

5月31日,錒極科技重磅發表全地形磁吸附爬壁機器人。該機器人是國內首次公開亮相能解決爬壁機器人高空作業、越障以及實現內外折角跨越的創新產品,可望解決船舶、化工等重工業領域高空爬壁作業剛需,打開我國高空自動化作業新局面。
鈮極科技是上海交通大學科技成果轉化專案公司,與綠的諧波旗下的開旋動力、鈞微動力、賽威德等公司合作密切,以爭做全球壁面移動機器人領導者為己任。
本次錒極發布的爬壁機器人參數非常優越,具備高達2:1負載/自重比,該款爬壁機器人能夠輕鬆搭載一台協作機器人進行高空作業,完成高空焊接、打磨等複雜的爬壁作業,此技術成功彌補了國內複雜環境高空作業市場空白,核心技術達到國際水準。

圖1、機器人從立面到倒立面
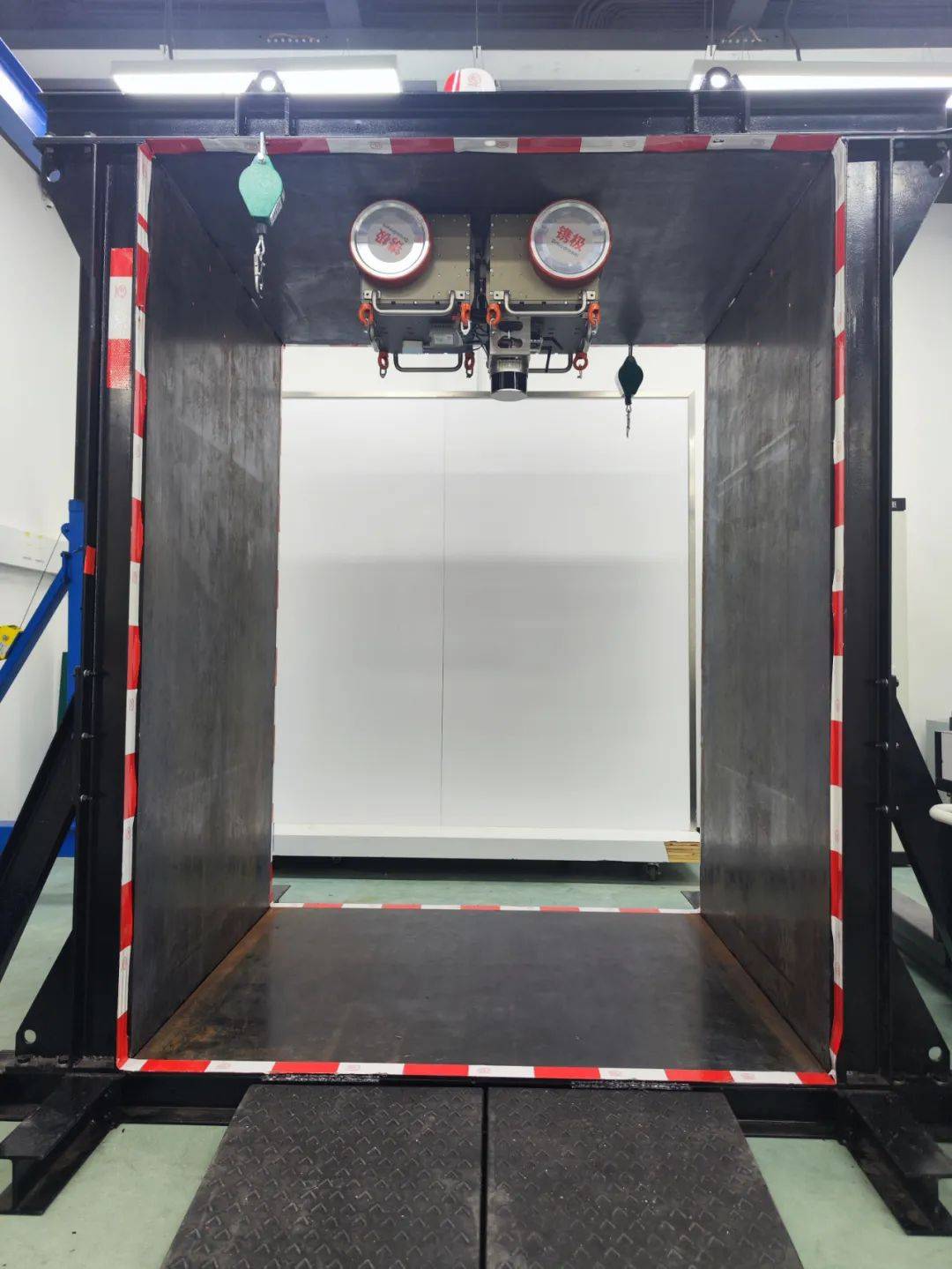
圖2、機器人在倒立面運動
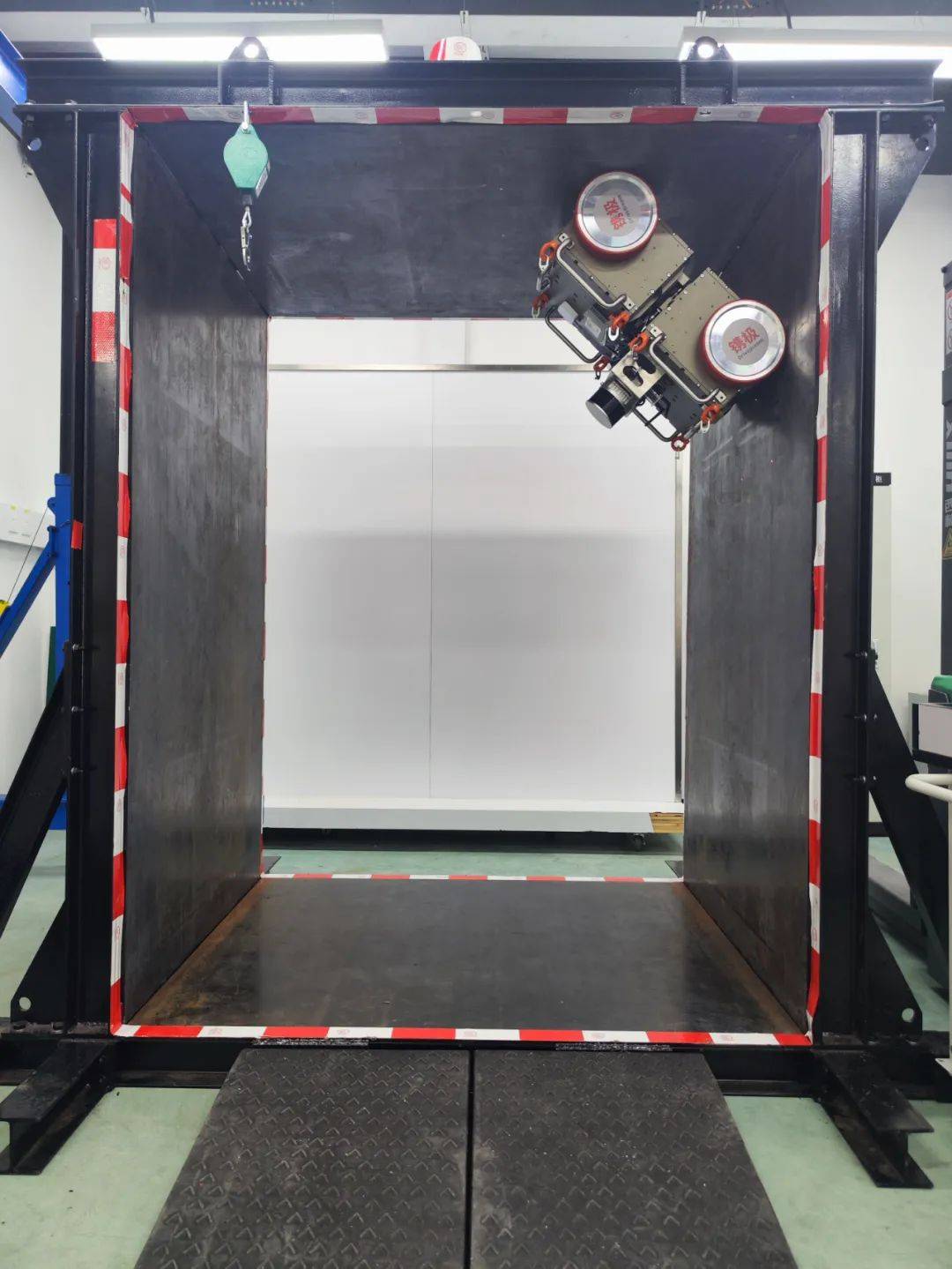
圖3、機器人從倒立面到立面
