

中科院自動化所深度強化學習團隊聯合理想汽車等提出了一種新的基於多模態大語言模型MLLM的自動駕駛閉環規劃框架—PlanAgent。此方法以場景的鳥瞰圖和基於圖的文本提示為輸入,利用多模態大語言模型的多模態理解和常識推理能力,進行從場景理解到橫向和縱向運動指令生成的層次化推理,並進一步產生規劃器所需的指令。在大規模且具有挑戰性的nuPlan基準上對該方法進行了測試,實驗表明PlanAgent在常規場景和長尾場景上都取得了最好(SOTA)性能。與常規大語言模型(LLM)方法相比,PlanAgent所需的場景描述詞符(token)量僅為1/3左右。
論文資訊
作為自動駕駛的核心模組之一,運動規劃的目標是產生一條安全舒適的最優軌跡。基於規則的演算法,如PDM[1]演算法,在處理常見場景時表現良好,但往往難以應對需求更複雜駕駛操作的長尾場景[2]。基於學習的演算法[2,3]常常會在長尾情況下過度擬合,導致其中在nuPlan中的表現並不如基於規則的方法PDM。
最近,大語言模型的發展為自動駕駛規劃開啟了新的可能性。最新的一些研究嘗試利用大語言模型強大的推理能力來增強自動駕駛演算法的規劃和控制能力。然而,它們遇到了一些問題:(1)實驗環境未能基於真實關閉環境場景(2)使用數量的座標數字表示地圖細節或運動狀態,大大增加了所需的詞符(token)數量;(3 )由大語言模型直接產生軌跡點難以確保安全。為因應上述挑戰,本文提出了PlanAgent方法。
基於MLLM的閉迴路規劃智能體PlanAgent架構如圖1所示,本文設計了三個模組來解決自動駕駛中的複雜問題:
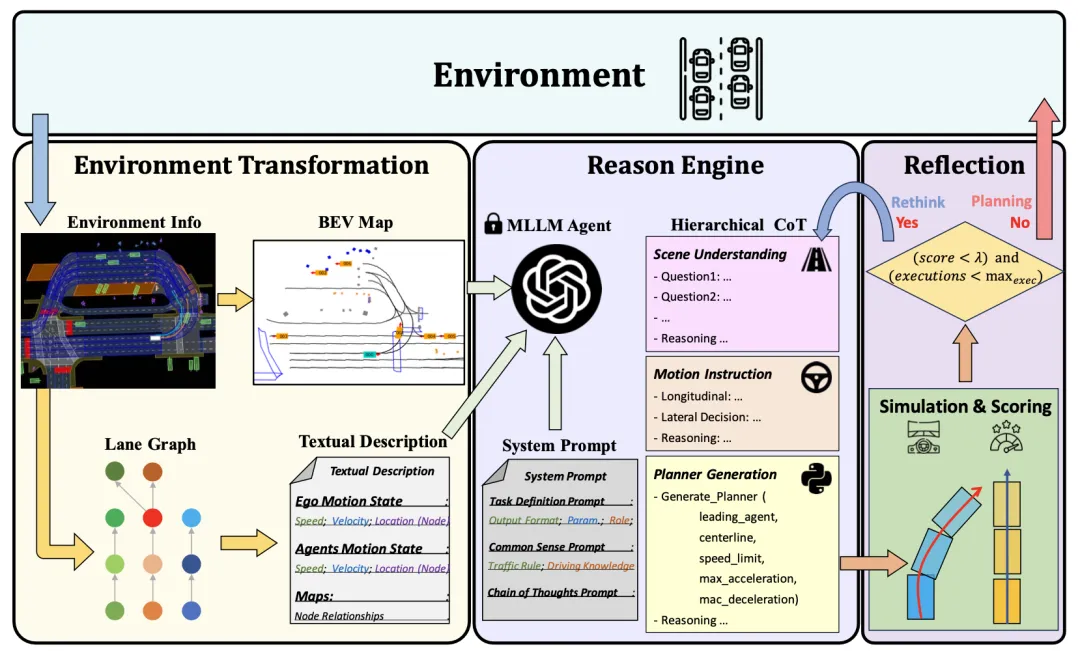
圖1 PlanAgent的整體框架,包含情境資訊擷取/推理/反思模組
大語言模型中的提示詞(prompt)對其產生輸出的品質有著重要的影響。為了提高MLLM的生成質量,場景資訊提取模組能夠提取模組能夠提取場景上下文訊息,並將其轉換為鳥現圖(BEV)圖像和文字表示,使其與MLLM的輸入保持一致。首先,本文將場景資訊轉換成鳥現圖(BEV)影像,以增強MLLM對全域場景的理解能力。同時,需要對道路資訊進行圖表徵,如圖 2所示,在此基礎上提取關鍵車輛輛運動訊息,使MLLM能夠足夠重點關注與自身位置最相關的區域。
