


Vision Pro mempunyai satu lagi permainan baharu yang hangat, kali ini ia dikaitkan dengan kecerdasan yang terkandung~
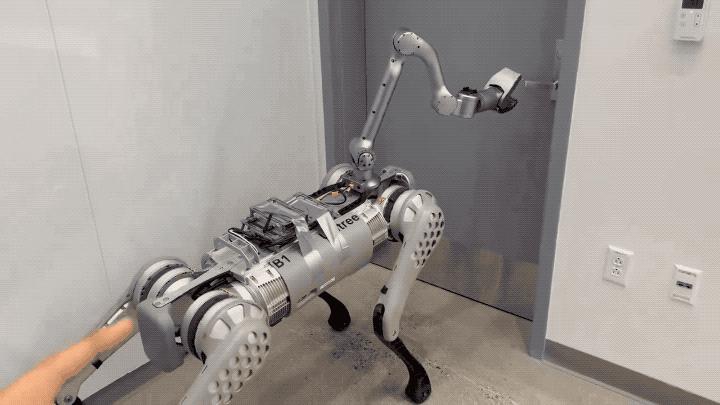
Sama seperti ini, lelaki MIT menggunakan fungsi penjejakan tangan Vision Pro untuk berjaya mencapai kawalan masa nyata anjing robot itu.

Bukan sahaja tindakan seperti membuka pintu boleh menjadi tepat, malah hampir tiada kelewatan.
Sebaik Demo keluar, bukan sahaja netizen memuji Goose Girl, malah pelbagai penyelidik perisikan yang dijelmakan turut teruja.
Sebagai contoh, bakal pelajar kedoktoran di Universiti Tsinghua ini: 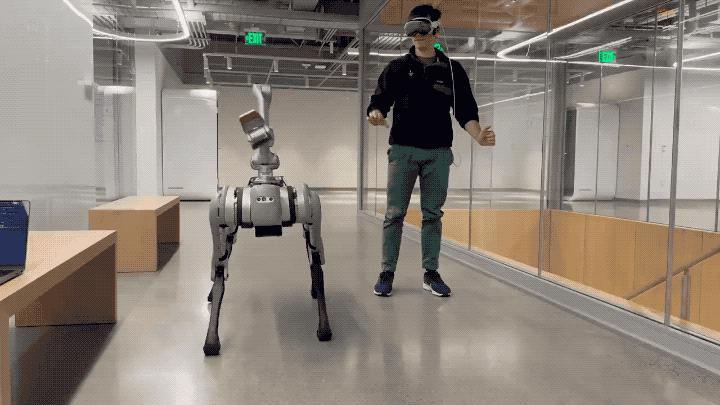
Sesetengah orang dengan berani meramalkan: Beginilah cara kita akan berinteraksi dengan generasi mesin akan datang.
 Mari kita lihat lebih dekat pada Apl yang dibangunkan oleh pengarang - Pengukus Penjejakan.
Mari kita lihat lebih dekat pada Apl yang dibangunkan oleh pengarang - Pengukus Penjejakan.
