


Tajuk asal: DrivingGaussian: Composite Gaussian point rendering untuk adegan pemanduan autonomi dinamik ambien
Sila klik di sini untuk melihat kertas: https://arxiv.org/pdf/2312.07920.pdf
Pautan kod: https://pkuv. github.io/DrivingGaussian/
Gabungan pengarang: Universiti Peking Universiti Penyelidikan Google California, Merced
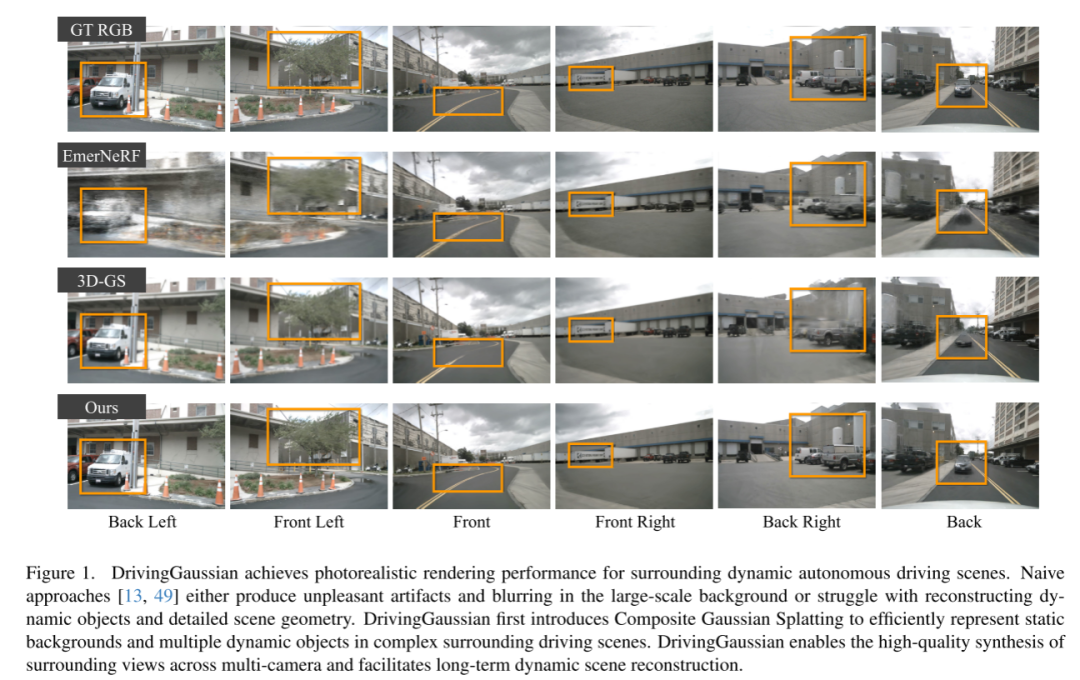
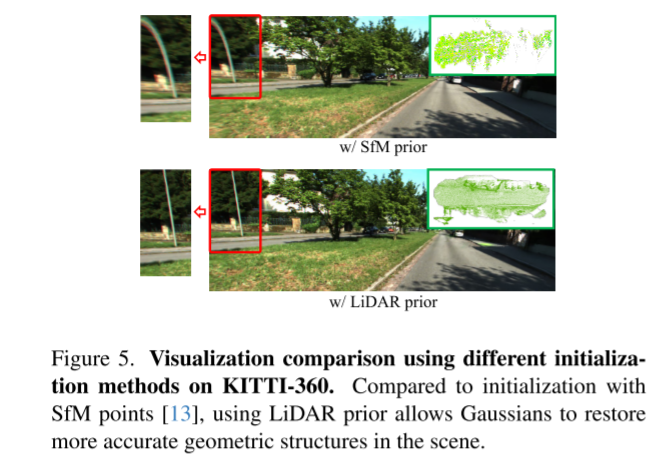
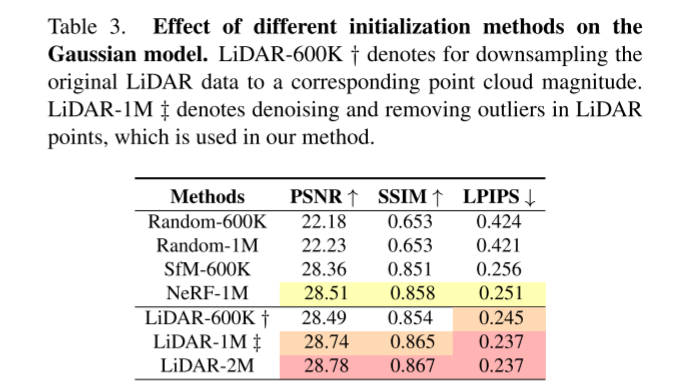
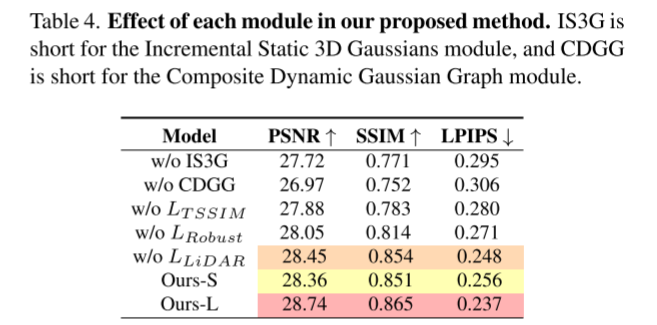
Kertas kerja ini mencadangkan DrivingGaussian, yang merupakan penyelesaian autonomis kecekapan tinggi dan kos efektif untuk pemanduan dinamik . Untuk adegan kompleks dengan objek bergerak, kertas ini mula-mula menggunakan Gaussian 3D statik tambahan untuk memodelkan latar belakang statik keseluruhan adegan secara berurutan dan progresif. Kemudian, kertas kerja ini menggunakan graf Gaussian dinamik komposit untuk memproses berbilang objek bergerak, membina semula setiap objek secara individu dan memulihkan kedudukan tepat dan hubungan oklusi mereka di tempat kejadian. Makalah