

目前,難以在偵測效率和偵測結果之間取得適當的平衡。我們研究了一種用於高解析度光學遙感影像中目標偵測的增強YOLOv5演算法,利用多層特徵金字塔、多重偵測頭策略和混合注意力模組來提高光學遙感影像的目標偵測網路的效果。根據SIMD資料集,新演算法的mAP比YOLOv5好2.2%,比YOLOX好8.48%,在偵測結果和速度之間達到了更好的平衡。
隨著遠感技術的快速發展,高解析度光學遠感影像已被用於描述地球表面的許多物體,包括飛機、汽車、建築物等。目標偵測在遠感影像的解釋中起著至關重要的作用,可用於遠感影像的分割、描述和目標追蹤。然而,由於其相對較大的視野和高海拔的必要性,航空光學遠感影像表現出尺度、視點特異性、隨機定向和高背景複雜性的多樣性,而大多數傳統資料集包含地面視圖。因此,用於建構人工特徵檢測技術傳統上在精度和速度方面具有較大差異的記錄。由於社會的需求和深度學習發展的支持,在光學遠感影像中使用神經網路進行目標檢測是必要的。
目前結合深度學習分析光學遠感照片的目標偵測演算法可分為有監督、無監督和弱監督三種。然而,由於無監督和弱監督演算法的複雜性和不確定性,監督演算法是最常用的演算法。此外,監督目標偵測演算法可分為單階段或兩階段。基於飛機通常位於機場,船舶通常位於港口和海洋的假設,在下採樣星圖像中檢測機場和港口,然後將發現的目標映射回原始的超高分辨率衛星圖像,可以同時檢測不同大小的物體。有研究者提出了一種基於RCNN的旋轉目標偵測方法,透過解決目標方向的隨機化問題,提高遙感影像中目標偵測的準確性。
目前的大多數YOLO系列偵測頭都是基於FPN和PAFPN的輸出特性,其中基於FPN的網絡,如YOLOv3,及其變體如下圖a所示,它們直接利用單向融合特性進行輸出。而基於PAFPN演算法的YOLOv4和YOLOv5在此基礎上增加了一個低電平到高電平的通道,它直接向上傳輸低階訊號(下圖b)。
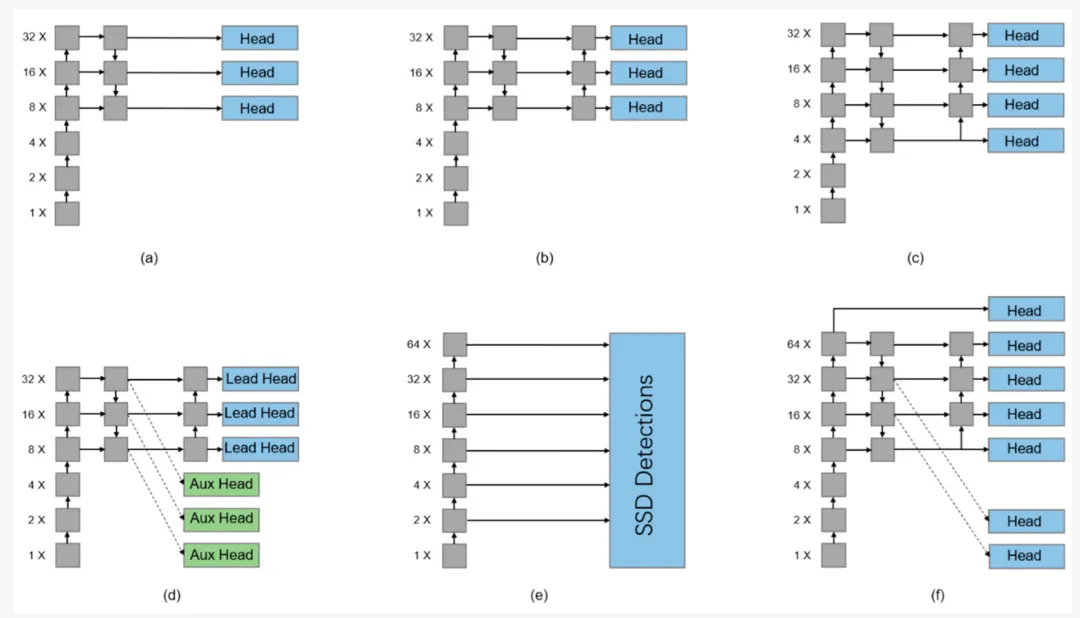
如上圖所示,在一些研究中,TPH-YOLOv5模型中的特定偵測任務新增了一個偵測頭。在上圖b和c中,只有PAFPN功能可以用於輸出,而FPN功能未充分利用。因此,YOLOv7將三個輔助磁頭連接到FPN輸出,如上圖d所示,儘管輔助磁頭僅用於“粗糧選擇”,並且重量評估較低。 SSD的檢測頭是為了改善YOLO網路對錨集過於粗糙的設計而提出的,並提出了基於多尺度的密集錨設計組成。如圖f所示,此策略可以同時利用PANet和FPN的特徵資訊。此外,還有64倍下採樣處理直接加入了輸出,這使得網路包含先前的全域資訊。
多重偵測頭方法可以有效地利用網路的輸出特性。改進的YOLO是一個用於高解析度遙感照片的目標偵測網路。如下圖所示:

