


Sistem parkir automatik bermakna kenderaan boleh mencari tempat letak kereta secara bebas dan melengkapkan tempat letak kereta yang tepat tanpa campur tangan manual. Ia juga boleh bergerak ke lokasi yang ditetapkan mengikut keperluan pengguna. Kematangan teknologi ini akan banyak mengurangkan kesulitan orang ramai semasa proses parkir, seperti membuang masa mencari tempat letak kereta untuk jangka masa yang lama, serta isu keselamatan seperti perlanggaran kenderaan dan geseran yang mungkin berlaku semasa mencari tempat letak kereta.
Pada masa ini, banyak syarikat teknologi dan makmal universiti sedang menerokai bidang parkir autonomi. Syarikat seperti Mercedes-Benz dan Bosch telah mewujudkan infrastruktur tempat letak kereta NVIDIA sedang membangunkan algoritma pemanduan automatik dan kaedah pengesanan ruang letak kereta untuk tempat letak kereta BMW juga telah memasang modul parkir automatik pada kenderaan pengeluaran.
Memandangkan permintaan meluas untuk teknologi tempat letak kereta automatik dalam industri, kami menjalankan tinjauan sistematik mengenai status pembangunan sistem tempat letak kereta automatik. TermasukTrend standard industrisistem parkir automatik,Penunjuk penilaian prestasi,Teknologi yang direka bentuk ke dalam setiap sub-modul sistem parkir automatik, dsb.
Memandangkan sistem tempat letak kereta automatik semasa telah mendapat perhatian meluas daripada industri dan akademia, pelbagai negara dan syarikat sentiasa membangunkan teknologi parkir automatik. Oleh itu, adalah penting untuk merumuskan piawaian untuk teknologi tempat letak kereta automatik. Piawaian teknikal yang telah dirumuskan termasukMaklumat Geografi,Kedudukan Luar,Kedudukan Ruang Dalaman,Piawaian Tempat Letak KeretadanPiawaian Komunikasi Kenderaandiringkaskan dalam jadual di bawah.
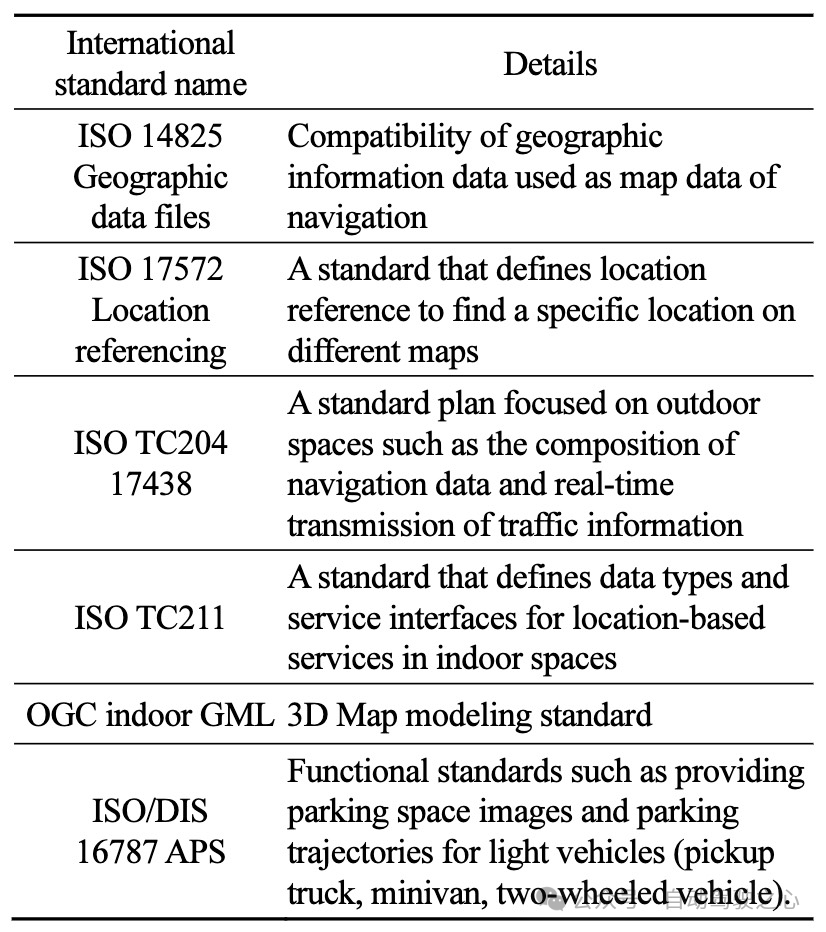
Standard yang berkaitan dalam industri tempat letak kereta automatik
Penilaian semasa sistem parkir automatik merangkumi dua bahagian, iaitupenilaian bahagian pemanduan automatikdanpenilaian bahagian parkir automatik.
