

CMU和ETH Zurich團隊合作開發了名為"敏捷但安全"(ABS)的新框架,為四足機器人在複雜環境中實現高速運動提供了解決方案。該框架不僅在避免碰撞方面表現出高效能力,而且實現了前所未有的3.1毫秒極速運動。這項創新為足式機器人領域帶來了新的進展。
在高速機器人運動領域,同時保持速度和安全性一直是一個巨大的挑戰。然而,卡內基美隆大學(CMU)和蘇黎世聯邦理工學院(ETH)的研究團隊最近取得了突破性進展。他們開發的全新四足機器人演算法不僅能夠快速移動於複雜環境中,還能巧妙地避開障礙物,真正實現了「敏捷且安全」的目標。這項演算法的創新之處在於它能夠快速地識別和分析周圍環境,並根據即時數據做出智慧決策。透過使用先進的感測器和強大的運算能力,機器人能夠準確地感知周圍的障礙物,並透過調整步態和軌跡來避開它們。這項技術的成功應用將大大推動高速機器人的發展

論文地址: https://arxiv.org/pdf/2401.17583.pdf


 #在ABS 的加持下,機器狗在各種場景下都展現出了驚豔的高速避障能力:
#在ABS 的加持下,機器狗在各種場景下都展現出了驚豔的高速避障能力:
障礙重重的狹窄走廊:

凌亂的室內場景:
#無論是草地還是戶外,靜態或動態障礙,機器狗都從容應對:
遇見嬰兒車,機器狗靈巧閃開:
####警告牌、箱子、椅子也都不在話下:######### ######對於突然出現的墊子和人腳,也能輕鬆繞過:###############機狗甚至還可以玩老鷹捉小雞:### ###############ABS 突破性技術:############RL Learning model-free Reach-Avoid value########## ABS 採用了一種雙策略(Dual Policy)設置,包括一個「敏捷策略」(Agile Policy)和一個「恢復策略」(Recovery Policy)。敏捷策略讓機器人在障礙環境中快速移動,一旦 Reach-Avoid Value Estimation 偵測到潛在危險(例如突然出現的嬰兒車),恢復策略就會介入,確保機器人安全。 ###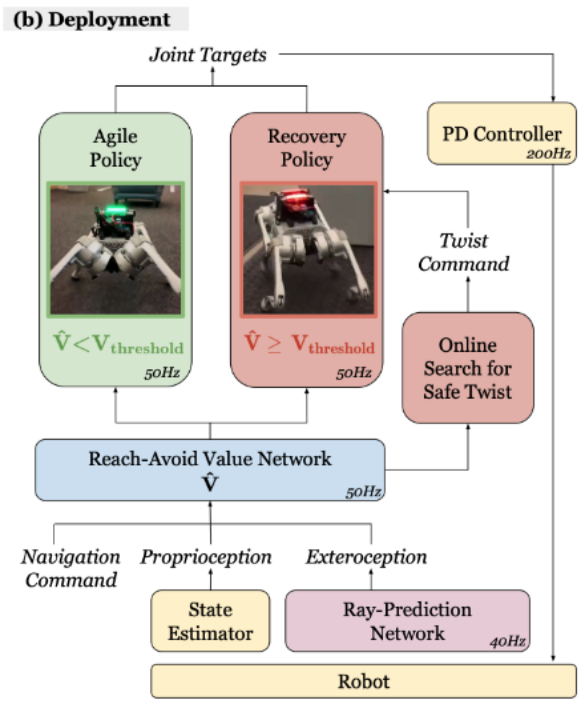
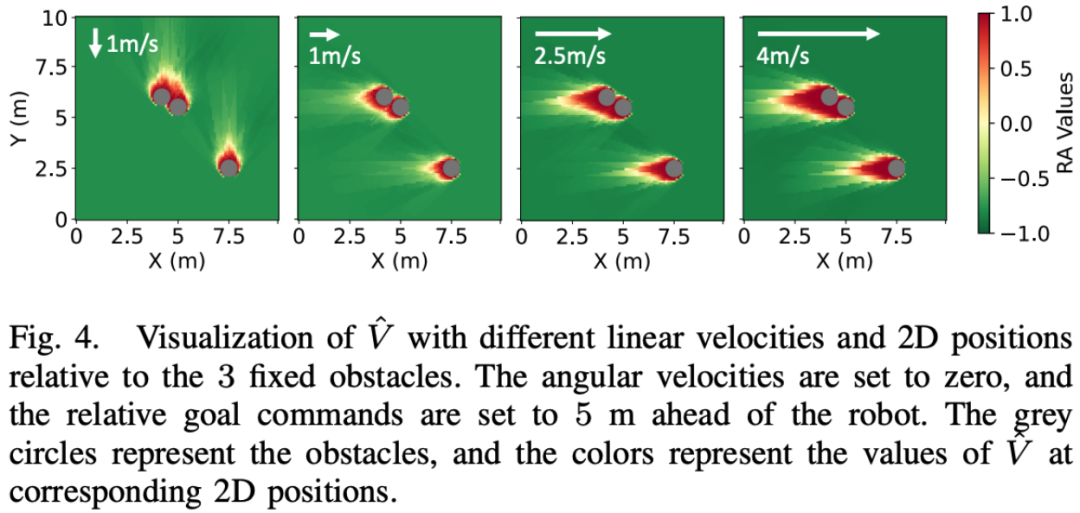
下圖展示了針對特定障礙物集合學習到的 RA(達防)值。隨著機器人速度的變化,RA 值的分佈景觀也隨之改變。 RA 值的符號合理地指示了敏捷策略的安全性。換句話說,這張圖透過不同的 RA 值展示了機器人在不同速度下,面對特定障礙物時的安全風險程度。 RA 值的高低變化反映了機器人在不同狀態下執行敏捷策略時可能遇到的安全風險。
復原策略的創新之處在於,它能使四足機器人快速追蹤線速度和角速度指令,作為備用保護策略。與敏捷策略不同,恢復策略的觀測空間專注於追蹤線速度和角速度指令,不需要外部感知資訊。恢復策略的任務獎勵專注於線性速度追蹤、角速度追蹤、保持存活和保持姿勢,以便平滑切換回敏捷策略。這種策略的訓練同樣在模擬環境中進行,但有特定的域隨機化和課程設置,以更好地適應可能觸發恢復策略的狀態。這種方法為四足機器人提供了在高速運動中快速應對潛在失敗的能力。
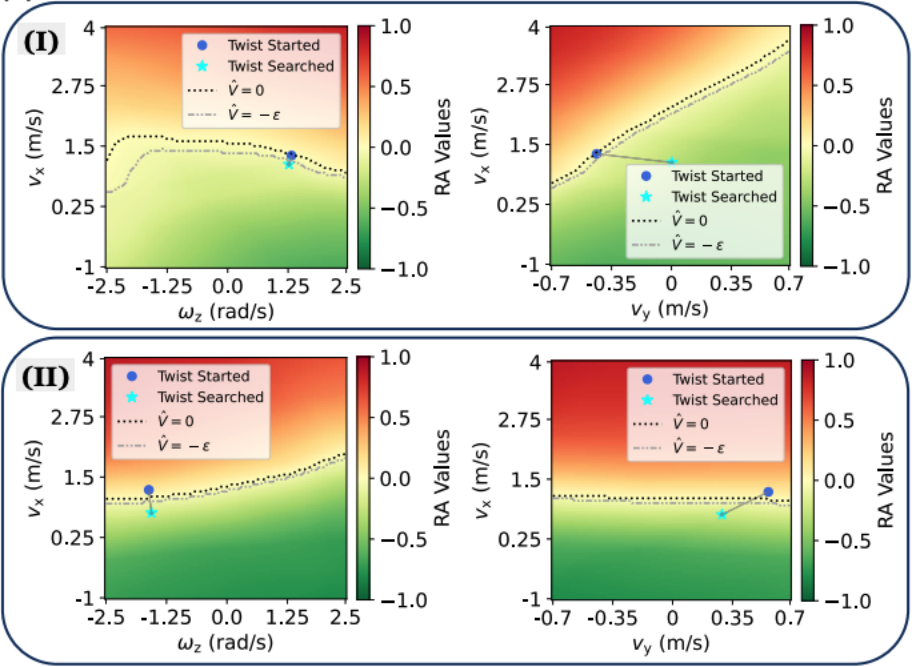
下圖展示了當恢復策略在兩個特定情況(I 和 II)下被觸發時,RA(達防)值景觀的可視化展示。這些視覺化展示是在 vx(沿 x 軸的速度)與 ωz(繞 z 軸的角速度)平面以及 vx 與 vy(沿 y 軸的速度)平面上進行的。圖中顯示了搜尋前的初始旋轉狀態(即機器人基座目前的旋轉狀態)和透過搜尋得到的命令。簡單來說,這些圖表展示了在特定條件下,透過恢復策略搜尋得到的最佳運動指令,以及這些指令如何影響 RA 值,從而反映機器人在不同運動狀態下的安全性。

以上是CMUÐ實現突破:機器狗點滿敏捷值天賦,超高速穿越障礙,速度與安全兼具!的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















