


MPC控制演算法,全名為Model Predictive Control(模型預測控制),是一種基於系統動態模型的控制技術。它的工作原理是透過數學模型預測系統的未來行為,並基於這些預測結果來優化系統的控制輸入,從而實現期望的輸出。 MPC控制演算法的核心思想是在每個控制週期內,透過對未來一段時間內的預測結果進行最佳化,以獲得最佳的控制輸入。這種最佳化是基於一些預測結果來最佳化系統的控制輸入,從而實現期望的輸出。 MPC控制演算法的應用非常廣泛,特別適用於需要滿足一些限制條件的控制系統。透過結合系統模型和最佳化技術,MPC可以在不同的工業
MPC控制演算法的核心在於其預測模型,這個模型可根據系統的當前狀態資訊預測未來的系統狀態。預測模型的形式並不固定,可以是狀態空間方程式、傳遞函數、階躍響應模型、脈衝響應模型、模糊模型等,具體形式取決於被控對象和需要預測的狀態。
TinyMPC是專為凸模型預測控制量身定制的開源求解器,可提供高速運算。 TinyMPC在C++中實現,具有最小的依賴性,特別適用於資產受限平台上的嵌入式控制和機器人應用程式。 TinyMPC可以處理狀態和輸入邊界以及二階約束。 Python、Julia和MATLAB介面可用於協助產生嵌入式系統程式碼。
TinyMPC為強化隱私運算應用提供支持,可用於實現安全的多方運算和資源受限的處理平台之間的差距。將TinyMPC整合到運算能力不足的機器人中,使它們能夠快速執行操作並表現出安全執行的優勢。
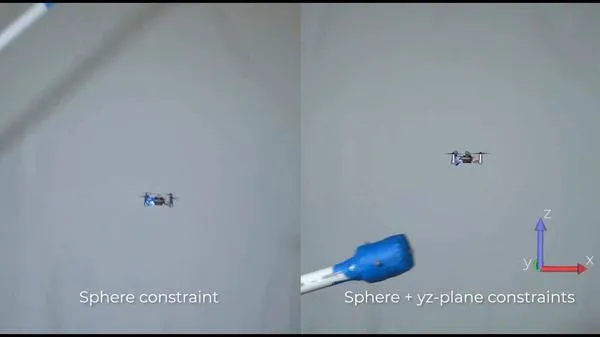
TinyMPC 的運行速度足夠快,可以在每個時間步長重新線性化約束,從而使其能夠對移動的障礙物進行推理。在左邊,在搖桿末端為中心的虛擬球體在每個時間步長被線性化為一組新的超平面約束。該演算法還可以處理任意數量的任意意義數量的任意線性約束。例如,在右側,它在停留在 yz 平面時避開了搖桿末端的搖桿的末端。
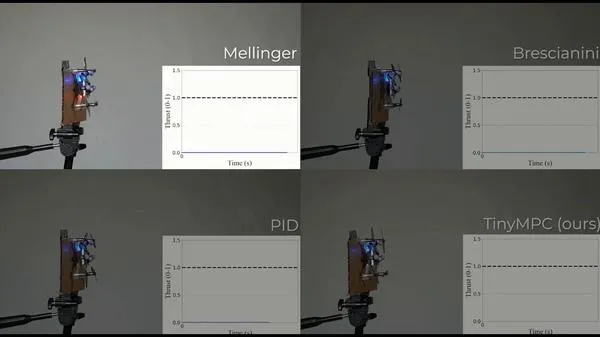
TinyMPC可以在極端條件下開始恢復。在這個範例中,它與Crazyflie 2.1的原始控制器進行了比較。只有TinyMPC才能夠突破控制極限,並實現乾淨俐落的恢復操作。
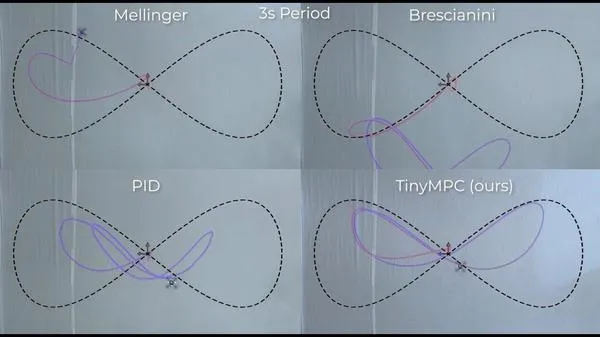
我們使用了相同的庫存控制器,以完成不可行的快速8 字形追蹤任務(只有在無人機更強大的情況下才能完成單一8 字形的時間)。 TinyMPC 和 PID 能夠保持豎立,但 TinyMPC 的軌跡更接近 8 字形。
在微控制器基準測試中,TinyMPC 在速度和記憶體佔用方面優於最先進的求解器。我們求解隨機產生的基於 QP 的 MPC 問題,並將迭代時間和記憶體佔用與 OSQP 進行比較。 TinyMPC 在 OSQP 上的最大加速是 OSQP 的 8 倍,記憶體少很多。

TinyMPC 現在也能夠處理圓錐約束!在(b)中,我們將TinyMPC與兩個現有的具有嵌入式支援的圓錐求解器(SCS和ECOS)對火箭軟著陸問題進行了基準測試。 TinyMPC 在 SCS 上實現了 13 倍的平均速度提升,在 ECOS 上實現了 137 倍的平均速度提升。

即時控制要求求解器在嚴格的時間視窗內傳回解決方案。在火箭軟著陸問題上比較了TinyMPC與SCS和ECOS的軌跡追蹤性能,同時人為地改變了每個求解的可用時間量。在所有控制持續時間內,TinyMPC 的違反約束更少,追蹤誤差也低於 SCS 和 ECOS。

演算法貢獻者:
Code acquisition address:
GitHub - TinyMPC/TinyMPC: Model-predictive control for microcontrollers
以上是比PID更絲滑的控制演算法&卡內基美隆大學的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