Penilaian teknologi pemanduan autonomi mengikut piawaian "Peringkat Teknologi Pemanduan Autonomi" yang dirumus oleh Persatuan Kejuruteraan Automotif Piawaian ini membahagikan teknologi pemanduan autonomi kepada enam tahap, berdasarkan tahap teknikal dan kawalan subjek dan keupayaan memandu. Untuk memudahkan penilaian setiap peringkat, piawaian ISO/WD 34501 dan ISO/WD 34502 yang sedang dibangunkan telah dicadangkan. Piawaian ISO/WD 34501 digunakan pada terma dan takrifan untuk senario ujian dalam sistem Tahap 3, manakala standard ISO/WD 34502 menyediakan panduan tentang senario ujian dan proses penilaian keselamatan. Penggubalan piawaian ini bertujuan untuk menyediakan kriteria penilaian bersatu untuk pembangunan dan aplikasi teknologi pemanduan autonomi dan menggalakkan pembangunan teknologi pemanduan autonomi.
Walaupun teknologi parkir automatik kini menarik perhatian ramai, pembangunan piawaian antarabangsa masih di peringkat awal. Tidak seperti piawaian penilaian pemanduan autonomi, tahap teknikal tempat letak kereta autonomi diukur terutamanya oleh piawaian penilaian pembangun.
Jadual berikut menunjukkan contoh senario tempat letak kereta autonomi dalam sistem senario situasi trafik dibahagikan mengikut tahap prestasi.
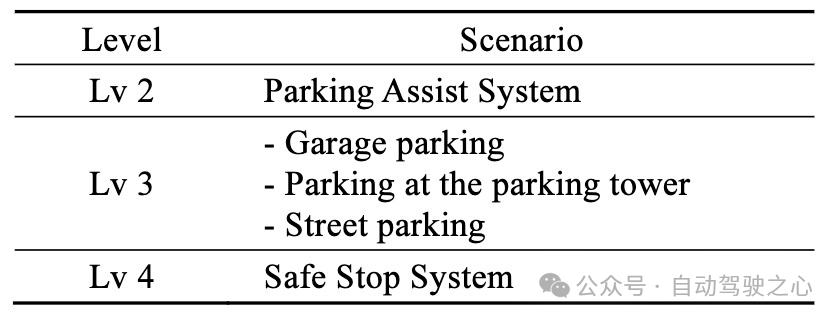
Pembahagian peringkat tempat letak kereta automatik
Penilaian sistem senario situasi trafik merangkumi dua bahagian senario: pemanduan dan tempat letak kenderaan autonomi, dan menggunakan "peringkat teknologi pemanduan autonomi" yang ditakrifkan oleh Persatuan Kejuruteraan Automotif untuk menunjukkan keupayaan tempat letak kenderaan berautonomi. Pada masa ini terdapat tiga peringkat dalam sistem.
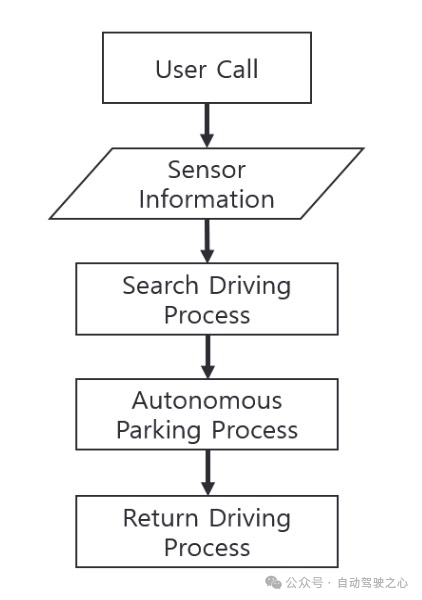
Aliran kerja sistem parkir automatik
Matlamat utama proses pemanduan carian ialah kereta boleh mencari tempat letak kereta secara autonomi di tempat letak kereta, jadi proses ini memerlukan penggunaanKedudukan,Pengelak perlanggarandanTeknologi pengesanan ruang letak kereta.
