本文經自動駕駛之心公眾號授權轉載,轉載請聯絡來源。
原標題:MotionLM: Multi-Agent Motion Forecasting as Language Modeling
論文連結:https://arxiv.org/pdf/2309.16534.pdf
#作者單位: Waymo
會議:ICCV 2023
#論文想法:
##對於自動駕駛車輛安全規劃來說,可靠地預測道路代理未來行為是至關重要的。本研究將連續軌跡表示為離散運動令牌序列,並將多智能體運動預測視為語言建模任務。我們提出的模型MotionLM有以下幾個優點:首先,它不需要使用錨點或顯式潛變數來最佳化學習多模態分佈。相反,我們利用標準的語言建模目標,最大化序列令牌的平均對數機率。其次,我們的方法避免了事後交互啟發法,其中個體代理軌跡生成是在交互評分之後進行的。相反,MotionLM在單一自回歸解碼過程中產生了互動式代理未來的聯合分佈。此外,模型的順序分解可以實現時間上的因果條件推論。我們提出的方法在Waymo Open Motion Dataset上取得了新的最先進性能,排名第一於互動式挑戰排行榜
主要貢獻:
在這在篇文章中,我們將多智能體運動預測作為語言建模任務來討論。我們引入了時間因果解碼器,對經過因果語言建模損失訓練的離散運動令牌進行解碼
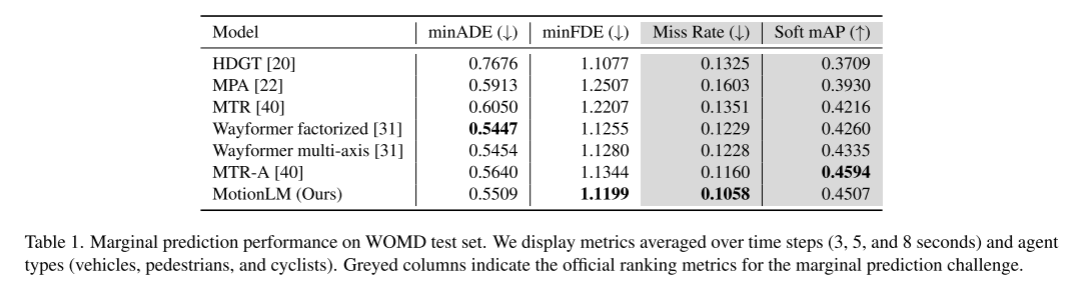
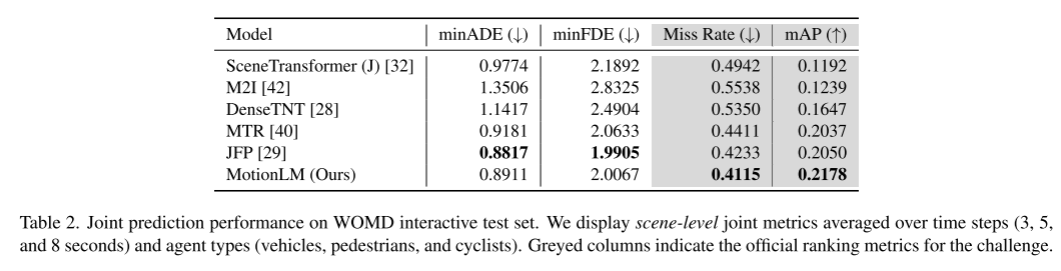
本文將結合模型中的取樣和簡單的rollout 聚合方案,以提高聯合軌蹟的加權模式識別能力。我們透過Waymo Open Motion Dataset 互動預測挑戰中的實驗,證明了這項新的方法在排名聯合mAP 指標上提高了6%,達到了最先進的性能水平
