

機器之心報道
#編輯:小舟、梓文
走兩步,沒事走兩步。
在機器人領域,特斯拉的人形機器人一直備受關注。
2021 年,在「特斯拉 AI 日」上,馬斯克發布了特斯拉的通用機器人計劃,並用圖片展示了人形機器人 Tesla Bot 的大致形態。
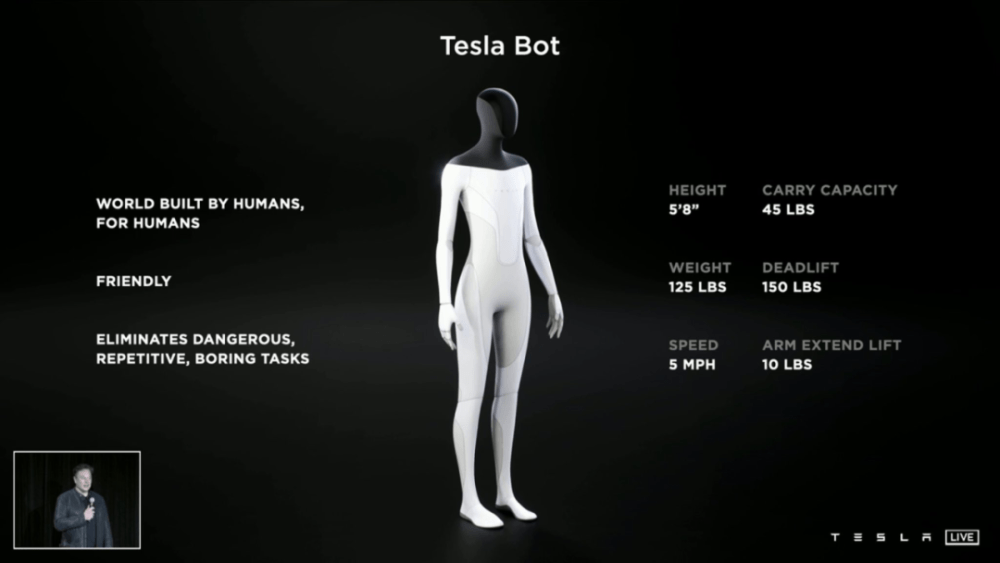
2021 年馬斯克在「特斯拉 AI 日」上展示了 Tesla Bot 的大致形態。
但當時的 Tesla Bot 只是個概念,動作展示部分是由工作人員穿著特製的緊身服裝,扮成機器人的模樣表演了一段舞蹈。一年後在 2022「特斯拉 AI 日」上,人形機器人擎天柱(Optimus)實體亮相,緩緩走出並和觀眾打了個招呼。
2022 年 Optimus 在「特斯拉 AI 日」上亮相。
初次亮相的 Optimus 在沒有連線或後援的情況下,只能簡單走幾步。最近,在特斯拉股東大會上,馬斯克又展示了 Tesla Bot 的最新進展。現在 Tesla Bot 已經可以流暢走路了:
也可以幾個機器人一起往前走:
除了行走,特斯拉的人形機器人現在還能靈活抓取放下物體:
從概念到基本上具備行走和抓取物體的能力,我們來看看特斯拉兩年來做了哪些技術改進。
技術方法
在特斯拉最新發布的影片中,我們可以發現特斯拉利用一些技術方法改進了人形機器人的動作和控制,包括馬達扭矩控制、環境發現與記憶、基於人類演示訓練機器人。
馬達扭力控制
#首先,研究團隊使用馬達扭力控制(motor torque control)操縱人形機器人腿部的運動,讓機器人「落腳」力道保持輕緩。

影片展示了使用這種控制方法,機器人的動作甚至無法打破雞蛋,這說明機器人的「腳步很輕」:
環境發現與記憶
#對於一個機器人來說,觀察或感知周圍環境是非常重要的。特斯拉為人形機器人添加了環境發現與記憶的能力。現在,該人形機器人已經可以對周圍環境進行大致建模:

基於人類演示訓練機器人
#特斯拉的人形機器人具備與人類相似的身體結構。特斯拉的研究團隊使用大量人類演示訓練了機器人,特別是在手部動作方面,旨在讓其具備與人類類似的物體抓取能力:
展示一個輕鬆抓取物件:
目前,特斯拉已經展示了人形機器人的基本能力,包括行走和抓取物體,該公司將對該機器人做更多技術改進,預計在不遠的將來投入量產。
參考連結:
https://www.theverge.com/2023/5/16/23726139/tesla-robot-update-video-shareholder-meeting
https://www.youtube.com/watch?v=XiQkeWOFwmk
以上是特斯拉的人形機器人出來走了兩步,還能抓東西了的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















