

相機和雷射雷達的標定是許多任務中至關重要的基礎工作,標定的準確度直接影響了後續方案融合的效果上限。隨著許多自動駕駛和機器人公司投入了大量的人力和物力來不斷提高標定的準確性,今天我們將為大家介紹一些常見的Camera-Lidar標定工具箱,建議大家收藏起來!
一次拍攝多棋盤格偵測:https://www.cvlibs.net/software/libcbdetect/
使用MATLAB編寫的演算法能夠自動提取角點並將它們精確到亞像素級別,並將這些角點組合成矩形棋盤狀的圖案。此演算法具有處理不同類型影像(如針孔相機、魚眼相機、全景相機)的能力。

Autoware 框架的雷射雷達-相機標定工具包。
連結:https://github.com/autowarefoundation/autoware_ai_utilities/tree/master/autoware_camera_lidar_calibrator
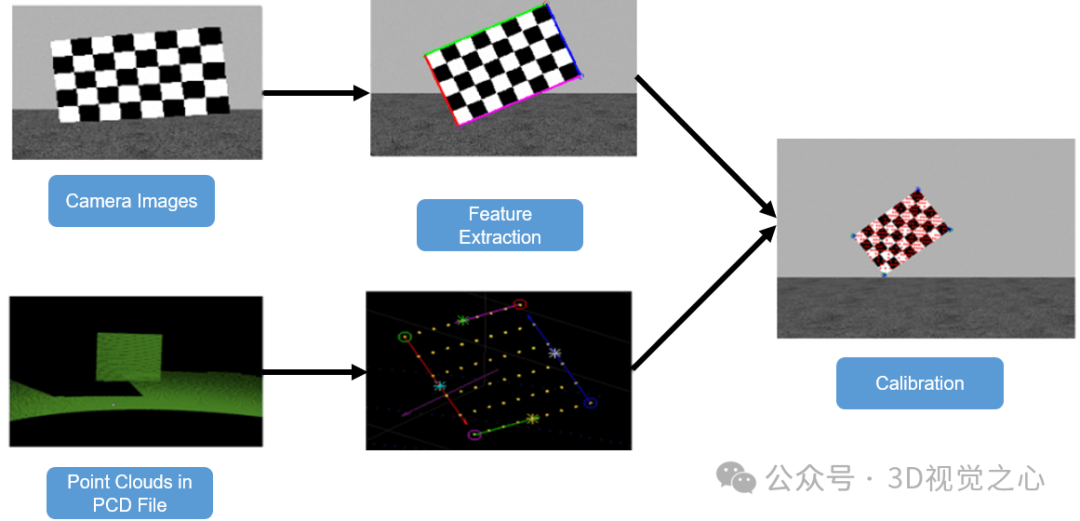
基於3D-3D點對應關係的光達相機標定,ROS包,出自論文《LiDAR-Camera Calibration using 3D-3D Point correspondences》!
連結:https://github.com/ankitdhall/lidar_camera_calibration
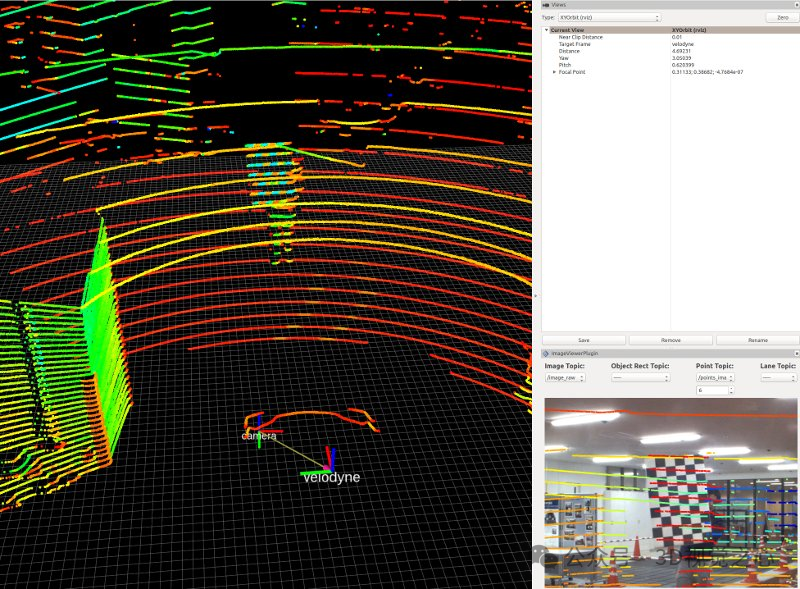
CalibrationTools為雷射雷達-雷射雷達、雷射雷達相機等感測器對提供標定工具。除此之外,還提供了:
1)定位-偏差估計工具估計用於航位推算(IMU和里程計)的感測器的參數,以獲得更好的定位性能!