本文對本文的方法進行了廣泛的消融實驗,並對它的時間因果條件預測進行了分析,這在很大程度上是目前的聯合預測模型所不支持的。
網路設計:
本文的目標是以一種通用的方式對多智能體互動上的分佈建模,這種分佈可以應用於不同的下游任務,包括最低限度的、聯合的和條件預測。為了實現這一目標,需要一個有表現力的生成框架,能夠捕捉到駕駛場景中的多種形態。此外,本文在這裡考慮保存時間依賴性;即,在本文的模型中,推理遵循一個有向無環圖,每個節點的父節點在時間上較早,子節點在時間上較晚,這使得條件預測更接近因果幹預,因為它消除了某些虛假的相關性,否則就會導致不服從時間因果關係。本文觀察到,不保留時間依賴關係的聯合模型可能在預測實際agent反應方面的能力有限,這是規劃中的關鍵用途。為此,本文利用了未來解碼器的自回歸分解,其中代理的運動tokens有條件地依賴所有先前採樣的tokens,並且軌跡按順序推出
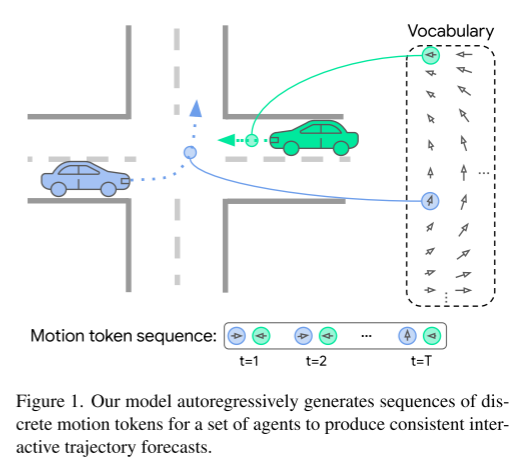
圖1。本文的模型自回歸地為一組代理程式產生離散運動tokens序列,以產生一致的互動式軌跡預測。
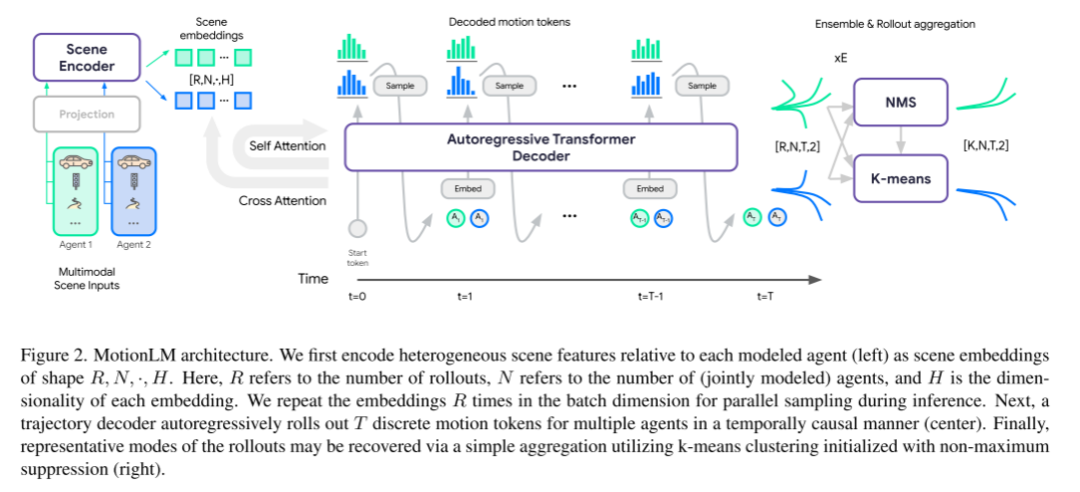
請看圖2,這是MotionLM的架構
#本文首先將與每個建模代理相關的異質場景特徵(左)編碼為形狀R、N、·、H的場景嵌入。其中,R為首次推出(rollouts)的數量,N為聯合建模的代理數量,H為每次嵌入的維數。在推理過程中,為了並行取樣,本文在批次維度上重複嵌入R次。接下來,一個軌跡解碼器以一種時間因果的方式(中心)為多個代理推出(rolls out) T 個離散運動tokens。最後,透過使用非最大抑制初始化的k-means聚類的簡單聚合,可以恢復 rollouts 典型模式(右圖)。
