

大模型對現實世界,可以形成自己的理解!
MIT 的一項研究發現,隨著模型能力越強,它對現實的理解可能不僅是簡單模仿。
例如大模型沒有聞過氣味,是否就代表它不能理解氣味?
研究發現,它可以自發性模擬一些概念,方便理解。
這項研究意味著,大模型未來有希望更深入理解語言和世界,論文已被頂會 ICML 24 接收。
這篇論文的作者是 MIT 電腦與人工智慧實驗室(CSAIL)華裔博士生 Charles Jin 和他的指導教授 Martin Rinard 教授。
研究當中,作者讓大模型只學習程式碼文本,結果發現模型逐漸掌握了背後的意義。
Rinard 教授表示,這項研究直接針對現代人工智慧的一個核心問題——
大模型的能力僅僅是由於大規模的統計相關性,還是對它們要處理的現實問題產生了有意義的理解?
△來源:MIT 官網
同時這項研究也引發了不少討論。
有網友表示,雖然大模型對語言的理解可能和人類不同,但這項研究至少說明了模型做的絕不是對訓練資料的記憶。
讓大模型學習純程式碼
為了探究大模型能否產生語意層面的理解,作者建構了一個由程式碼及其對應輸入輸出組成的合成資料集。
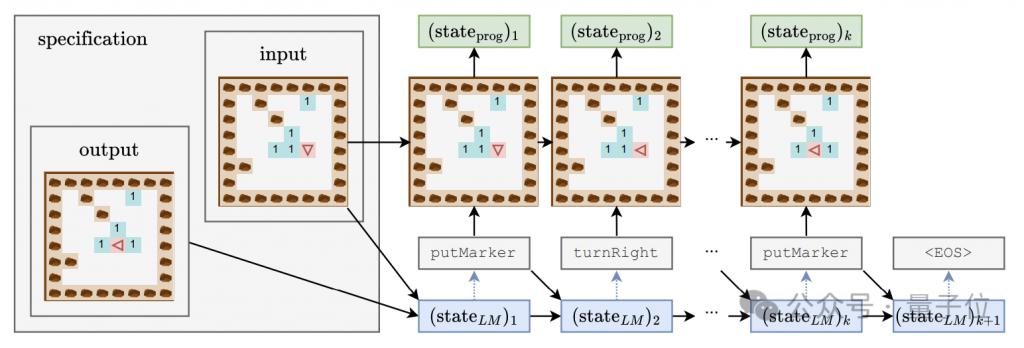
這些程式碼程式是用一種名為Karel的教學語言編寫,主要用於實現機器人在 2D 網格世界中導航的任務。
這個網格世界由 8x8 的格子組成,每個格子可以包含障礙物、標記物或空地。機器人可以在格子間移動,並進行放置 / 拾取標記物等操作。
Karel 語言包含5 個原始操作- move(前進一步)、turnLeft(左轉90 度)、turnRight(右轉90 度)、pickMarker(拾取標記物)、putMarker(放置標記物),程式就是由這些原始操作的序列組成。
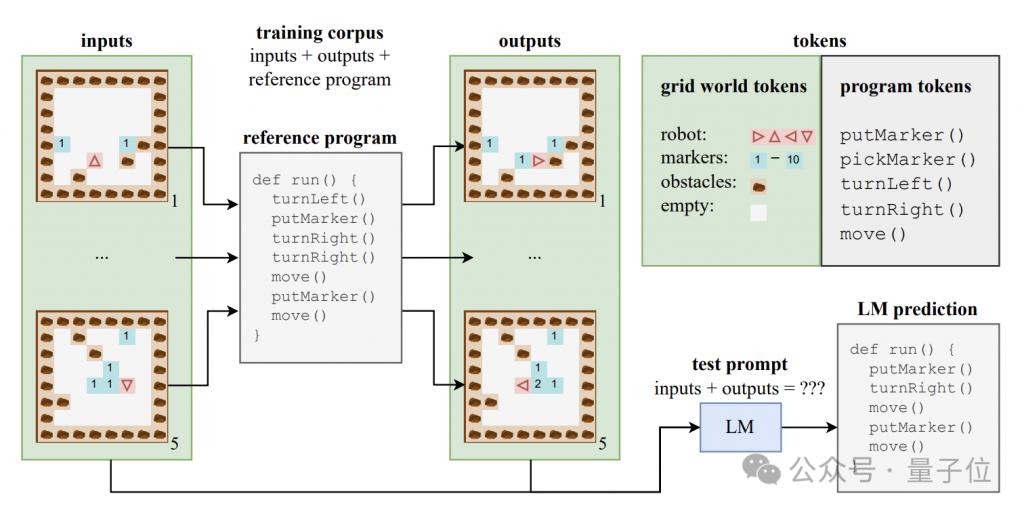
作者隨機產生了一個包含 50 萬個 Karel 程式的訓練集,每個程式長度在 6 到 10 之間。
每個訓練樣本由三個部分組成:5 個輸入狀態、5 個輸出狀態和完整的程式碼,輸入輸出狀態以特定格式編碼進字串中。
利用這些數據,作者訓練了標準 Transformer 架構的 CodeGen 模型的一個變體。
訓練過程中,模型可以存取每個樣本中的輸入輸出資訊和程式前綴,但看不到程式執行的完整軌跡和中間狀態。
除了訓練集,作者還建立了一個包含 1 萬個樣本的測試集,用於評估模型的泛化表現。
為了研究語言模型是否掌握了代碼背後的語義,同時深入了解模型的 " 思維過程 ",作者設計了一套包含線性分類器和單 / 雙隱層 MLP 的探測器組合。