2)Autoware控制輸出的可視化和分析工具;
3)用於修復車輛指令延遲的校準工具;
連結:https://github.com /tier4/CalibrationTools
Matlab自帶的工具箱,支援雷射雷達和相機的標定,鏈接:https://ww2.mathworks.cn/help/lidar/ug/lidar-and-camera-calibration.html
ROS Camera LIDAR Calibration Package,連結:https://github.com/heethesh/lidar_camera_calibration

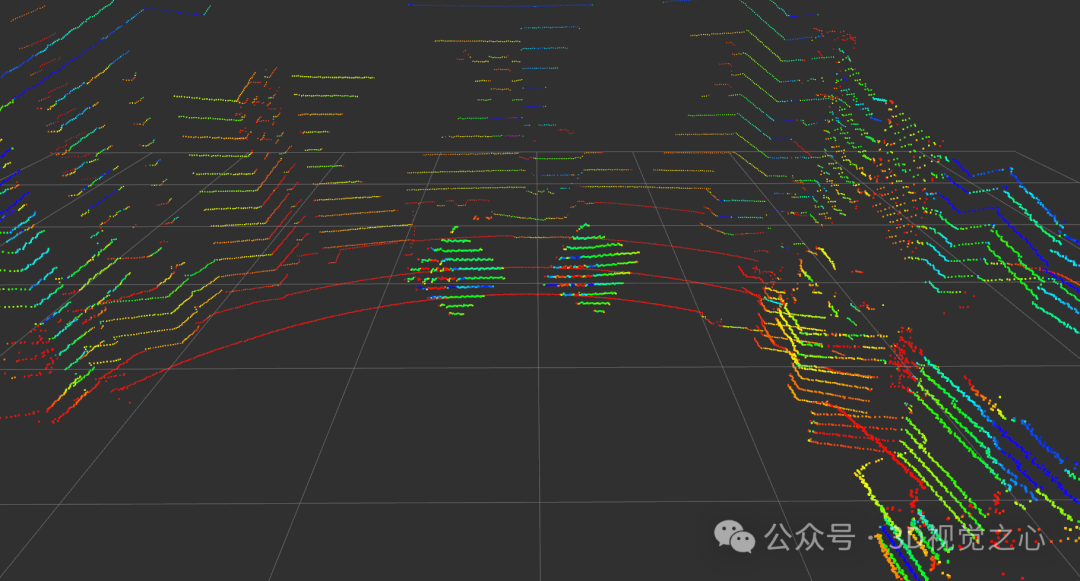
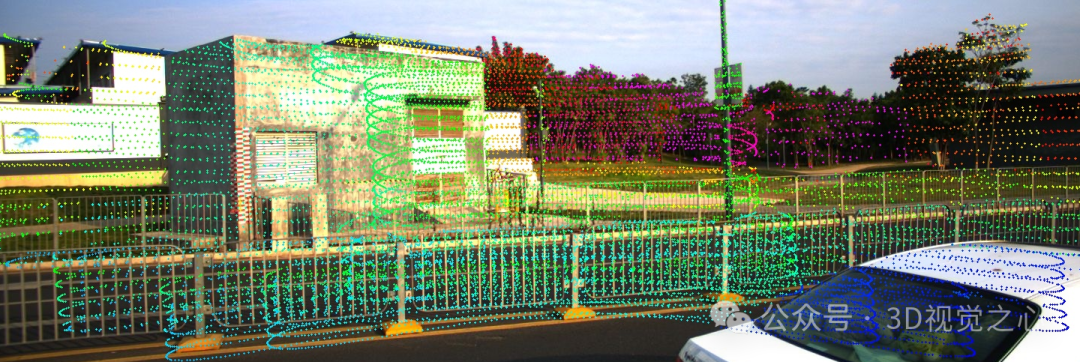
該軟體包提供了一個用於雷射雷達相機標定的工具箱:可通用:它可以處理各種雷射雷達和相機投影模型,包括旋轉和非重複掃描雷射雷達,以及針孔、魚眼和全向投影相機。 無目標:它不需要標定目標,而是使用環境結構和紋理進行標定。 單次拍攝:標定至少只需要一對光達點雲和相機影像。