此產品背後,是錒極為機器人產品創新開創的複雜壁面全地形適應技術,機器人本體基於自主研發的大磁隙永磁吸附技術與陣列化大負載磁吸技術設計成,結合磁吸力感知調節與預警的創新方法,在四輪框內爬壁平台與五輪可變形爬壁機構基礎上優勢互補,在性能上突破了輪式爬壁移動機器人運動極限,首次完成內外折角及越障功能全覆蓋,從而實現了機器人在高空作業的高移動能力、高適應能力、高通過能力、高負載能力,在國際上首次解決了複雜三維壁面爬壁作業難題。
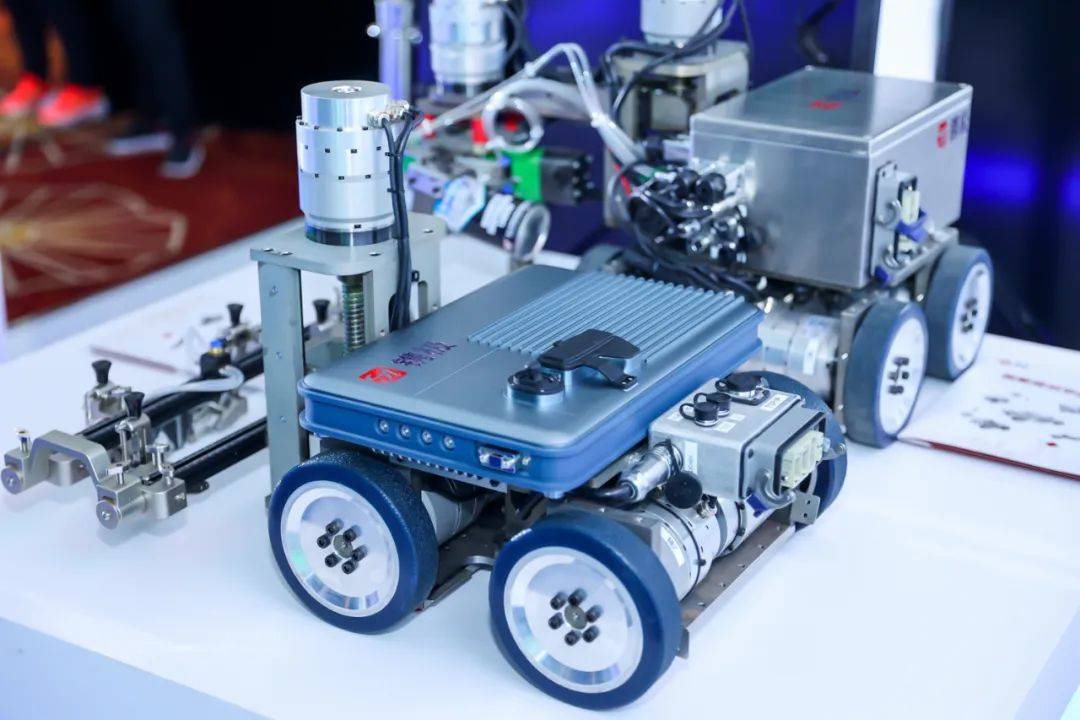
圖4、四輪 六軸移動打磨爬壁機器人


圖5、五輪全地形爬壁機器人正在翻越外折角
以造船、石化等高端行業的部分場景為例,錒極爬壁機器人系統能夠攜帶機器人及末端操作設備在空中提供自動化作業可能,並根據客戶需求提供涵蓋軟硬體、演算法及服務的綜合解決方案,完成高空場景的多個工藝一體化作業。我們的高空機器人產品在功能、性能和服務方面與市場上其他產品實現了顯著的差異化。