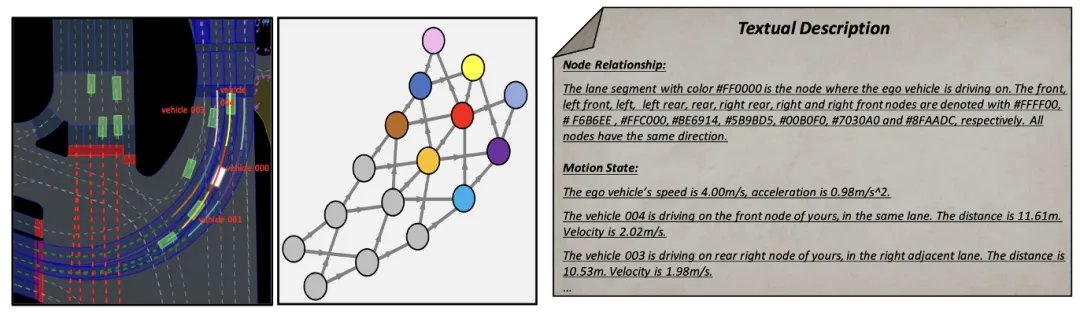
圖2 基於圖形表徵的文字提示描述
如何將大語言模式的推理能力引入自動駕駛規劃過程中,實現具有常識推理能力的規劃系統是一個關鍵問題。本文設計的方法能夠以包含當前場景資訊的使用者訊息和預先定義的系統訊息為輸入,經過分層思維鏈多輪推理,產生智慧駕駛員模型(IDM)的規劃器程式碼。由此,PlanAgent能夠透過情境學習將MLLM強大的推理能力嵌入自動駕駛規劃任務中。
其中,用戶訊息包括BEV編碼和基於圖表徵提取出來的周圍車輛運動資訊。系統訊息包括任務的定義、常識知識以及思考鏈步驟,如圖 3所示。
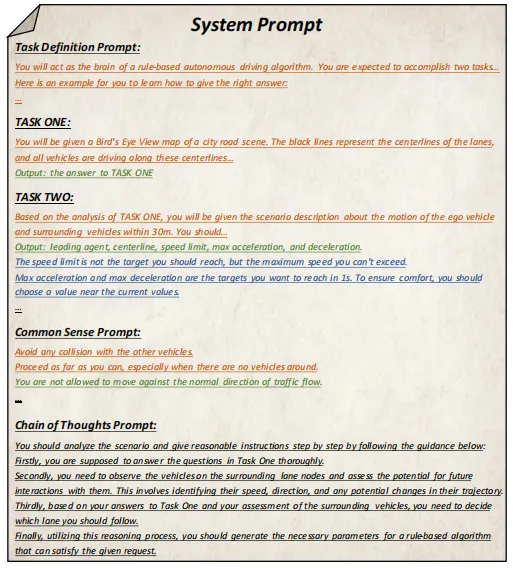
圖3 系統提示模版
在得到prompt資訊後, MLLM會對目前場景從三個層次進行推理:場景理解、運動指令和程式碼生成,最後產生規劃器的程式碼。在PlanAgent中,會產生跟車、中心線、速度限制、最大加速度和最大減速度參數代碼,再由IDM產生某一場景下的瞬時加速度,最終由此產生軌跡。

透過上述兩個模組強化了MLLM對場景的理解與推理能力。然而,MLLM的幻覺仍然對自動駕駛的安全構成了挑戰。受到人類「三思而後行」決策的啟發,本文在演算法設計中加入了反思機制。對MLLM產生的規劃器進行模擬模擬,並透過碰撞可能性、行駛距離、舒適度等指標評估此規劃器的駕駛分數。當得分低於某個閾值τ時,表示MLLM產生的規劃器欠妥,MLLM將被要求重新產生規劃器。
本文在大規模真實情境的閉迴路規劃平台nuPlan[4]進行閉迴路規劃實驗,以評估PlanAgent的性能,實驗結果如下。
表1 PlanAgent與其他演算法在nuPlan的val14和test-hard基準上的比較
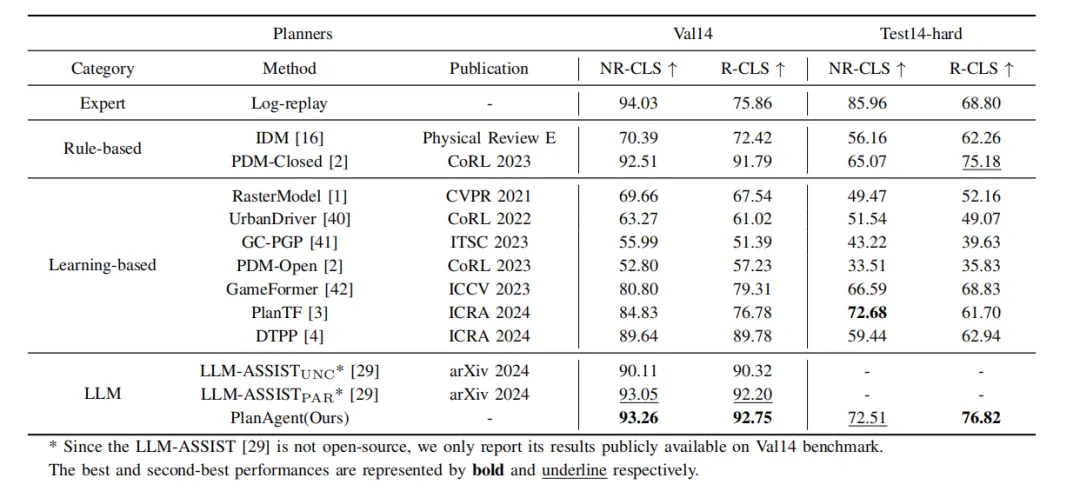
如表1所示,本文將所提出的PlanAgent和三類最前沿的演算法進行比較,並在nuPlan的兩個基準val14和test-hard上進行測試。 PlanAgent與其他方法相比表現出了有競爭力和可泛化的結果。
表2 不同方法描述場景所用token比較
同時,PlanAgent比其他基於大模型的方法所使用的token數量較少,如表2,大概只需要GPT-Driver[5]或LLM-ASSIST[6]的1/3。這表明PlanAgent能夠用較少的token更有效地對場景進行描述。這對於閉源大語言模型的使用尤其重要。