主幹網的基本架構是以C3和卷積模組為核心的CSP密集網路。在資料增強之後,影像被饋送到網路中,並且在核大小為6的Conv模組進行通道混合之後,許多卷積模組進行特徵檢索。在名為SPPF的特徵增強模組之後,它們連接到Neck的PANet。為了提高網路的偵測能力,進行了雙向特徵融合。 Conv2d用於獨立擴展融合的特徵層,以產生多層輸出。如下圖所示,NMS演算法將所有單層偵測器的輸出組合在一起,產生最終的偵測幀。

下圖b描述了改進的YOLO網路每個模組的結構組成。

Conv包括2D卷積層、BN層批量歸一化和Silu激活函數,C3包括兩個2D卷積層和一個瓶頸層,Upsample是上採樣層。 SPPF模組是SPP模組的加速版本,MAB模組如上面提及的所示,其中ECA如左下角所示。在沒有降維的通道層級全域平均池化之後,考慮到每個通道與其k個鄰居的關係,使用大小為k的快速1D卷積來捕獲局部跨通道交互信息,從而有效地執行ECA。上述兩個變換沿著兩個空間方向收集特徵,以產生一對方向感知特徵圖,然後將其連接起來,並使用卷積和Sigmoid函數進行修改,以提供注意力輸出。
SIMD資料集是一個多類別、開源、高解析度遙感物件偵測資料集,共包含15個類別,如圖4所示。此外,SIMD資料集更分佈在中小型目標(w


可以將SPPF模組的輸出連接到輸出頭,從而識別影像中的大目標。然而,SPPF模組的輸出具有多個連接,並涉及多個尺度的目標,因此直接將其用於探測頭來識別大型物體將導致較差的模型表示,如上圖所示,顯示了添加MAB模組前後一些檢測結果熱圖的視覺比較。在加入MAB模組後,該檢測頭專注於檢測大目標,而將小目標的預測分配給其他預測頭,提高了模型的表達效果,也更符合YOLO演算法中基於目標大小劃分檢測頭的要求。

有些偵測結果如上圖所示。從各個檢測結果來看,與其他演算法沒有太大差異,但與其他演算法相比,我們研究的演算法在保證時間消耗不顯著增加的同時,提高了模型的檢測效果,並利用注意力機制增強了模型的表達效果。

以上是改進的檢測演算法:用於高解析度光學遙感影像目標檢測的詳細內容。更多資訊請關注PHP中文網其他相關文章!





