Seperti namanya, aplikasi ini direka bentuk untuk menggunakan Vision Pro untuk mengesan pergerakan manusia dan menghantar data pergerakan ini ke peranti robotik lain di bawah WiFi yang sama dalam masa nyata. 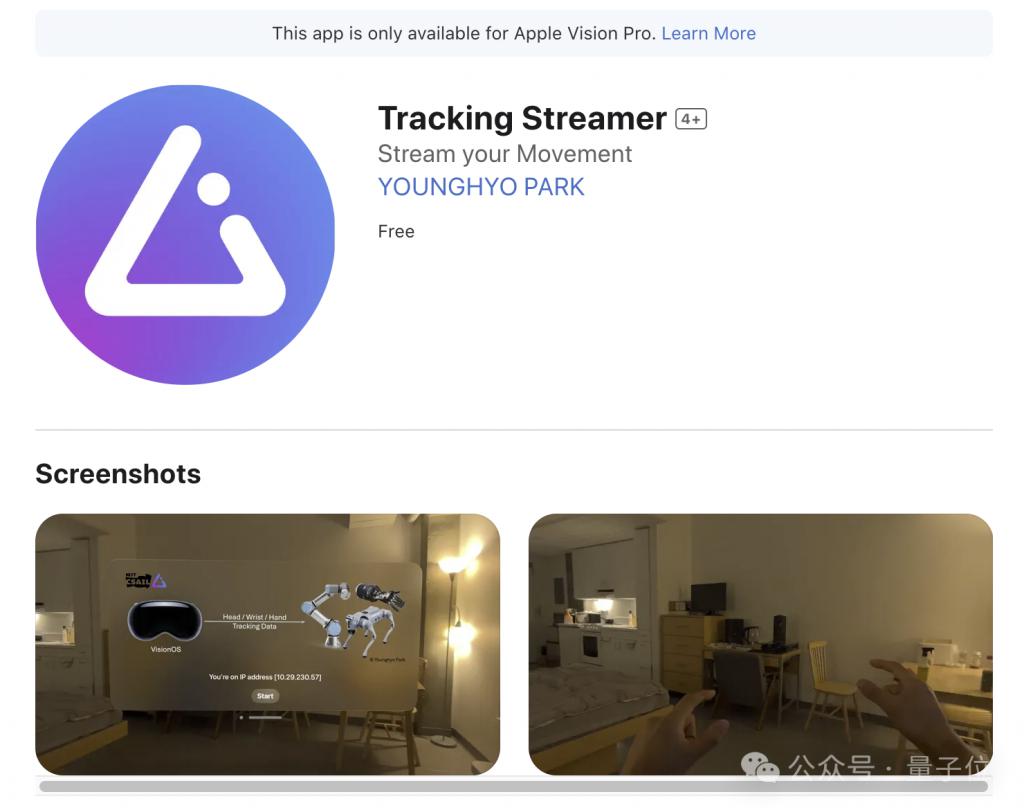
Bahagian penjejakan gerakan bergantung terutamanya pada perpustakaan ARKit Apple.
Penjejakan kepala memanggil queryDeviceAnchor. Pengguna boleh menetapkan semula bingkai kepala kepada kedudukan semasa dengan menekan dan menahan Digital Crown. 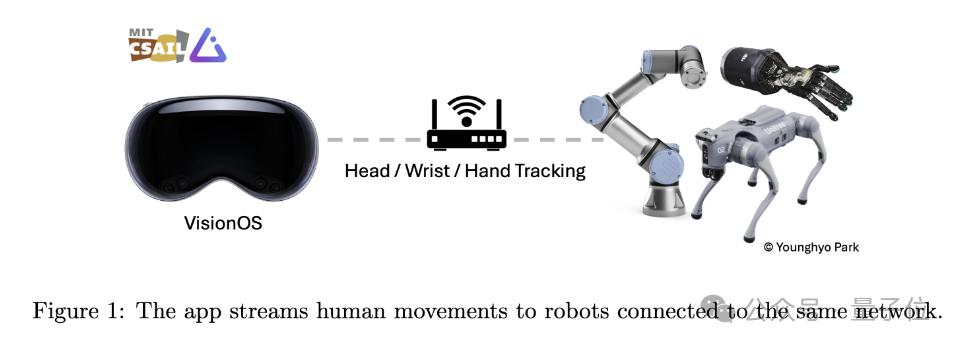
Dari segi komunikasi rangkaian, Aplikasi ini menggunakan gRPC sebagai protokol komunikasi rangkaian untuk menstrim data. Ini membolehkan data melanggan lebih banyak peranti, termasuk peranti Linux, Mac dan Windows.
