

您有沒有想過無人機如何在複雜的環境中導航?在本部落格中,我們將使用 Python、Matplotlib 和 A* 演算法來建立一個簡單的無人機導航系統。最後,您將擁有一個可以視覺化無人機解決迷宮的工作系統!
要建造我們的無人機導航系統,我們需要以下內容:
但首先,讓我們為新手快速回顧一些基本的人工智慧術語。
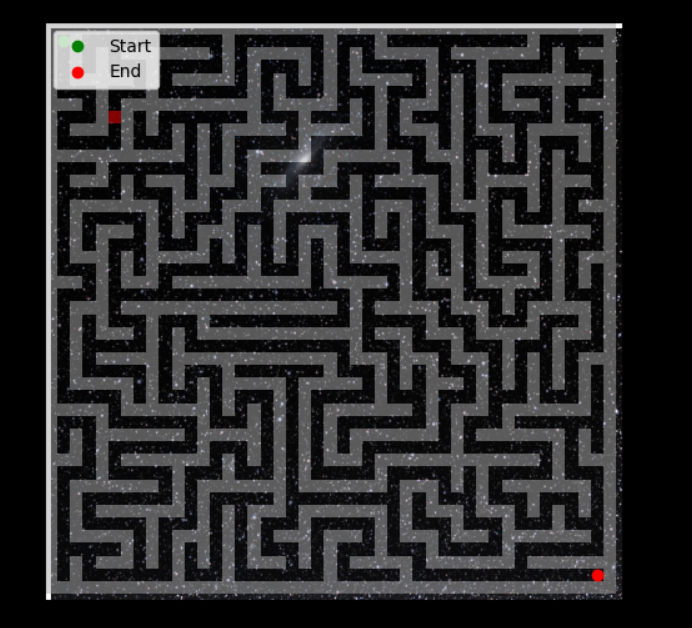
我們的無人機將在二維迷宮中導航。迷宮將包括:
無人機的目標:
這是迷宮的樣子:
首先,安裝並匯入所需的庫:
import matplotlib.pyplot as plt import numpy as np import random import math from heapq import heappop, heappush
讓我們定義迷宮大小:
蟒蛇
寬度、高度 = 22, 22
在現實世界的導航中,不同方向的移動可能會產生不同的成本。例如,向北移動可能比向東移動更困難。
DIRECTIONAL_WEIGHTS = {'N': 1.2, 'S': 1.0, 'E': 1.5, 'W': 1.3}
DIRECTIONS = {'N': (-1, 0), 'S': (1, 0), 'E': (0, 1), 'W': (0, -1)}
我們從一個充滿牆壁的網格開始(1s):
import matplotlib.pyplot as plt import numpy as np import random import math from heapq import heappop, heappush
麻木的。 Ones() 函數用於建立給定形狀和類型的新數組,並用 1 填充...在使用預設值初始化數組時很有用。
現在讓我們定義一個函數,它將「雕刻」在迷宮中開闢路徑,迷宮現在只用牆壁初始化
DIRECTIONAL_WEIGHTS = {'N': 1.2, 'S': 1.0, 'E': 1.5, 'W': 1.3}
DIRECTIONS = {'N': (-1, 0), 'S': (1, 0), 'E': (0, 1), 'W': (0, -1)}
maze = np.ones((2 * WIDTH + 1, 2 * HEIGHT + 1), dtype=int)
使用Matplotlib顯示迷宮:
def carve(x, y):
maze[2 * x + 1, 2 * y + 1] = 0 # Mark current cell as a path
directions = list(DIRECTIONS.items())
random.shuffle(directions) # Randomize directions
for _, (dx, dy) in directions:
nx, ny = x + dx, y + dy
if 0 <= nx < WIDTH and 0 <= ny < HEIGHT and maze[2 * nx + 1, 2 * ny + 1] == 1:
maze[2 * x + 1 + dx, 2 * y + 1 + dy] = 0
carve(nx, ny)
carve(0, 0) # Start carving from the top-left corner
A* 演算法 使用路徑成本和啟發式的組合來找出加權迷宮中的最短路徑。
我們使用歐幾里德距離作為我們的啟發式:
start = (1, 1) end = (2 * WIDTH - 1, 2 * HEIGHT - 1) maze[start] = 0 maze[end] = 0
fig, ax = plt.subplots(figsize=(8, 6))
ax.imshow(maze, cmap='binary', interpolation='nearest')
ax.set_title("2D Maze")
plt.show()
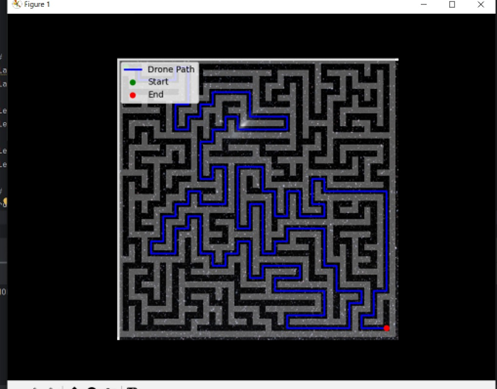
我們已經有了迷宮,但你還看不到無人機的路徑。
讓我們可視化無人機的路徑:
def heuristic(a, b):
return math.sqrt((a[0] - b[0]) ** 2 + (a[1] - b[1]) ** 2)
恭喜! ?您已經建造了一個可用的無人機導航系統:
請隨時分享您的結果或在下面的評論中提出問題。
到無限甚至更遠?
以上是使用 matplotlib 和 A* 演算法建構無人機導航系統的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















