

很高興受邀參加自動駕駛之心的活動,我們將分享在線重建矢量化高精度地圖的抗擾動方法ADMap。你可以在https://github.com/hht1996ok/ADMap 上找到我們的程式碼。感謝大家的關注與支持。
在自動駕駛領域,線上高清地圖重建對於規劃和預測任務具有重要意義,近期的工作構建了許多高性能的高清地圖重建模型來滿足這一需求。然而向量化實例內部的點序由於預測偏差可能會出現抖動或鋸齒現象,進而影響後續任務。因此,我們提出了Anti-Disturbance Map reconstruction framework(ADMap)。本文希望兼顧模型速度和整體的精度,並且在部署時不會讓工程師們感到困擾。因此,提出了三個高效且有效的模組:Multi-Scale Perception Neck(MPN)、Instance Interactive Attention(IIA)和Vector Direction Difference Loss(VDDL)。透過級聯的探索實例間和實例內部的點序關係,我們的模型更好地監督了點序的預測過程。
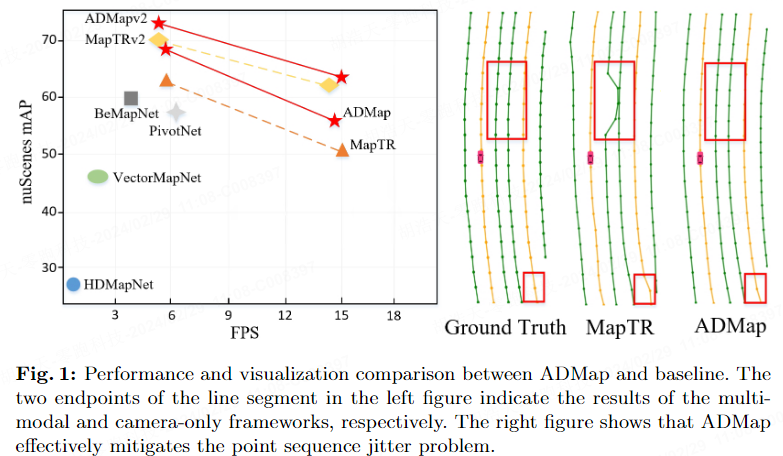
我們在nuScenes和Argoverse2資料集中驗證了ADMap的有效性。實驗結果表明,ADMap在各項基準測試中均表現出最佳效能。在nuScenes基準中,ADMap在使用僅相機資料和多模態資料的情況下,mAP相比基準分別提高了4.2%和5.5%。 ADMapv2不僅降低了推理延遲,還顯著提升了基線效能,最高mAP達到了82.8%。在Argoverse資料集中,ADMapv2的mAP提高至62.9%,同時幀率維持在14.8FPS。
總結來說,我們提出的ADMap主要有以下幾點貢獻:
如圖1所示,實例中的預測點往往會不可避免的出現抖動或偏移現象,這種抖動會導致重建後的實例向量變得不平滑或鋸齒狀,嚴重影響了線上高精地圖的品質和實用性。我們認為,原因在於現有模型並未充分考慮實例間和實例內部的交互方式,實例點與地圖拓撲資訊不完全的交互作用會導致其預測位置的不準。此外僅透過L1 loss和cosine embedding loss等監督無法有效的利用幾何關係來約束實例點的預測過程,網路需要利用各點間的向量線段來精細捕捉點序的方向資訊以更準確的約束每個點的預測過程。
為了緩解以上問題,我們創新的提出了Anti-Disturbance Map reconstruction framework(ADMap),實現了矢量化高精地圖的即時穩定重建。
如圖2所示,ADMap透過多尺度感知頸部(Multi-Scale Perception Neck,MPN)、實例互動注意力(Instance Interactive Attention ,IIA)和向量方向差損失(Vector Direction Difference Loss,VDDL)來更精細地預測點序拓樸結構。以下將分別介紹MPN、IIA以及VDDL。
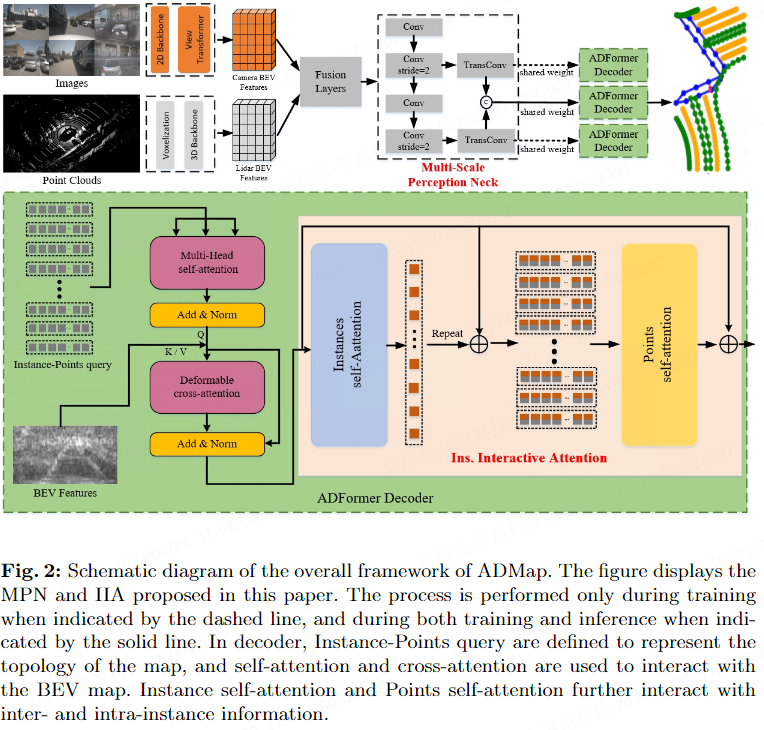
為了獲得更詳細的BEV特徵,我們引入了Multi-Scale Perception Neck(MPN )。 MPN接收融合後的BEV特徵作為輸入。透過下採樣,每個層級的BEV特徵將連接到一個上採樣層,以恢復原始尺寸的特徵圖。最終,各層級的特徵圖將合併成多尺度的BEV特徵。
如圖2中的虛線代表該步驟僅在訓練時實施,實線代表訓練和推理過程都會實施該步驟。在訓練過程中,多尺度BEV特徵圖和每一層的BEV特徵圖都會被送入Transformer Decoder,這使網路可以在不同尺度預測場景的實例資訊以捕捉更精細的多尺寸特徵。而在推理過程中,MPN僅保留多尺度BEV特徵,不會輸出各層級特徵圖,這保證了該neck在推理時的資源佔用不變。