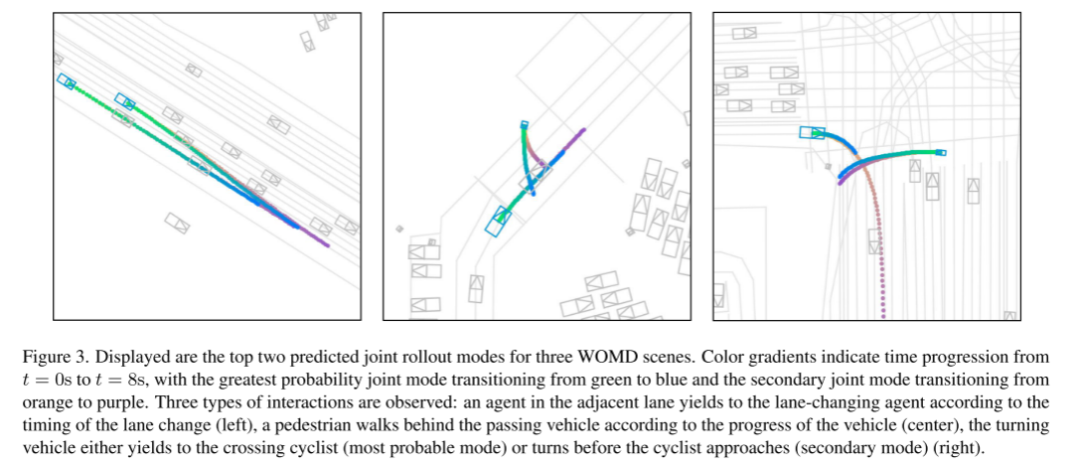
圖3。展示了三個WOMD場景的前兩種預測聯合推出(joint rollout)模式。
顏色梯度表示了從t = 0秒到t = 8秒的時間變化。聯合模式由綠色過渡到藍色,次聯合模式由橙色過渡到紫色的機率最大。我們觀察到了三種類型的交互:相鄰車道中的智能體會根據變換車道時間給予變換車道智能體讓行(左側),行人會根據車輛的進度走在過往車輛後面(中間),轉彎車輛要么會給過路的騎車人讓路(最可能的模式),要么會在騎車人接近之前轉彎(次要模式)(右側)
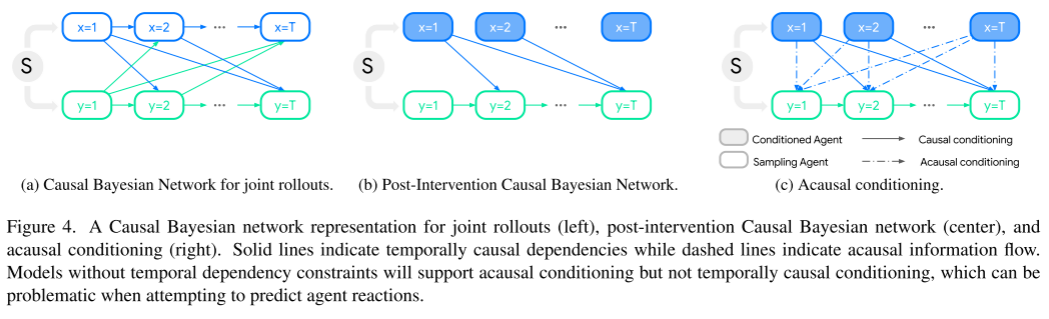
請看圖4。這張圖展示了聯合推出(左側)、幹預後因果貝葉斯網絡(中間)和因果條件反射(右側)的因果貝葉斯網絡表示
#實線表示時間上的因果相關性,而虛線表示因果訊息流。沒有時間依賴限制的模型將支持因果條件作用,但不支持時間因果條件作用,這在試圖預測agent反應時可能是有問題的。
實驗結果:

#Seff, A., Cera, B., Chen, D., Ng, M., Zhou, A., Nayakanti, N., Refaat, K. S., & Sapp, B. (2023). MotionLM: Multi-Agent Motion Forecasting as Language Modeling. ArXiv. /abs/2309.16534

原文連結:https://mp.weixin.qq.com/s/MTai0rA8PeNFuj7UjCfd6A
#
以上是MotionLM:多智能體運動預測的語言建模技術的詳細內容。更多資訊請關注PHP中文網其他相關文章!