Selain itu, bagi memudahkan penghantaran data, penulis juga telah menyediakan Python API yang membolehkan pembangun melanggan dan menerima data penjejakan yang distrim daripada Vision Pro secara pemrograman. 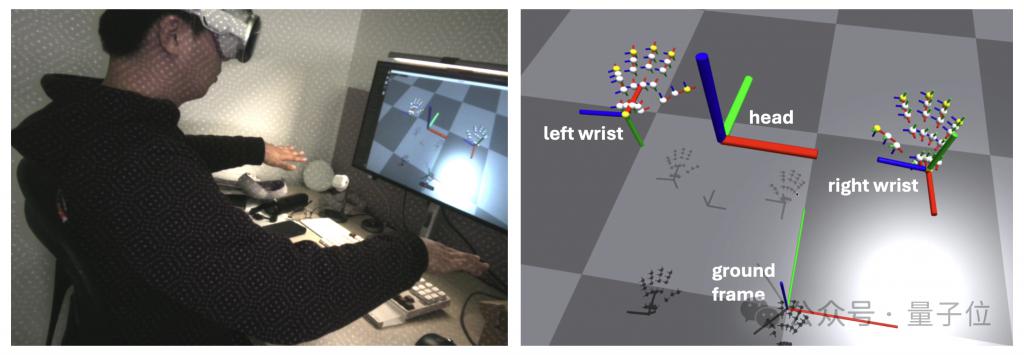
Seperti yang ditunjukkan oleh ramai profesional, tidak kira sama ada pergerakan anjing robot itu masih dikawal oleh manusia, sebenarnya, berbanding "kawalan" itu sendiri, digabungkan dengan algoritma pembelajaran tiruan, manusia lebih berkebolehan dalam proses ini seperti jurulatih robot.
Vision Pro menyediakan kaedah interaksi yang intuitif dan mudah dengan menjejaki pergerakan pengguna, membolehkan bukan profesional menyediakan data latihan yang tepat untuk robot. 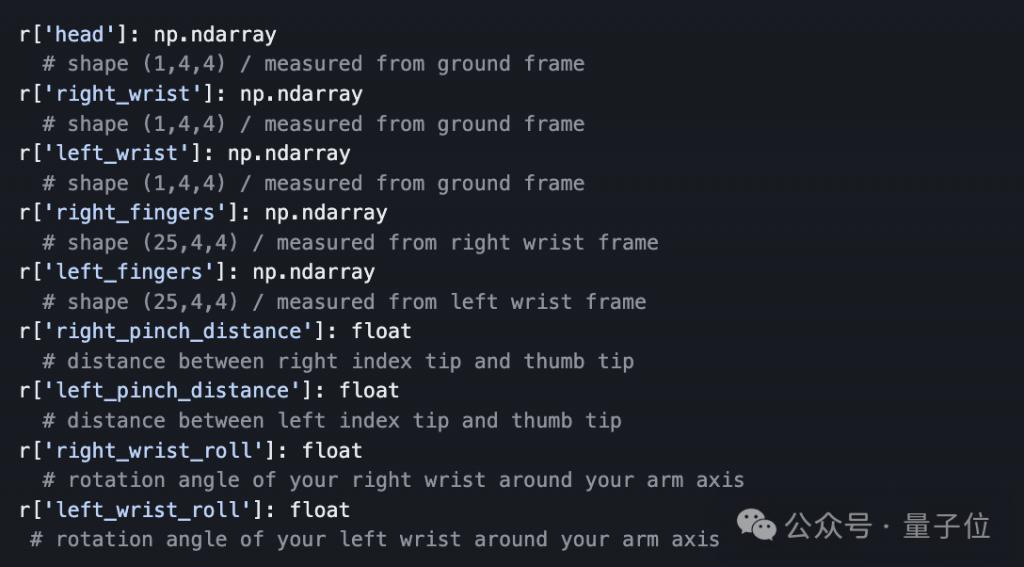
Atas ialah kandungan terperinci Latih anjing robot anda dalam masa nyata dengan Vision Pro! Projek sumber terbuka pelajar PhD MIT adalah popular. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!















![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