可選地,可以使用多個雷射雷達相機資料對來提高精度。 自動:標定過程是自動的,不需要初始猜測。 準確且穩健:它採用了像素級直接光達相機配準演算法,與基於邊緣的間接光達相機配準相比,該演算法更穩健和準確。
連結:https://github.com/koide3/direct_visual_lidar_calibration
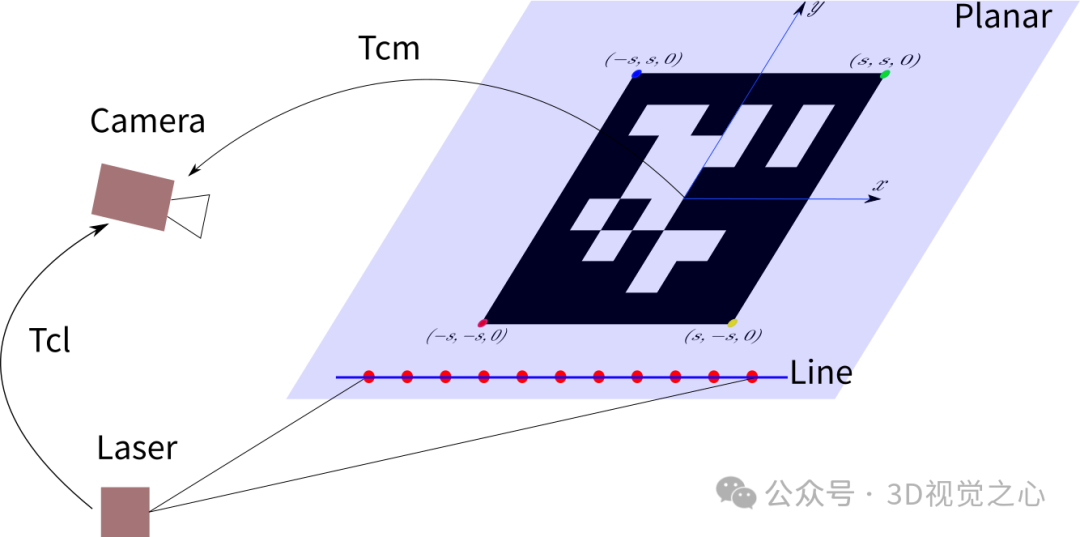
這是一個基於ROS 的單線雷射和相機外參數自動標定代碼。標定原理如下圖所示,相機透過二維碼估計標定板平面在相機座標系下的平面方程,由於雷射點雲落在平面上,將點雲透過雷射座標係到相機座標系的外參數 轉換到相機座標系,建構點到平面的距離作為誤差,使用非線性最小平方法求解。
連結:https://github.com/MegviiRobot/CamLaserCalibraTool
以上是相機與光達是怎麼標定的?一覽產業所有主流的標定工具的詳細內容。更多資訊請關注PHP中文網其他相關文章!

