Transformer Decoder中定義了一組實例層級的查詢和一組點層級的查詢,隨後將點層級查詢共享到所有實例中,這些分層查詢被定義為:
解碼器包含幾個級聯的解碼層,這些層迭代地更新分層查詢。在各解碼層中,分層查詢被輸入到自註意力機制中,這使得分層查詢間可以相互交換訊息,Deformable Attention被用來交互分層查詢和多尺度BEV特徵。
為了在解碼階段更好的獲取各實例特徵,我們提出了Instance Interactive Attention(IIA),其由Instances self-attention和Points self-attention組成。有別於MapTRv2並行擷取實例層級和點層級的嵌入,IIA級聯地擷取了查詢嵌入。實例嵌入間的特徵交互作用進一步幫助了網路學習點級嵌入間的關係。
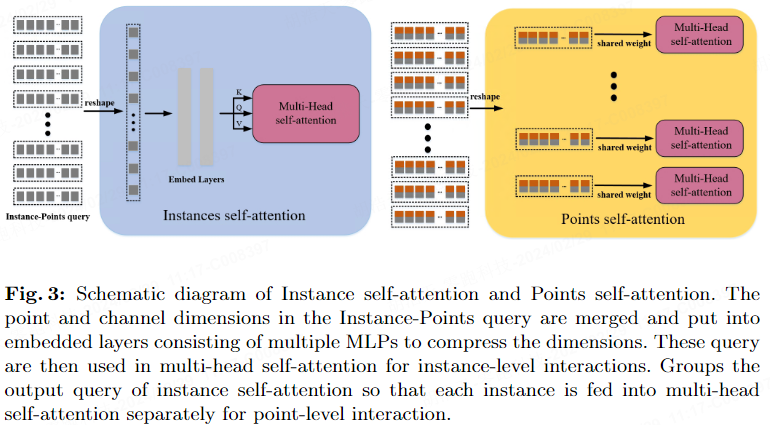
如圖3所示,Deformable cross-attention輸出的分層嵌入被輸入到Instances self-attention。將點維度與通道維度合併後維度變換為。隨後,分層嵌入存取由多個MLP組成的Embed Layer中取得實例查詢,該查詢被放入Multi-head self-attention中來捕捉實例間的拓樸關係,得到實例嵌入。為了在點級嵌入中融入實例層級訊息,我們將實例嵌入和分層嵌入相加。相加後的特徵被輸入至Point self-attention中,對各實例內的點特徵進行交互,進一步精細關聯了點序間的拓樸關係。
高精地圖中包含了向量化的靜態地圖元素,包括車道線、路沿和行人穿越道等。 ADMap針對這些開放形狀(車道線、路沿)和封閉形狀(人行橫道)提出了Vector Direction Difference Loss。