Pengenalan kepada teknologi penentududukan
Dalam sistem parkir automatik, GPS atau sensor IMU kenderaan sendiri boleh digunakan untuk mengesahkan kelajuan dan sikap kenderaan serta membetulkan ralat anggaran kedudukan kenderaan. Walau bagaimanapun, dalam beberapa adegan dalaman, isyarat GPS tidak boleh diterima. Oleh itu, kenderaan pandu sendiri perlu dilengkapi dengan kamera, lidar dan radar gelombang milimeter untuk mendapatkan bantuan. Gambar di bawah adalah pengenalan kepada beberapa maklumat sensor yang dilengkapi pada kenderaan.
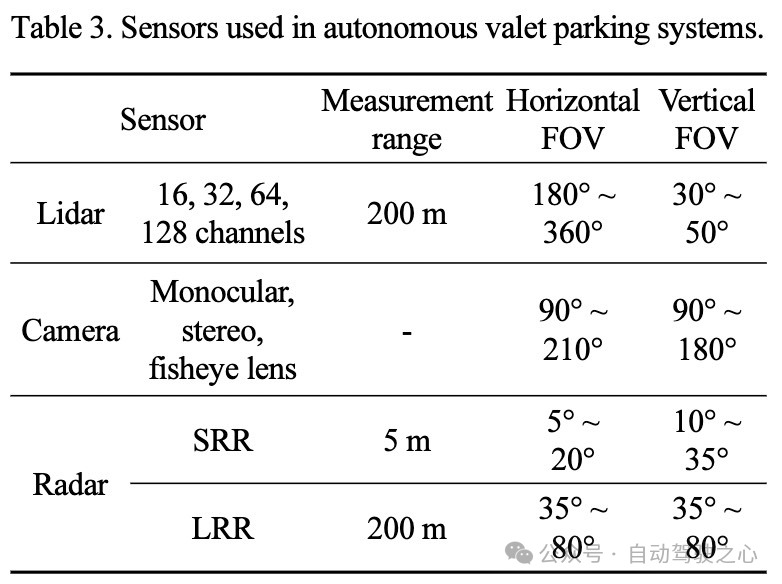
Pengenalan kepada maklumat penderia yang dilengkapi dengan kenderaan parkir automatik
Selepas mendapatkan maklumat yang dikumpul oleh penderia berbeza ini, teknologi pemetaan SLAM boleh digunakan untuk membina semula persekitaran di sekeliling kenderaan autonomi untuk mencapai kedudukan kenderaan. Teknologi pemetaan SLAM boleh dibahagikan kepada dua kategori berikut: kaedah pemetaan langsung: mengesan keamatan data yang berubah apabila penderia bergerak untuk menganggarkan sikap penderia. Walau bagaimanapun, kerana kaedah jenis ini mudah dipengaruhi oleh perubahan pencahayaan dan tidak dapat mencapai penempatan semula, kaedah pemetaan semasa jarang berdasarkan kaedah jenis ini.
Oleh kerana senario aplikasi utama sistem parkir automatik adalah di tempat letak kereta, dan akan terdapat banyak kenderaan yang diletakkan di tempat letak kereta, teknologi anti-perlanggaran adalah sangat penting . Dalam teknologi anti-perlanggaran,penderia ultrasonik
,penderia radar gelombang pendek,penderia Lidardanpenderia kameradigunakan terutamanya. Penderia akustik dan radar digunakan terutamanya untuk mencapai julat yang tepat. Penderia kamera terutamanya menggunakan perbezaan kedudukan objek yang sama dalam imej berturut-turut untuk menganggarkan jarak secara mendalam.
Teknologi pengesanan ruang letak keretaPengesanan ruang letak kereta dilakukan secara berterusan semasa proses pencarian dan pemanduan, dan biasanya termasuk penglihatan komputer tradisional, pembelajaran mendalam dan pelaksanaan hibrid kedua-dua kaedah.