ini selanjutnya menggunakan LiDAR priors untuk Gaussian Splatting untuk membina semula pemandangan dengan lebih terperinci dan mengekalkan konsistensi panorama. DrivingGaussian mengatasi kaedah sedia ada dalam pembinaan semula pemandangan memandu dan membolehkan sintesis pandangan sekeliling yang realistik dengan ketekalan tinggi dan konsisten berbilang kamera.
Menurut artikel ini, DrivingGaussian ialah rangka kerja pertama yang menggunakan teknologi percikan Gaussian komposit untuk representasi dan pemodelan pemandangan pemanduan dinamik berskala besar
Memperkenalkan dua modul novel Gaussian dinamik dan komposit dinamik 3D. Plot Gaussian. Yang pertama membina semula latar belakang statik secara berperingkat, manakala yang terakhir memodelkan berbilang objek dinamik menggunakan peta Gaussian. Dibantu oleh lidar priors, kaedah ini membantu memulihkan geometri lengkap dalam senario pemanduan berskala besar
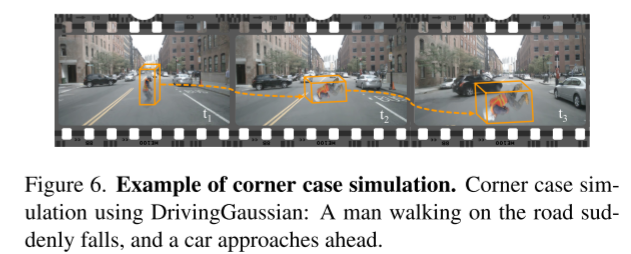
Eksperimen komprehensif menunjukkan bahawa DrivingGaussian mengatasi kaedah sebelumnya dalam mencabar tanda aras pemanduan autonomi dan mampu Mensimulasikan pelbagai situasi ekstrem untuk tugas hiliran