我們建模了實例內部的點序向量方向,透過預測向量方向和真實向量方向的差值可以更細緻的監督點的方向。此外,真實向量方向差較大的點被認為代表了部分場景拓撲的劇烈變化(更不容易預測),更加需要被模型關注。因此,真實向量方向差較大的點被賦予了更大的權重,以確保網路可以準確預測到這個劇烈變化的點。
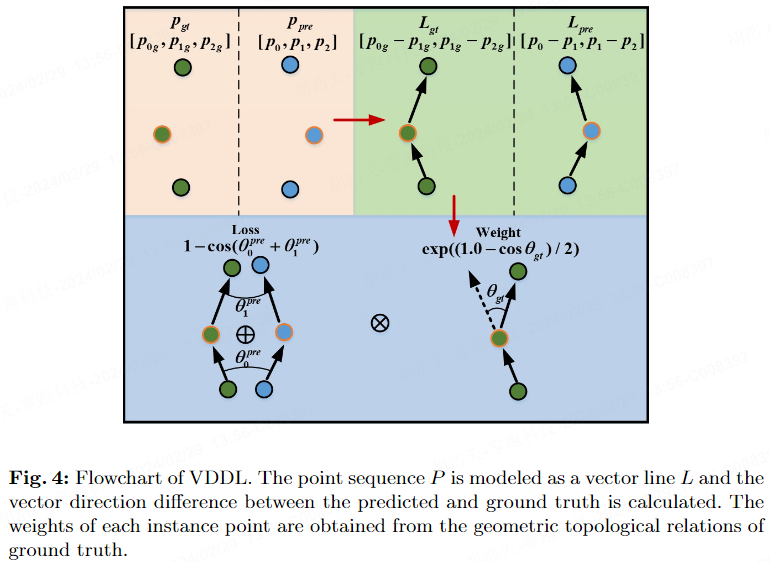
圖4展示了預報點序{ 和真實點序{ 中對預測向量線{ 與真實向量線{ 的初始建模。為了確保相反的角度不會得到相同的損失,我們計算向量線角度差餘弦值θ':
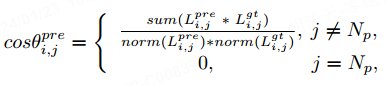
其中函數累加了向量線的座標位置,代表歸一化操作。我們利用真實實例中各點的向量角度差來為它們賦予不同大小的權重。權重定義如下:
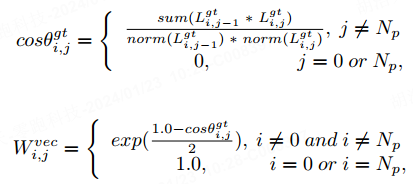
其中代表實例中點的數量,函數代表底數為e的指數函數。由於首尾兩點無法計算向量角度差,因此我們將首尾點的權重設為1。當真實值中的向量角度差變大時,我們賦予該點更大的權重,這使得網路更為關注顯著變化的地圖拓撲結構。點序中各點的角度差損失定義為:
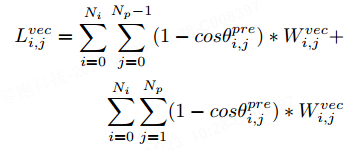
我們使用θ將損失值的區間調整為[0.0, 2.0]。透過將各點的相鄰向量線角度差餘弦相加,此損失更全面的涵蓋了各點的幾何拓樸資訊。由於首尾兩點僅有一條相鄰向量線,因此首尾兩點的損失為單一向量角度差的餘弦值。
為了公平的評估,我們將地圖元素分為車道線、道路邊界和行人穿越道三種。採用平均精度(AP)來評估地圖建構的質量,使用預測點序和真實點序的chamfer距離總和來判斷兩者是否匹配。 Chamfer距離閾值設定為[0.5, 1.0, 1.5],我們分別在這三種閾值下計算AP,並將平均值作為最終指標。
