

原标题:DenserRadar: A 4D millimeter-wave radar point cloud detector based on dense LiDAR point clouds
论文链接:https://arxiv.org/pdf/2405.05131
作者单位:清华大学

4D毫米波 (mmWave) 雷达以其在极端环境下的鲁棒性、广阔的探测范围以及测量速度和高度的能力,已经显示出在自动驾驶系统面临边缘情况 (corner-case) 时增强感知能力的显著潜力。然而,4D 毫米波雷达点云的固有稀疏性和噪声限制了它的进一步发展和实际应用。本文介绍了一种新型的4D 毫米波雷达点云检测器,它利用高分辨率的密集雷达点云。本文的方法从拼接的LiDAR点云构建密集的3D占据空间真值,并采用一个特别设计的网络,名为DenserRadar。所提出的方法在点云密度和准确性方面超越了现有的基于概率和基于学习的毫米波雷达点云检测器,在K-Radar数据集上取得了更好的效果。
本文的工作是第一个由密集3D占据数据空间真值监督的4D 毫米波雷达点云检测器,该真值通过拼接多帧LiDAR点云生成的,从而增密了检测到的毫米波雷达点云。
本文提出了一种创新的密雪3D占据数据空间真值生成流程,以及K-Radar数据集的拼接密集LiDAR点云,这些点云提供了全面的场景真值,在发表后将可供进一步研究使用。
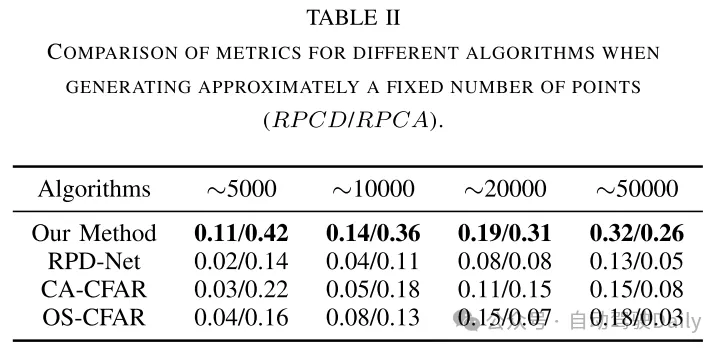
由于DenserRadar网络的专门设计,本文的算法在点云的密度和准确性方面均优于现有的CFAR类型和基于学习的毫米波雷达点云检测方法。
自动驾驶技术旨在提供安全、便捷且舒适的交通体验,其发展速度令人印象深刻。要实现高级别自动驾驶,复杂环境感知和定位的能力是不可或缺的。因此,自动驾驶车辆上装备备感器,包括相机、激光雷达(LiDAR)和毫米波雷达,以及与之相关的算法,正吸引越来越多的研究兴趣。
鉴于其体积紧凑、成本效益高、全天候适应性、测速能力和广阔的检测范围等优势[1],毫米波(mmWave)雷达已被广泛应用于自动驾驶领域。最近在多输入多输出(MIMO)天线技术方面的进步一步提高了其高度分辨率,促成了4D毫米波雷达的出现。因此,4D毫米波雷达越来越被视为自动驾驶中感知和定位能力的关键增强,特别是在雨天、雪天、雾天等具有挑战性的边缘场景中。正如其名,4D毫米波雷达能够够测量目标信息的四个维度:距离、方位、高度和多普勒速度,提供了一个全面的感测解决方案。
然而,4D毫米波雷达点云的质量显著落后于激光雷达点云。首先,4D毫米波雷达点云在分辨率上,尤其是在角度测量上,存在低分辨率的问题。这一限制主要是因为毫米波雷达的天线配置和到达方向(DOA)估计[2]。其次,4D毫米波雷达点云比激光雷达点云要稀疏得多。第三,由于多路径效应、信号干扰和地面反射,4D毫米波雷达点云常常包含大量的杂波点。所有这些缺点阻碍了4D毫米波雷达在自动驾驶中的应用。
4D毫米波雷达点云的质量不仅受到硬件的限制,还受到信号处理算法的限制[3]。特别是,从原始雷达图或张量中检测实际目标以生成点云可能会极大地影响质量。传统上,False Alarm Rate(CFAR)检测器及其变种[4]、[5]被广泛应用于毫米波雷达点云的检测。然而,作为基于概率的算法,CFAR型检测器在检测大小不一的物体时可能会遇到问题,因为这些物体不是独立同分布的[6],这在自动驾驶场景中经常出现。
为了解决与4D毫米波雷达相关的点云质量问题,本文提出了一种基于学习的4D毫米波雷达点云检测器,该检测器由来自激光雷达点云生成的密集真实信息监督。最初,本文拼接多帧预处理过的激光雷达点云,以生成密集的3D占用率真值。然后本文介绍了DenserRadar网络,该网络提取原始4D毫米波雷达张量的特征,生成密度更高、精度更高的4D毫米波雷达点云。该网络采用了加权混合损失函数以及其他新颖设计元素,以捕获多分辨率特征并生成分辨率优于传统技术的点云。在K-Radar数据集[7]上进行的对比实验证明了本文方法的有效性。
本文的算法如图 1 所示。首先,本文设计了一个真值生成流程,通过拼接多帧激光雷达点云数据来获得密集的3D占用空间真值作为监督信息,然后建立了DenserRadar网络,该网络的任务是从原始的4D毫米波雷达张量数据中检测毫米波雷达点云。

图 1. 整个算法的概览。

图 2. 真值生成流程图。

图 4. 本文的DenserRadar算法与CA-CFAR算法的定性点云比较,附有图片和密集的3D占用空间真值点云作为参考。图中的每个箭头代表10米的长度。


本文介绍了DenserRadar,这是一个新颖的4D毫米波雷达点云检测网络,以及一个用于生成密集真值的创新流程。实验结果和消融研究证明了本文的网络架构和真值生成方法论的有效性。这项研究有潜力提升自动驾驶系统的感知和定位能力,特别是在具有挑战性的边缘情况场景中。
以上是DenserRadar:基於密集LiDAR點雲的4D毫米波雷達點雲偵測器的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















