

人工智慧又一次擊敗了人類世界冠軍,這次是在無人機競速領域。
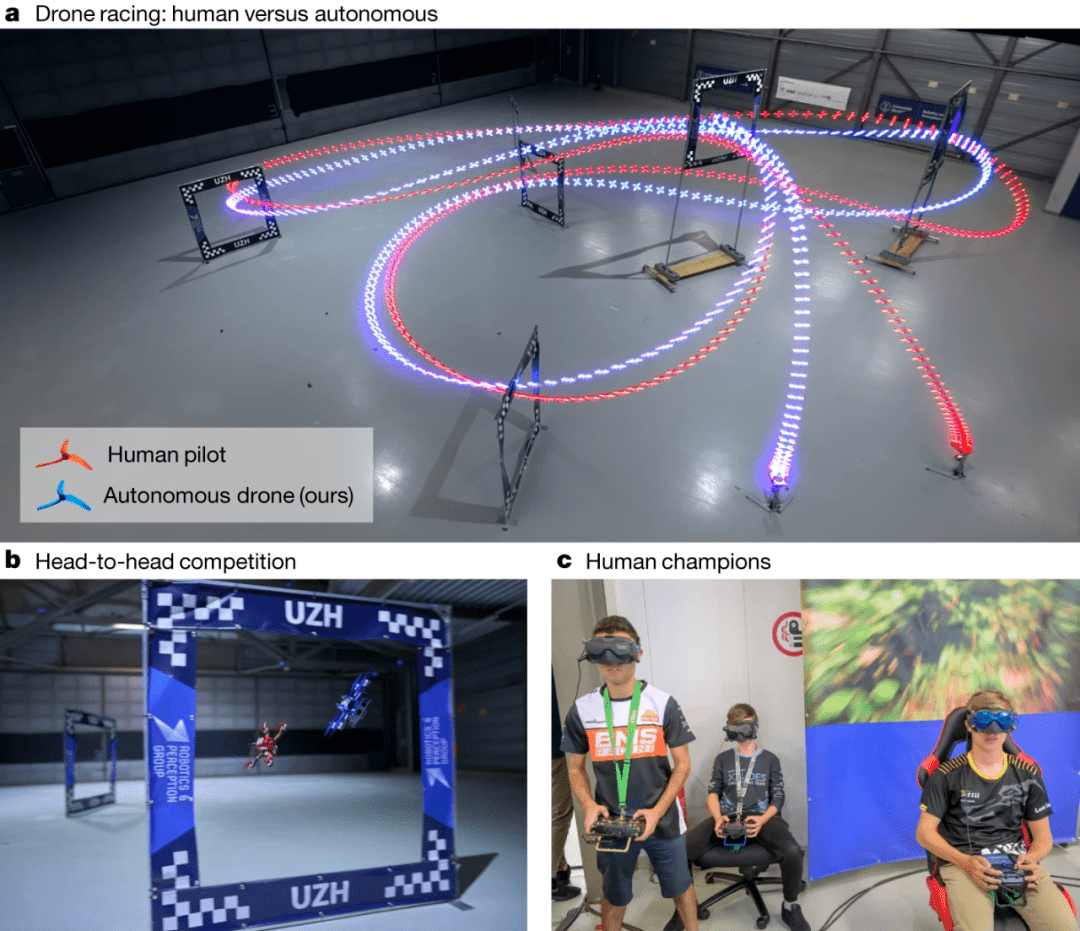
這項重大成果由瑞士蘇黎世大學的工程師團隊在《Nature》和《Science Robotics》雜誌上發表。在2011年的第一場與人工智慧無人機比賽之後,直到Swift出現之前,還沒有一款自主操控的無人機能夠擊敗人類飛行員。 Swift擊敗了世界冠軍級的人類玩家,包括2019年無人機競速聯盟世界冠軍Alex Vanover、兩屆MultiGP國際公開賽冠軍Thomas Bitmatta和三屆瑞士全國冠軍Marvin Schaepper
在虛擬領域中,人工智慧已經在西洋棋、跳棋、圍棋和星海爭霸等遊戲中戰勝了人類。現在,它首次在物理挑戰中也成功戰勝了人類
這段內容的重寫如下:這場比賽是由裝備高解析度攝影機的"第一人稱視角"(FPV)無人機進行的。 《Science Robotics》雜誌上發表了一篇文章,詳細介紹了"雨燕"(Swift)無人機開發團隊取得的歷史性勝利。在與三位無人機競技選手激烈競爭的過程中,該款無人機在25項挑戰中獲得了15項的勝利。該項目負責人表示,"我們的成果標誌著首次有由AI驅動的機器人,在一項為人類設計並由人類主導的真實體驗賽事中擊敗人類。」

"雨燕"(Swift)無人機成功秘訣在於其強大的人工神經網絡,能夠優化無人機的航線和速度。它透過機載攝影機即時收集環境細節,為無人機提供精確的引導,而人類飛行員則依賴傳輸到耳機的視訊訊號,體驗"第一人稱視角"。
在這場無人機比賽中,人類操縱者透過機載攝影機操縱無人機通過3D賽道。 Swift系統的創新之處在於能夠將無人機的狀態對應到調整推力和旋轉速率的指令。這項成果是移動機器人和機器智慧領域的里程碑。

Swift技術介紹
#Swift是一個四旋翼飛行器,它僅透過機載感測器和計算來實現自主控制。此飛行器由兩個關鍵模組組成:
其中,控制策略的表示採用前饋神經網絡,並使用無模型的on-policy深度強化學習(RL)進行訓練
鑑於模擬和現實世界在感測和動力學方面存在差異,僅在模擬中優化策略會導致無人機的實際性能較差。因此,研究團隊決定利用從物理系統收集的數據來估計非參數經驗雜訊模型
研究結果顯示,這些經驗噪音模型對於將控制策略從模擬成功地轉移到現實中起到了積極的作用
具體而言,Swift將飛行器上的感測器讀數轉換為控制命令,這個轉換過程包括兩個部分:
(1) 觀察策略,將高維度的視覺和慣性訊息提煉成特定於任務的低維編碼;
(2) 控制策略,將編碼轉換成無人機指令。
在Swift記錄的10次失利中,40%是因為與對手相撞,40%是因為與競賽門相撞,20%是因為比人類控制的無人機慢。總體而言,在與人類控制無人機進行的比賽中,Swift獲勝次數最多,並且它還創造了最快的比賽紀錄,比人類控制無人機(A. Vanover)的最佳時間快了半秒。
雖然從整體上看,Swift比所有人類控制無人機都要快,但它在賽道的每個賽段上的速度並不快。
研究團隊仔細分析發現:在起飛時,Swift的反應時間較短,平均比人類飛行員早120毫秒起飛;Swift的加速也更快,進入第一個競賽門時速度更高。在急轉彎時,Swift的動作更加緊湊。
研究團隊也提出了一個假設,Swift在比人類操控者更長的時間尺度上優化軌跡。眾所周知,無模型強化學習可以透過優化長期獎勵來實現。相較之下,人類操控者規劃運動的時間尺度較短,最多只能預測未來一個競賽門
以上是Swift無人機在FPV賽事中透過AI技術擊敗人類頂級玩家的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