在實際應用中,錒極爬壁機器人可以利用多種感測器資訊即時建立複雜環境地圖、定位位置、規劃路徑並自主做出決策。同時,由於錒極爬壁機器人也具備環境感知與避障、補償力回饋機制賦予強越障能力,當機器人遇到複雜地形,可自主調整輪面以增加環境適應性,且藉助力磁耦合設計及控制演算法實現,使整機維持極高綜合負載能力條件下能耗最優。這使得錕極爬壁機器人具有不同複雜曲面適應力,能夠更好實現複雜壁面作業,也意味著機器人能夠輕鬆切入罐體、船舶等行業的焊接、塗裝、打磨、檢測等全新領域,提供高效能、高精度且高度智慧化的全新解決方案。
未來錒極爬壁機器人將主要針對重大工業領域提供機器人應用與解決方案,特別是在高空、密閉環境等危險作業環境,能透過機器人系統來幫助企業實現高空作業自動化,提高作業安全性、效率和品質。可望用於例如造船、石化、水力發電、火力發電、風電、核電等行業的船舶內部檢修、儲罐外表檢測、大型鋼結構、水冷壁、風塔等高空作業等。
據了解,錒極該款爬壁機器人主要透過與綠的諧波、上海交通大學進行「產學研用」合作開發,在研發過程中,重點攻克了精密減速器、馬達、伺服系統、 EHA等領域的部分卡脖子難題,讓產品國產化率逐步提升。錒極爬壁機器人現在採用全部國產自研零件作為關鍵核心組件,這樣就確保了採購成本和關鍵零件的品質完全在自己的掌控之中。