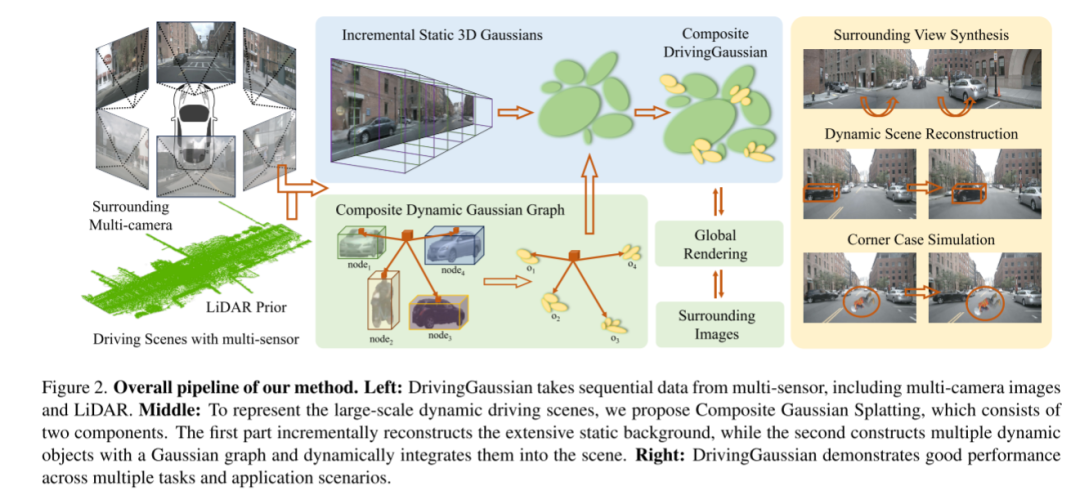
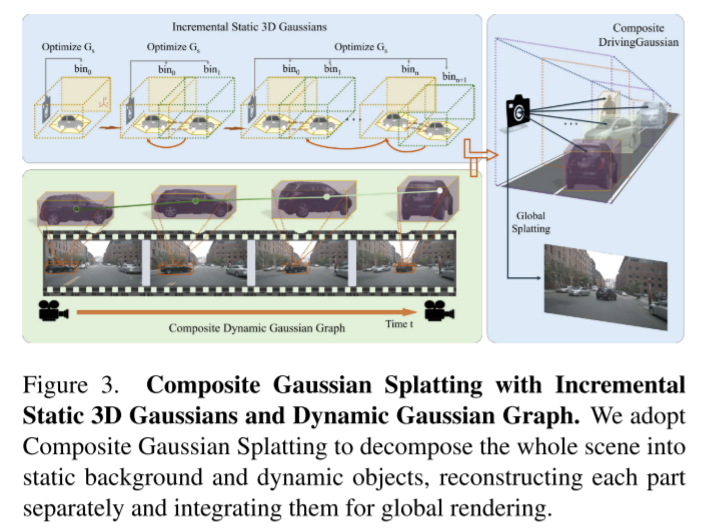
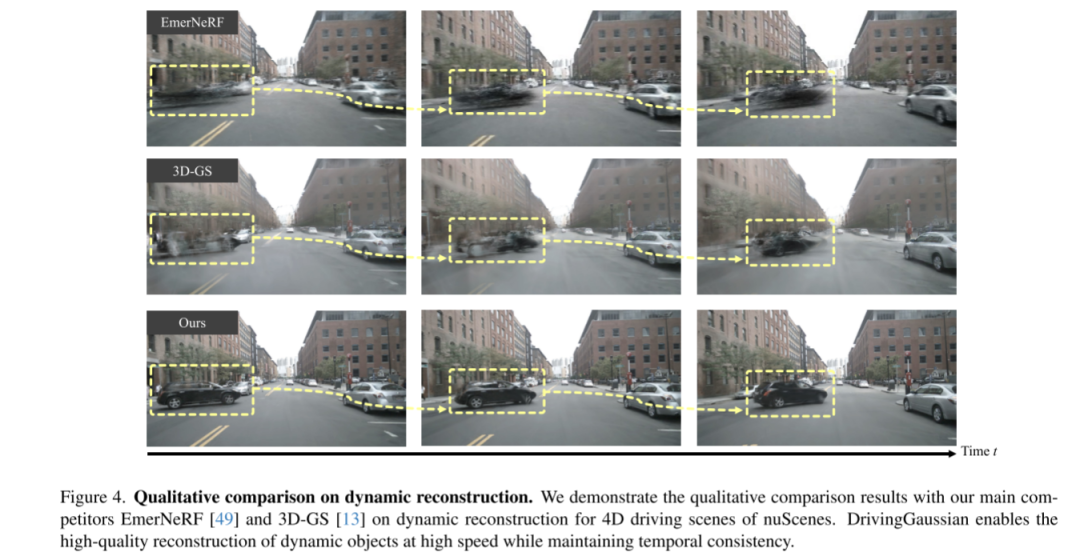
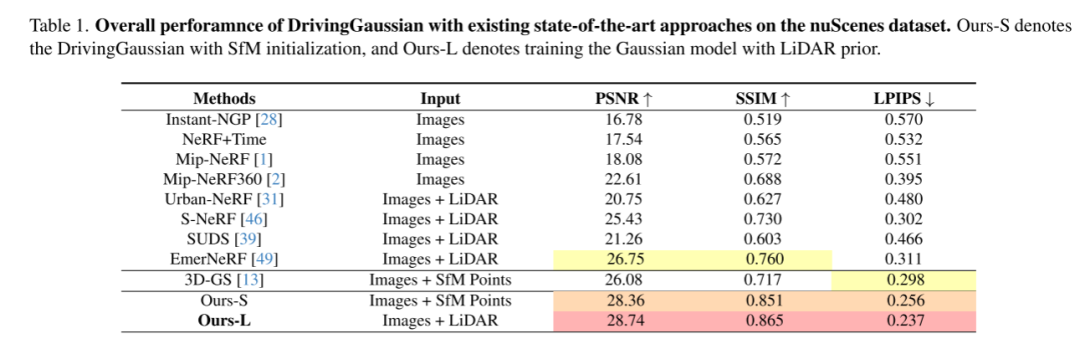
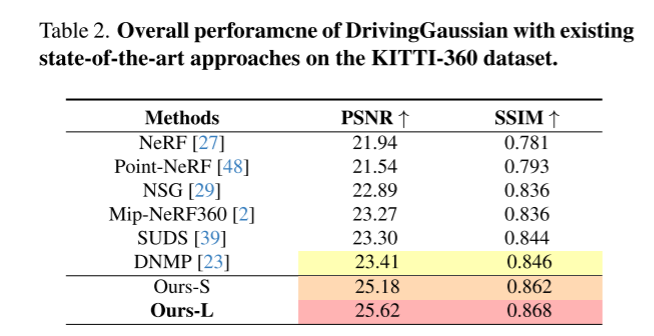

Artikel ini memperkenalkan DrivingGaussian, kaedah berdasarkan cadangan Composite Gaussian Splatting A rangka kerja baru untuk mewakili senario pemanduan autonomi dinamik berskala besar. DrivingGaussian memodelkan latar belakang statik secara progresif menggunakan Gaussian 3D statik tambahan dan menangkap berbilang objek bergerak menggunakan peta Gaussian dinamik komposit. Makalah ini selanjutnya mengeksploitasi sebelum LiDAR untuk mencapai geometri yang tepat dan konsistensi berbilang paparan. DrivingGaussian mencapai prestasi terkini pada dua set data pemanduan autonomi, membolehkan sintesis pandangan sekeliling berkualiti tinggi dan pembinaan semula pemandangan dinamik