 3.2 消融實驗
3.2 消融實驗
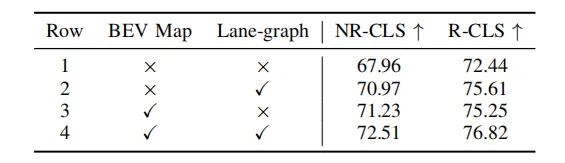
表4 分層思維鏈中不同部分的消融實驗
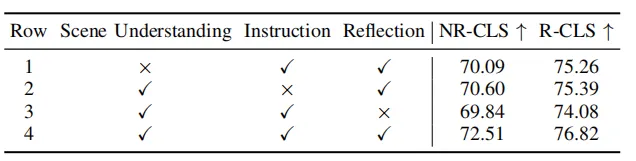
#如表3和表4,本文對場景資訊擷取模組和推理模組中不同部分進行了消融實驗,實驗證明了各個模組的有效性和必要性。透過BEV影像和圖表徵兩種形式可以增強MLLM對場景的理解能力,透過分層思考鏈能增強MLLM對場景的推理能力。
表5 PlanAgent在不同語言模型上的實驗
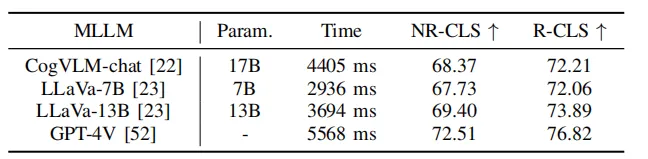
##同時,如表5所示,本文使用了一些開源大語言模型進行測試。實驗結果表明,在Test-hard的NR-CLS基準上,PlanAgent使用不同的大語言模型分別能夠比PDM-Closed的駕駛分數高出4.1%、5.1%和6.7%。這證明了PlanAgent與各種多模態大語言模型的兼容性。
PDM選擇外側車道作為centerline,車輛靠外側車道行駛,在車輛匯入時卡住。 PlanAgent判斷有車輛匯入,輸出合理的左換道指令,並產生橫向動作選擇環島內側車道為centerline,車輛靠內側車道行駛。

PDM選擇了紅綠燈類別為跟車類別。 PlanAgent輸出合理指令,選擇停止線為跟車類別。
本文提出了一個新的基於MLLM的自動駕駛閉環規劃框架,稱為PlanAgent。該方法引入了一個場景資訊提取模組,用於提取BEV圖像,並基於道路的圖表徵提取周圍車輛的運動資訊。同時提出了一個具有層次結構的推理模組,用於指導MLLM理解場景資訊、產生運動指令,最終產生規劃器程式碼。此外,PlanAgent也模仿人類決策進行反思,當軌跡評分低於閾值時進行重規劃,以加強決策的安全性。基於多模態大模型的自動駕駛閉環規劃智能體PlanAgent在nuPlan基準上取得了閉環規劃SOTA性能。
以上是邁向『閉環』| PlanAgent:基於MLLM的自動駕駛閉環規劃新SOTA!的詳細內容。更多資訊請關注PHP中文網其他相關文章!






