探測器的輸入是語言模型在生成程式tokens 過程中的隱藏狀態,預測目標則是程式執行的中間狀態,具體包括機器人的朝向(direction)、相對於初始位置的偏移量(position)以及是否正面朝向障礙物(obstacle) 這三個特徵。
在生成模型的訓練過程中,作者每隔 4000 步記錄一次上述三個特徵,並同時記下生成模型的隱藏狀態,形成探測器的訓練資料集。
大模型學習的三個階段
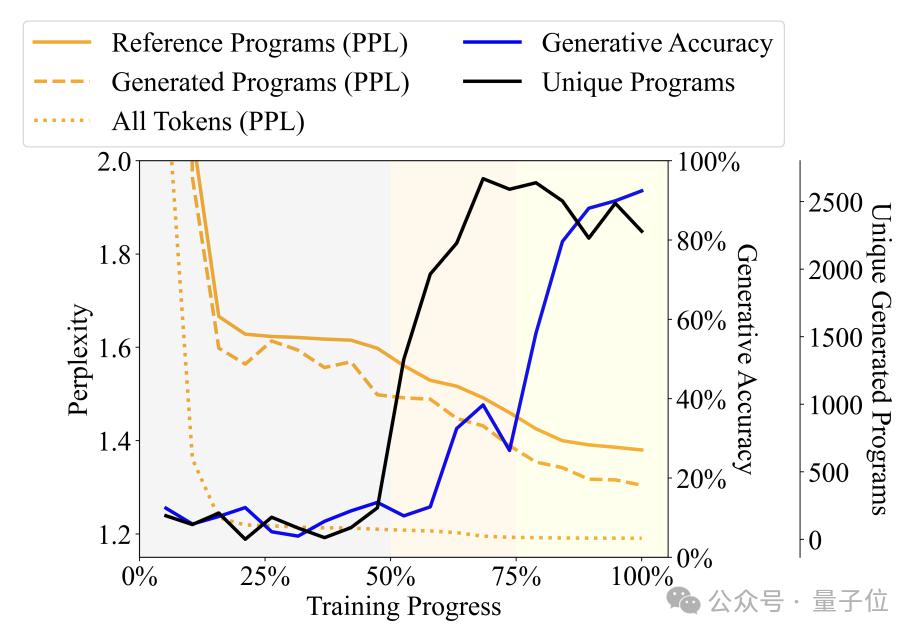
透過觀察語言模型產生的程序的多樣性、困惑度等指標隨訓練進程的變化,作者將訓練過程分為了三個階段-
Babbling(隨訓練過程的變化,作者將訓練過程分為了三個階段-
Babbling(隨訓練過程的變化,作者將訓練過程分為了三個階段-
Babbling(胡言亂語)階段:輸出程式重複度高,偵測器準確率不穩定。
語法習得階段:程式多樣性迅速提高,生成準確率小幅提升,困惑度下降,說明語言模型習得了程式的句法結構。 語意習得階段:程式多樣性和句法結構掌握程度平穩,但產生準確率和偵測器效能大幅提升,說明語言模型習得了程式的語意。具體來說,Babbling 階段佔據了整個訓練過程的前50%,例如在訓練到20% 左右的時候,無論輸入什麼規範,模型都只會產生一個固定的程序- "pickMarker" 重複9 次。
語法習得階段處於訓練過程的50% 到75%,模型在Karel 程序上的困惑度顯著下降,表明語言模型開始更好地適應Karel 程序的統計特性,但生成程式的準確率提升幅度不大(從10% 左右提升到25% 左右),仍無法準確完成任務。
語意習得階段是最後的 25%,程式的準確率出現了急劇提升,從 25% 左右提升到 90% 以上,產生的程式能夠準確地完成給定的任務。
進一步實驗又發現,探測器不僅可以對 t 時刻的同時間步進行預測,還能預測後續時間步的程序執行狀態。
舉例來說,假設生成模型在 t 時刻產生了 token"move",並將在 t+1 時刻產生 "turnLeft"。
同時,t 時刻的程式狀態是機器人面向北方,位於座標 ( 0,0 ) ,而 t+1 時刻機器人將是機器人將面向西方,位置不變。
如果探測器能夠從語言模型在t 時刻的隱藏狀態中,成功預測到t+1 時刻機器人會面向西方,就說明在生成"turnLeft" 之前,隱藏狀態就已經包含了這項操作帶來的狀態變化訊息。
這一現象說明,模型並非只對已生成的程序部分有語義理解,而是在生成每一步時,就已經對接下來要生成的內容有所預期和規劃,顯現出了初步的面向未來的推理能力。
但這一發現又為這項研究帶來了新的問題——
實驗中觀察到的準確度提升,到底真的是生成模型進步了,還是探測器自己推論的結果呢?
