber hinaus sind selbstfahrende Autos mit mehreren Kameras an verschiedenen Standorten ausgestattet. Wenn die radiale Verzerrung während des Bildzusammenfügungsprozesses nicht berücksichtigt wird, wird der Unschärfeeffekt der zusammengefügten Bilder durch die Nichtübereinstimmung entsprechender Merkmale verursacht. Bei allgemeinen Kameras wird die radiale Verzerrung des Bildes häufig als Polynommodell niedriger Ordnung beschrieben. Angenommen, (u, v) ist die Koordinate des korrigierten Punkts, (u', u') ist die Koordinate des unkorrigierten Punkts, dann kann die Transformation zwischen den beiden durch die folgende Formel bestimmt werden: 
Radiales Polynommodell niedriger Ordnung
Andererseits können für die Tangentialverzerrung zwei weitere Parameter p1, p2 zur Korrektur verwendet werden:

Tangentialverzerrung Low- Ordnungspolynommodell
1.3 Kamerainterne Parameterkalibrierungsmethode
In dieser Phase wird die Kalibrierung der Verzerrungsparameter im Allgemeinen gleichzeitig mit den anderen internen Parametern durchgeführt. Die derzeit am weitesten verbreitete Methode ist die von Zhang Zhengyou im Jahr 2000 vorgeschlagene Zhang Zhengyou-Kalibrierungsmethode. Die Kalibrierungsmethode von Zhang Zhengyou findet die internen Eckpunkte des Schachbrett-Kalibrierungsbretts in jedem Bild, indem es das Schachbrett-Kalibrierungsbrett an verschiedenen Positionen fotografiert, und legt durch die Korrespondenz zwischen den internen Eckpunkten Einschränkungen für die Matrix fest, wodurch die internen Parameter wiederhergestellt werden Matrix K.  2. Kalibrierung externer Parameter zwischen Kameras
2. Kalibrierung externer Parameter zwischen Kameras
Aus einer anderen Perspektive kann die externe Parameterkalibrierung der Kamera auch als „Posenschätzungsproblem“ bezeichnet werden. Die relative Pose [R|t] zwischen den beiden Kameras hat 6 Freiheitsgrade (räumliche Position und Rotationsbeziehung), solange die beiden Kameras gleichzeitig 3 Punkte im Raum erfassen relative Haltung wiederhergestellt werden. Das Problem der Wiederherstellung der relativen Haltung zwischen Kameras aus drei Paaren entsprechender Punkte wird als „Perspektive-3-Punkte-Problem, P3P“ bezeichnet. In der Realität werden häufig mehr als 3 Punkte verwendet, um die relative Haltung wiederherzustellen und die Robustheit zu verbessern, und das P3P-Problem wird als PnP-Problem verallgemeinert.
Zunächst verwendeten die Forscher die direkte lineare Transformation (DLT), um das PnP-Problem zu lösen. Um die Genauigkeit zu verbessern, schlugen die Forscher später den Reprojektionsfehler der robusten Linearisierung vor und begannen, die alternative Methode zur Lösung des PnP zu verwenden Problem und schlug daher die berühmte Bündelanpassungsmethode (Bundle Adjustment, BA) zur Einstellungsschätzung vor.
02 Lidar-Kalibrierung
Der Lidar und die Fahrzeugkarosserie sind starr miteinander verbunden und die relative Lage und Verschiebung zwischen beiden ist festgelegt. Um die relative Koordinatenbeziehung zwischen Lidars sowie zwischen Lidars und Fahrzeugen herzustellen, ist es notwendig, die Lidar-Installation zu kalibrieren und die Lidar-Daten vom Lidar-Koordinatensystem in das Fahrzeugkarosserie-Koordinatensystem umzuwandeln.
Fahrzeugkoordinatensystem und Lidar-Koordinatensystem

Die realen Koordinaten desselben Punktes in zwei Koordinatensystemen, also desselben Punktes, werden durch Experimente ermittelt Eine Reihe von Gleichungen kann diese 16 unbekannten Parameter berechnen. Darüber hinaus ist es in autonomen Fahrzeugen normalerweise erforderlich, das Laserradar und das Koordinatensystem der Trägheitsnavigationseinheit (IMU) zu kalibrieren, um die Beziehung zwischen dem Laserradar und dem Koordinatensystem der Fahrzeugkarosserie herzustellen.
Bei autonomen Fahrzeugen gibt es manchmal mehrere Lidars, und die von jedem Lidar erfasste äußere Umgebung muss genau auf das Koordinatensystem der Fahrzeugkarosserie abgebildet werden. Wenn daher mehrere Lidars vorhanden sind, müssen die relativen Positionen der mehreren Lidars kalibriert und kalibriert werden.
Es gibt viele Ideen für die Kalibrierung externer Parameter zwischen Lidars. Die am häufigsten verwendete Idee besteht darin, die Koordinatentransformationsbeziehung zwischen Lidars indirekt über die Koordinatentransformationsbeziehung zwischen verschiedenen Lidars und der Karosserie abzuleiten.
Bei einem autonomen Fahrzeug sind das Lidar und das fahrerlose Auto fest verbunden, und die relative Lage und Verschiebung zwischen den beiden ist festgelegt Punkte haben eindeutige Positionskoordinaten, die ihnen im Umgebungskoordinatensystem entsprechen. Ebenso verfügt die Kamera über eindeutige Positionskoordinaten im Umgebungskoordinatensystem, sodass zwischen dem Lidar und der Kamera eine feste Koordinatentransformation stattfindet. Die gemeinsame Kalibrierung von Lidar und Kameras besteht darin, die Vereinheitlichung mehrerer Sensorkoordinaten wie einzeilige Lidar-Koordinaten, Kamerakoordinaten und Bildpixelkoordinaten durch Extrahieren der entsprechenden Merkmalspunkte des Kalibrierungsobjekts auf dem einzeiligen Lidar und dem Bild abzuschließen. und realisieren Sie die räumliche Kalibrierung von Lidar und Kamera.
Nach Abschluss der Kalibrierung der externen Kameraparameter und der externen Parameterkalibrierung des Lidar kann die Beziehung zwischen beiden tatsächlich vollständig bestimmt werden. Der Lidar-Scanpunkt kann auf das Bildpixelkoordinatensystem projiziert werden.
Ähnlich wie die interne Parameterkalibrierungsmethode der Kamera kann die Kalibrierungsmethode der Kalibrierplatte auch für die externe Parameterkalibrierung von Lidar und Kamera verwendet werden.
Das obige ist der detaillierte Inhalt vonAusführliche Interpretation der Sensorkalibrierungstechnologie für intelligente Autos. Für weitere Informationen folgen Sie bitte anderen verwandten Artikeln auf der PHP chinesischen Website!
 Eine vollständige Liste der Tastenkombinationen für Ideen
Eine vollständige Liste der Tastenkombinationen für Ideen
 So erstellen Sie einen Index in Word
So erstellen Sie einen Index in Word
 ps ausgewählten Bereich löschen
ps ausgewählten Bereich löschen
 Welche Größe hat A5-Papier?
Welche Größe hat A5-Papier?
 Lösung für fehlende xlive.dll
Lösung für fehlende xlive.dll
 Methode zum Öffnen der Bereichsberechtigung
Methode zum Öffnen der Bereichsberechtigung
 Lösung für Socket-Fehler 10054
Lösung für Socket-Fehler 10054
 Verwendung der C-Sprache printf-Funktion
Verwendung der C-Sprache printf-Funktion








![[Web-Frontend] Node.js-Schnellstart](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