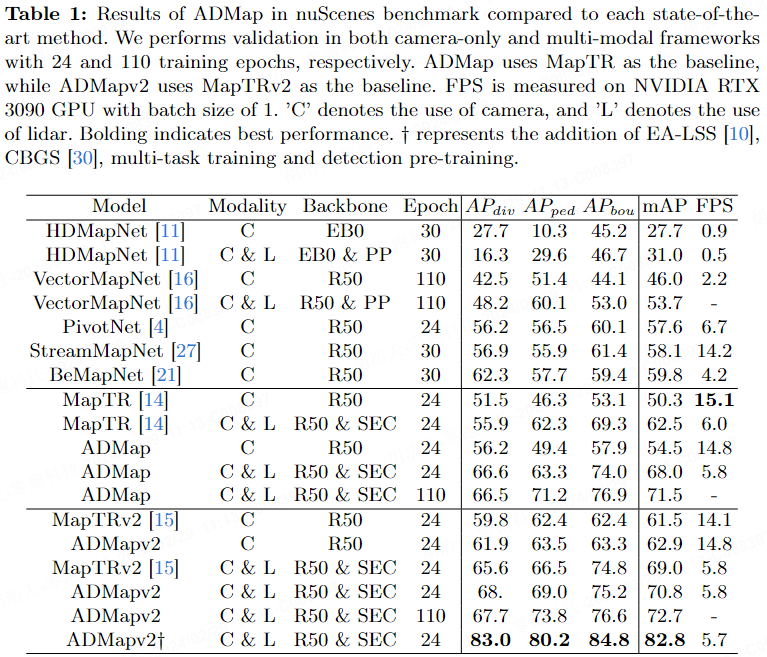
表1报告了ADMap和最先进方法在nuScenes数据集的指标。在camera-only框架下,ADMap的mAP相较于baseline(MapTR)提高了5.5%,ADMapv2相较于baseline(MapTRv2)提高了1.4%。ADMapv2最高mAP达到82.8%,取得当前基准中最佳性能,部分细节会在后续arxiv版本中公布。在速度方面,ADMap相较于其baseline在FPS略微降低的情况下显著提高模型性能。值得一提的是,ADMapv2不仅提高了性能,在模型推理速度方面也有提升。
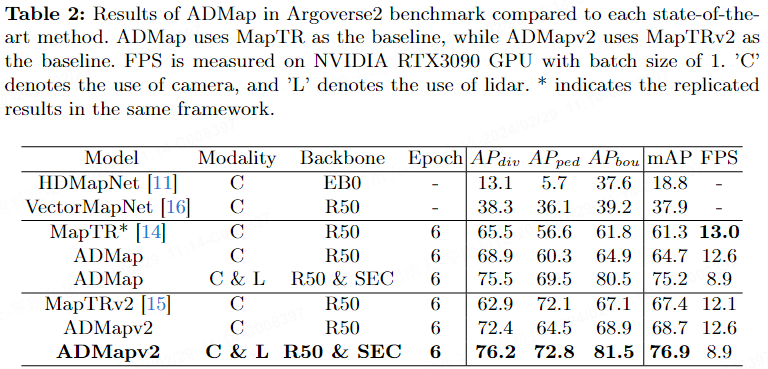
表2报告了ADMap和最先进方法在Argoverse2中的指标。在camera-only框架下,ADMap和ADMapv2相较于baseline分别提高了3.4%和1.3%。在多模态框架下,ADMap和ADMapv2达到了最佳性能,mAP分别为75.2%和76.9%。在速度方面。ADMapv2相较于MapTRv2提升了11.4ms。
在表 3 中,我们提供了在 nuScenes 基准上ADMap各个模块的消融实验。
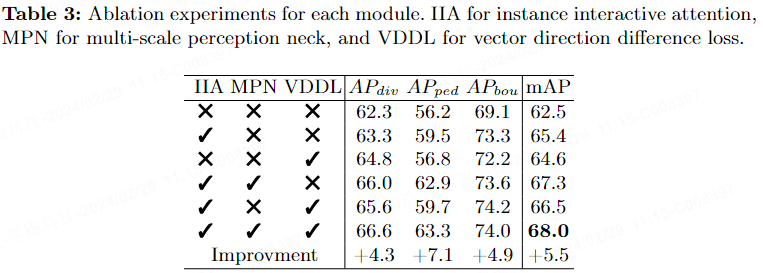
表4给出了插入不同注意力机制对于最终性能的影响。DSA表示decoupled self-attention,IIA表示实例交互注意力。结果表示IIA相较于DSA,mAP提高1.3%。
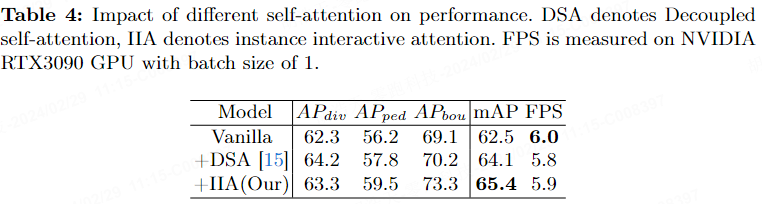
表5报告了在融合特征后增加backbone和neck层对mAP的影响。增加基于SECOND的backbone和neck层后,mAP提高了1.2%。而增加MPN后,在不增加推理时间的前提下,模型的mAP提高了2.0%。