Penglihatan komputer tradisional terutamanya menentukan dan mengenal pasti bentuk tempat letak kereta, seperti pengesanan garisan ruang letak kereta dan pengesanan titik ciri, seperti yang ditunjukkan dalam rajah di bawah.Contoh bentuk ruang letak kereta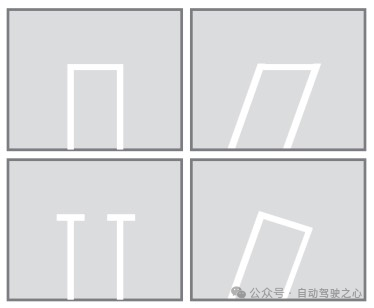
Proses pengesanan ruang letak kereta berdasarkan rangkaian neural convolutional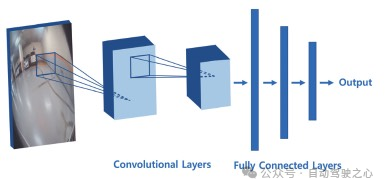
Proses parkir automatik
Pendekatan berasaskan algoritma melibatkan pengiraan lokasi dan bentuk laluan ke tempat letak kereta dan lokasi semasa kenderaan. Untuk mengira laluan letak kereta yang sesuai, algoritma melibatkan algoritma seperti masalah kawalan optimum, kaedah perancangan laluan berasaskan grid, dan penerokaan pantas pokok rawak.
Kaedah berasaskan pembelajaran pengukuhan boleh menjana laluan optimum untuk proses parkir autonomi dalam simulator tempat letak kereta autonomi. Dalam simulator letak kereta autonomi, kenderaan mempelajari prosedur tempat letak kereta biasa. Kaedah pembelajaran ini secara berterusan memperoleh laluan optimum dengan ketepatan parkir tertinggi dengan mengulangi proses penjanaan dan penilaian laluan, seperti yang ditunjukkan dalam rajah di bawah.
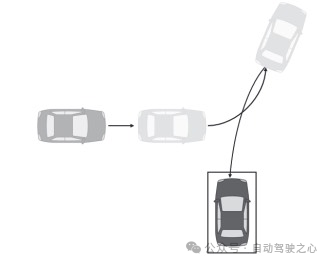
Proses parkir terbalik parking automatik
Kembali ke proses pemanduan bermaksud apabila kenderaan pandu sendiri memasuki tempat letak kereta dan menunggu, pengguna boleh memanggil kenderaan untuk bergerak. Pergi ke tempat yang ditentukan oleh pengguna. Dalam proses ini, kita perlu menggunakan teknologi penjejakan laluan.
Pada masa ini, teknologi penjejakan laluan termasuk kaedah menjejak laluan perjalanan dan kaedah menjejak laluan yang diubah suai. Walau bagaimanapun, kedua-dua kaedah menggunakan algoritma kawalan kenderaan yang serupa Untuk butiran, sila rujuk kertas [1-2]. Idea umum adalah untuk melaksanakan arahan kawalan untuk menggerakkan kenderaan di sepanjang laluan yang dijana dengan mengambil kira kedudukan semasa kenderaan dan keadaan sudut stereng.
Disebabkan peningkatan permintaan untuk teknologi parkir automatik, pelbagai negara dan pengilang sedang giat membangunkan sistem parkir automatik. Dengan mengambil kira perkembangan pesat teknologi tempat letak kereta automatik, dalam artikel ini, kami meringkaskan trend penyeragaman, piawaian penilaian dan pelbagai komponen sistem tempat letak kereta automatik dalam sistem tempat letak kereta automatik dan memperkenalkannya secara terperinci Kami berharap ia dapat membantu semua orang

Pautan asal: https://mp.weixin.qq.com/s/UPwW0E8LTX5V79GK12HF_Q
Atas ialah kandungan terperinci Penyelidikan umum ke dalam tempat letak kenderaan autonomi, menyepadukan piawaian industri, penilaian trend dan pengenalan sistem. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
 Perisian penilaian pelayan
Perisian penilaian pelayan Cara menggunakan html untuk navigasi web
Cara menggunakan html untuk navigasi web Pengenalan jenis fail
Pengenalan jenis fail Bagaimana untuk memasang pemacu pencetak dalam linux
Bagaimana untuk memasang pemacu pencetak dalam linux Apakah yang perlu saya lakukan jika huruf Inggeris muncul apabila komputer dihidupkan dan komputer tidak boleh dihidupkan?
Apakah yang perlu saya lakukan jika huruf Inggeris muncul apabila komputer dihidupkan dan komputer tidak boleh dihidupkan? Perbezaan antara fail pengepala dan fail sumber
Perbezaan antara fail pengepala dan fail sumber Apakah sebenarnya syiling fil?
Apakah sebenarnya syiling fil? Cara menggunakan fungsi nanosleep
Cara menggunakan fungsi nanosleep




















![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