🎜🎜Petikan: 🎜🎜🎜Zhou, X., Lin, Z., Shan, X. , Wang, Y., Sun, D., & Yang, M. (2023 DrivingGaussian: Percikan Gaussian Komposit untuk Pemandangan Pemanduan Dinamik ArXiv di sekelilingnya /abs/2312.07920🎜🎜🎜🎜l🎜:🎜🎜. m.sbmmt.com/link/a878dbebc902328b41dbf02aa87abb58🎜🎜Atas ialah kandungan terperinci Simulasi pemanduan lanjutan: Pembinaan semula pemandangan memandu dengan data sekeliling yang realistik. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
 Bagaimana untuk mengikat data dalam senarai lungsur
Bagaimana untuk mengikat data dalam senarai lungsur
 Koleksi arahan komputer yang biasa digunakan
Koleksi arahan komputer yang biasa digunakan
 djvu kepada pdf
djvu kepada pdf
 Laman web rasmi Binance
Laman web rasmi Binance
 Bagaimana untuk menyelesaikan masalah bahawa Apple tidak boleh memuat turun lebih daripada 200 fail
Bagaimana untuk menyelesaikan masalah bahawa Apple tidak boleh memuat turun lebih daripada 200 fail
 penggunaan CPU
penggunaan CPU
 Algoritma penjadualan cakera
Algoritma penjadualan cakera
 Bagaimana untuk menggunakan carian magnetik btbook
Bagaimana untuk menggunakan carian magnetik btbook








![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