圖6、小四輪爬壁偵測機器人
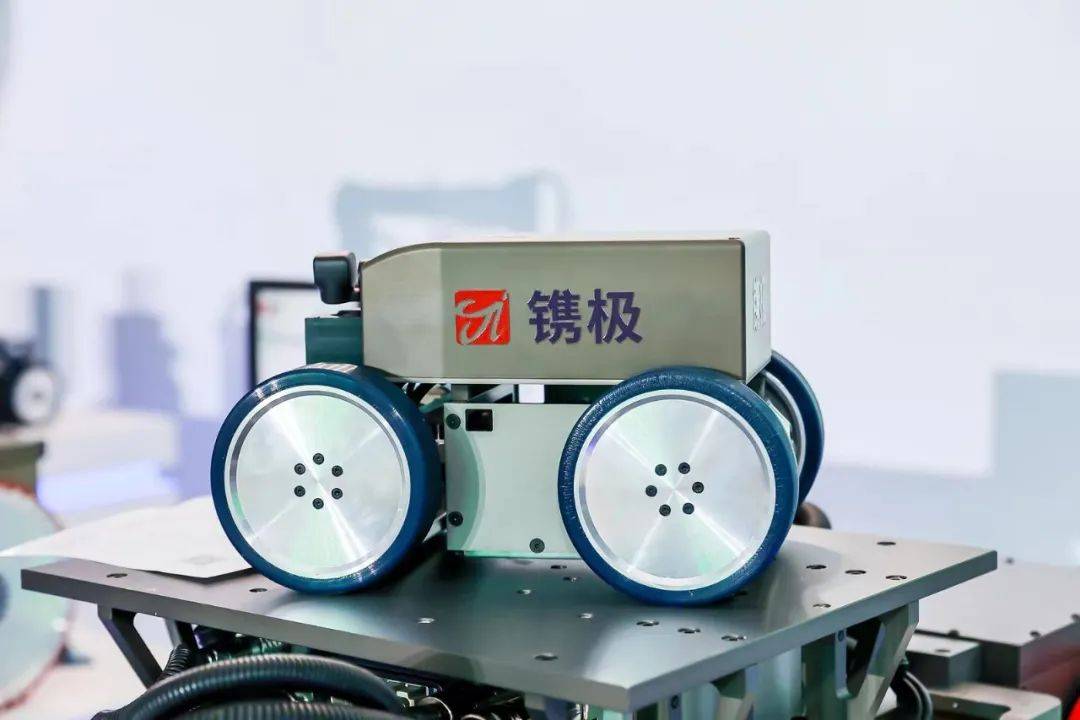
圖7、相控陣四輪爬壁偵測機器人
上海交通大學機器人研究所副所長、錒極科技聯合創始人趙言正教授表示,未來錒極將繼續加大研發投入,跟隨產業技術發展趨勢,持續創新產品與方案,增強機器人在自主導航能力、負載穩定性、遙控操作等方面效能,不斷提升產品的智慧與綜合效能,最終走向全球高階市場。
機器人可以取代全球高空作業市場約50-70%的工作,該市場規模超過200億美元。這種永磁吸附爬壁機器人可以完全滿足這個領域的需求,市場潛力高達數十億美元。據悉,鐫極目前已取得某一市場訂單,未來可望佔領尚處空白的國內市場,並與國際企業同台競技。
以上是國產機器人在高空領域挑戰極限,爭取爬壁作業王者的詳細內容。更多資訊請關注PHP中文網其他相關文章!


































