

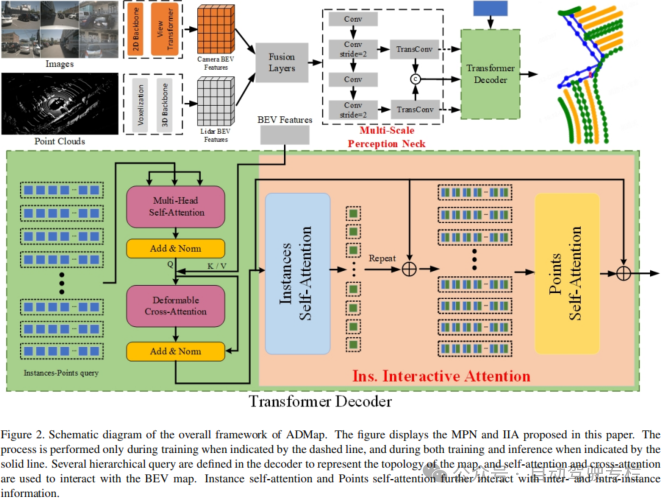
本文介紹了ADMap,這是一種用於重建線上向量化高精地圖的抗干擾框架。在自動駕駛領域,高精地圖的線上重建對於規劃任務至關重要。近年來,已經有多種高性能的高精地圖重建模型被開發出來以滿足這一需求。然而,由於存在預測偏差,實例向量內的點序列可能會出現抖動或鋸齒狀,進而影響後續任務的進行。為此,本文提出了抗干擾地圖重建框架ADMap。 ADMap框架由三個模組組成,分別是多尺度感知neck(MPN)、實例交互注意力(IIA)和向量方向差損失(VDDL)。透過級聯方式探索實例之間和實例內部的點序關係,該模型能夠更有效地監測點序預測過程,從而緩解點序抖動的問題。 實驗證明,ADMap在nuScenes和Argoverse2資料集上實現了最先進的效能。大量的結果表明,在複雜且多變的駕駛場景中,ADMap能夠產生穩定且可靠的地圖元素。這對於自動駕駛系統的安全和準確性至關重要。 總的來說,ADMap是一種創新的抗干擾地圖重建框架,它能夠有效地解決點序抖動問題,並在實際資料集上展現出卓越的效能。這項研究對於推動自動駕駛技術的發展具有重要的意義。
本文的貢獻如下:
1)本文提出了端對端ADMap,它可以重建更穩定的向量化高精地圖;
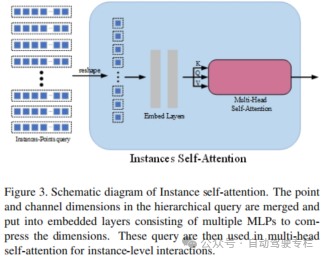
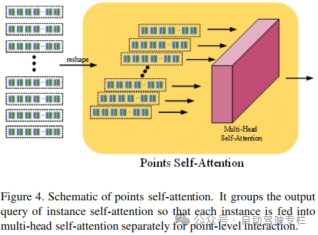
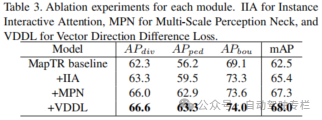
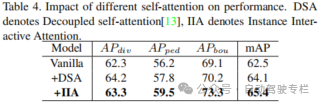
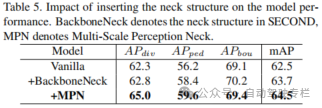
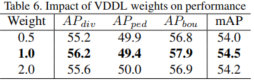
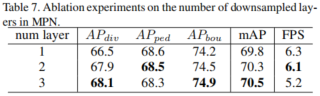
MPN透過不增加運算資源的方式,能夠更精確地捕捉多尺度資訊。而IIA則有效地實現了實例之間和實例內部資訊的交互,從而緩解了實例點位置偏移的問題。另外,VDDL利用拓樸資訊來監督point-order位置的重建過程,並且對向量方向差進行建模。
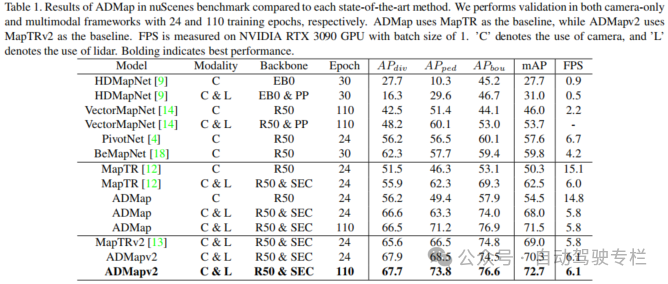
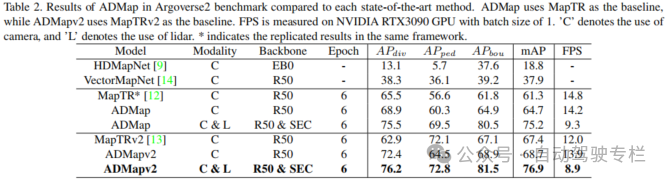
3)ADMap能夠即時重建向量化高精地圖,並且在nuScenes和Argoverse2基準測試中實現了最佳效能。
論文圖片與表格


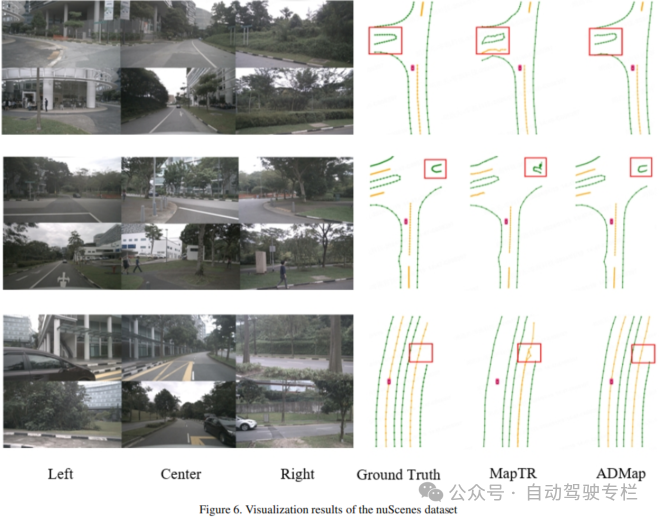
#ADMap是一種有效且有效率的向量化高精地圖重建框架,其透過多尺度感知Neck、實例交互注意力和向量方向差損失這三個模組,有效地緩解了實例點抖動造成的地圖拓樸失真問題。大量實驗表明,本文所提出的方法能夠在nuScenes和Argoverse2基準上獲得最佳性能,其高效性也得以驗證。我們相信,ADMap可以幫助社群推動有關向量化高精地圖重建任務的研究,以更好地發展自動駕駛等領域。

原文連結:https://mp.weixin.qq.com/s/O0BoiJZwIQmeeChUZkMMng
以上是抗干擾框架ADMap:重建線上向量化高精地圖的利器的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















