

在CARLA v2中以專家級的熟練程度運作。
主題:Think2Drive: Efficient Reinforcement Learning by Thinking in Latent World Model for Quasi-Realistic Autonomous Driving (in CARLA-v2)
作者單位:上海交通大學
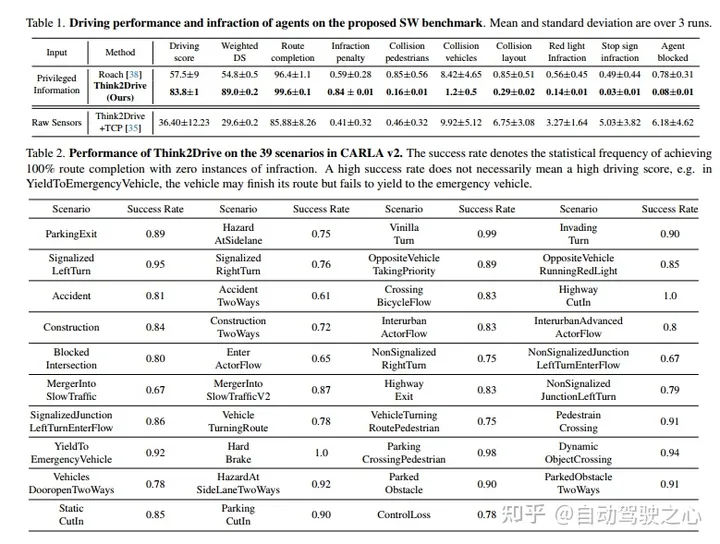
現實世界中的自動駕駛(AD),尤其是城市駕駛,涉及許多corner case。最近發布的AD模擬器CARLA v2在駕駛場景中增加了39個常見事件,並提供了比CARLA v1更接近真實的測試平台。這給社區帶來了新的挑戰,到目前為止,還沒有文獻報告CARLA v2中的新場景取得了任何成功,因為現有的工作大多必須依賴特定規則進行規劃,但它們無法涵蓋CARLA v2中更複雜的情況。這項工作主動直接訓練一個規劃器,希望能夠靈活有效地處理corner case,認為這也是AD的未來方向。據我們所知,我們開發了第一個基於模型的強化學習方法,名為Think2Drive,用於AD,具有一個世界模型來學習環境的轉變,然後它充當神經模擬器來訓練規劃器。這種範式大大提高了訓練效率,因為世界模型中的低維度狀態空間和張量的平行計算。
結果,Think2Drive能夠在單一A6000 GPU上進行3天的訓練後,在CARLA v2中以專家級的熟練程度運行,據我們所知,迄今為止尚未報告有關CARLA v2的成功(100 %的路線完成)。也提出了CornerCase-Repository,這是一個支援透過場景評估駕駛模型的基準。此外,提出了一個新的平衡指標來評估效能,包括路線完成、違規次數和場景密度,以便駕駛分數可以提供更多關於實際駕駛表現的資訊。
以上是Think2Drive:首個用於自動駕駛的模型為基礎的RL方法(上海交大)的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