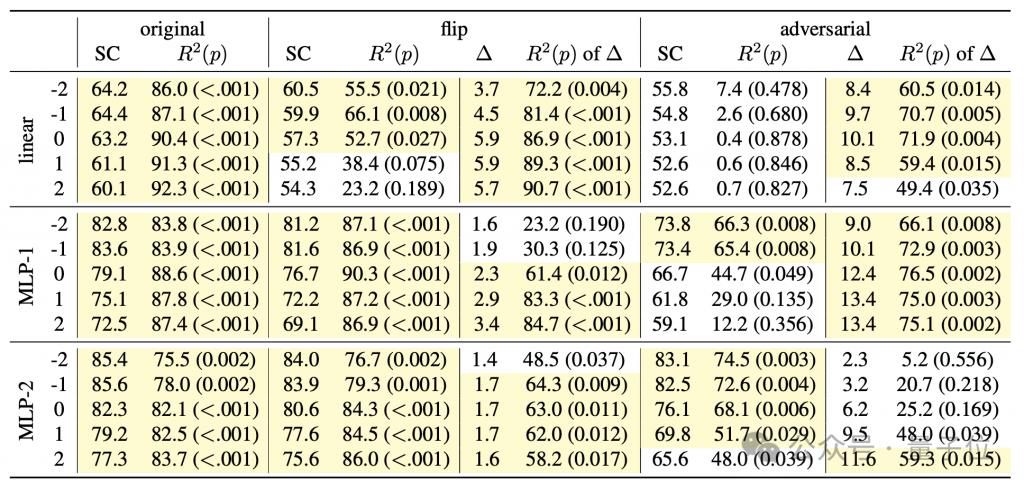
為了解決這個疑惑,作者補充了語意探測幹預實驗。
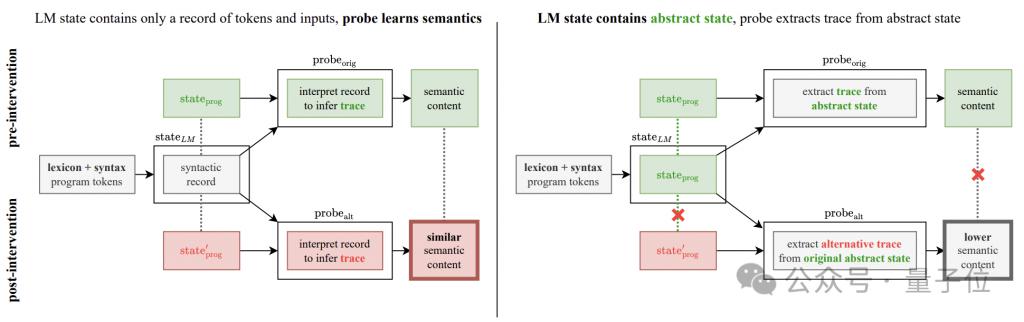
實驗的基本思路是改變程式操作的語意解釋規則,具體又分為 "flip" 和 "adversarial" 兩種方式。
"flip" 是強行反轉指令含義,如將"turnRight" 強行解釋為" 左轉" 不過能進行這種反轉的也只有"turnLeft" 和"turnRight";# #
"adversarial" 則是將所有指令對應的語意隨機打亂,具體方式如下方表格。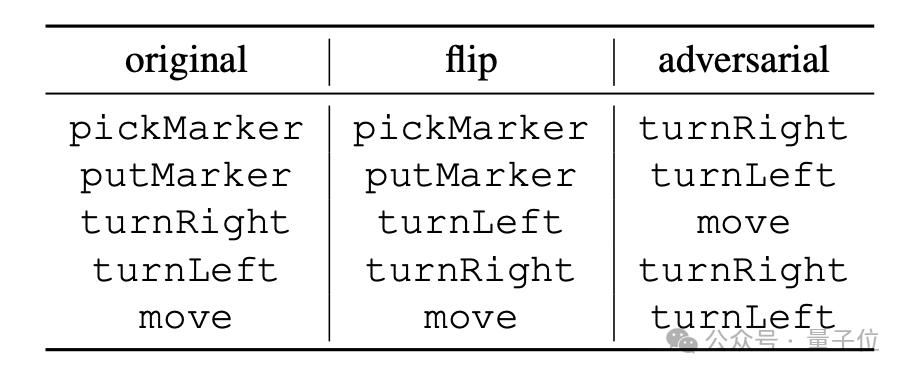
# # [ 1 ] https://news.mit.edu/2024/llms-develop-own-understanding-of-reality-as-language-abilities-improve-0814
[ 2 ] https://www.reddit.com/r/LocalLLaMA/comments/1esxkin/llms_develop_their_own_understanding_of_reality/
####
以上是大模型對語言有自己的理解! MIT 論文揭示大模型'思考過程”的詳細內容。更多資訊請關注PHP中文網其他相關文章!


