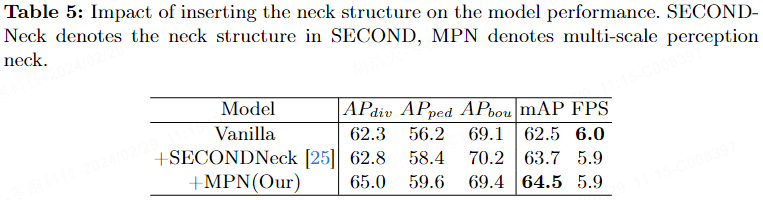
表6报告了在nuScenes基准中增加VDDL对性能的影响。可以看到,当权重设置为1.0时,mAP最高,达到了53.3%。
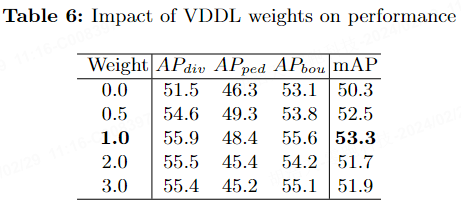
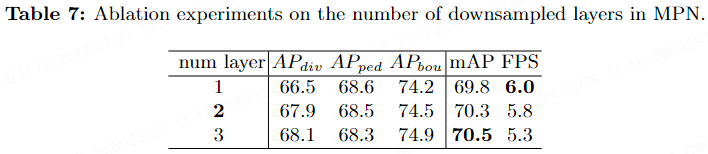
表7报告了在nuScenes基准中,MPN下采样层数对最终性能的影响。下采样层数越多,模型推理速度越慢。因此,为了平衡速度和性能,我们设置了下采样层数为2。
为了验证ADMap有效缓解了点序扰动问题,我们提出了average chamfer distance(ACE)。我们挑选了chamfer distance之和小于1.5的预测实例,并计算它们的average chamfer distance(ACE)。当ACE越小代表实例点序预测的越准确。表8证明了ADMap可以有效缓解点云扰动这一问题。

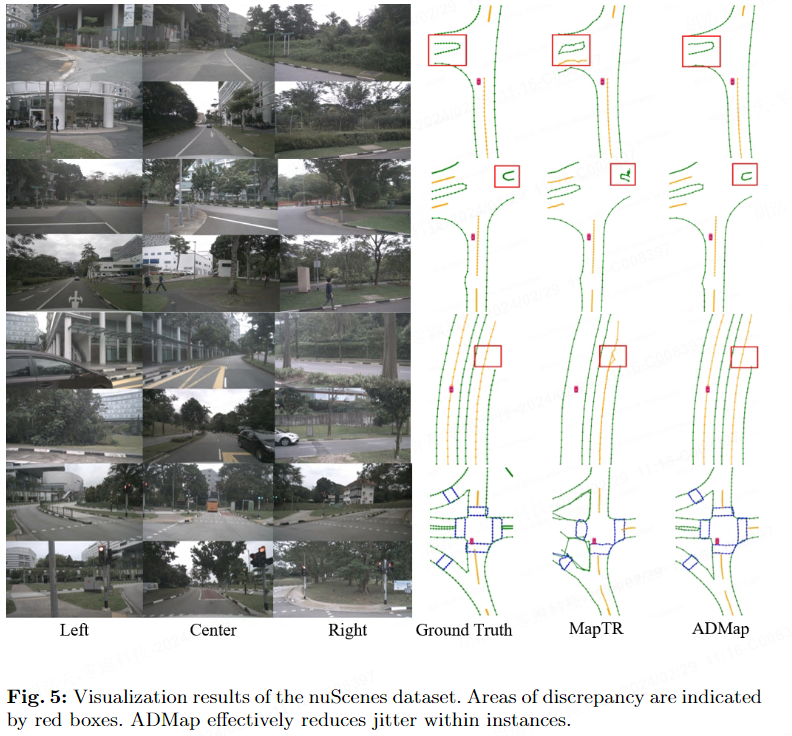
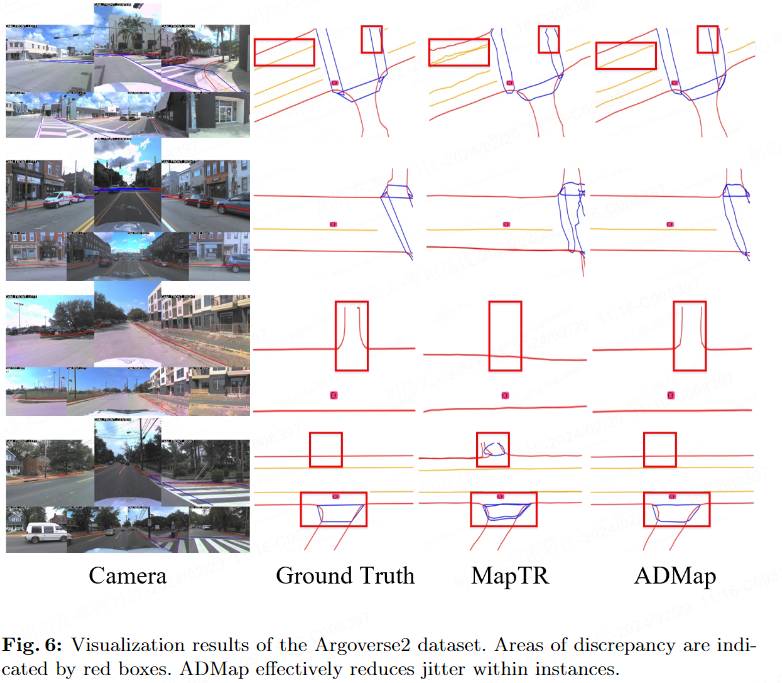
下面两幅图为nuScenes数据集和Argoverse2数据集中的可视化结果。
ADMap是一个高效且有效的矢量化高精地图重建框架,其有效缓解了实例矢量的点序由于预测偏差可能会出现的抖动或锯齿现象。大量实验表明,我们提出的方法在nuScenes和Argoverse2基准上均取得最佳性能。我们相信ADMap协助推进矢量高精地图重建任务的研究,从而更好地推动自动驾驶等领域的发展。
以上是ADMap:抗干擾線上高精地圖新思路的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















