


Dalam pembuatan moden, inovasi dan pembangunan teknologi yang berterusan telah membawa kemungkinan baharu kepada proses pengeluaran. Dalam beberapa tahun kebelakangan ini, robot kolaboratif (Cobots), sebagai mesin kompak, bukan sahaja boleh melaksanakan pelbagai tugas, tetapi juga bekerjasama dengan pengendali manusia untuk meningkatkan kecekapan pengeluaran dengan berkesan. Memandangkan ciri-ciri perusahaan kecil dan sederhana dengan kumpulan pengeluaran kecil, tugas yang banyak dan kompleks, WIMI telah membangunkan penyelesaian terobosan bagi "pemasangan berasaskan antara muka otak-komputer dan teknologi kawalan berpandukan tangan", yang membawa prospek baharu kepada bidang pengeluaran
Proses pengeluaran tradisional selalunya memerlukan pengendali untuk melaburkan banyak kekuatan dan tenaga fizikal, terutamanya dalam persekitaran dengan tugas yang kompleks dan kebolehulangan yang tinggi, yang boleh menyebabkan keletihan pengendali dan peningkatan kesilapan dengan mudah. Pengenalan robot kolaboratif telah membawa peluang baharu kepada perusahaan. Robot kolaboratif, dengan saiz kompak dan ciri boleh atur caranya, boleh melakukan pelbagai tugas dan boleh mengurangkan beban kerja pengendali dan meningkatkan kecekapan pengeluaran. Khususnya untuk perusahaan kecil dan sederhana, pengenalan teknologi ini akan menjadi kelebihan daya saing yang penting.
Untuk mencapai komunikasi dan kerjasama yang cekap antara manusia dan robot kolaboratif, isu utama ialah cara mereka bentuk tugas dan strategi interaksi yang sesuai. Untuk menyelesaikan masalah ini, WIMI mencadangkan strategi berdasarkan antara muka otak-komputer, yang merealisasikan kawalan perintah pengendali robot kolaboratif melalui teknologi antara muka otak-komputer.
Teknologi holografik WIMI merealisasikan pemasangan dan kawalan manual berdasarkan antara muka otak-komputer, memainkan peranan penting dalam teknologi antara muka otak-komputer. Antara muka otak-komputer (BCI) ialah teknologi yang mengesan aktiviti otak dan menukarkannya kepada arahan yang boleh difahami oleh komputer. Dalam teknologi ini, pengendali dapat menghantar arahan kepada robot kolaboratif melalui kaedah potensi bangkitan visual keadaan mantap (SSVEP). Pendekatan ini membolehkan pengendali menukar mod misi tanpa menggunakan tangan mereka. Selain itu, teknologi ini juga memperkenalkan kawalan panduan manual Dengan memasang penderia daya enam komponen pada pergelangan tangan robot kolaboratif, kawalan berpandukan tangan robot kolaboratif dicapai
.Dalam keseluruhan proses pengeluaran dan pemasangan, penukaran tugas dan penyegerakan fasa adalah penting. Pemasangan berasaskan antara muka komputer otak dan teknologi kawalan berpandukan tangan WIMI membahagikan proses kerjasama kepada peringkat bebas dan peringkat sokongan. Dalam fasa bebas, robot dan operator bekerja dalam senario yang sama untuk menyelesaikan pelbagai tugas yang berbeza. Sebaik sahaja pengendali memerlukan bantuan daripada robot, dia boleh beralih ke peringkat sokongan untuk mencapai operasi kerjasama manusia-mesin. Pensuisan ini dicapai dengan pengendali menghantar mesej arahan dalam antara muka antara muka otak-komputer, dengan itu memaklumkan robot tentang niat untuk menukar lebih awal
Selain itu, pemasangan dan teknologi kawalan berpandukan tangan antara muka komputer otak holografik WIMI membentangkan rangka kerja yang lengkap dalam aplikasi praktikal. Operator boleh berinteraksi dengan robot kolaboratif melalui antara muka. Dari segi aktiviti berkaitan antara muka otak-komputer, pengendali merealisasikan kawalan arahan robot dengan memerhati imej Arahan ini dirujuk kepada pengawal robot selepas dikumpulkan dan diproses oleh elektrod. Sebaliknya, dengan kawalan panduan manual, pengendali boleh membimbing robot melalui penderia pada pergelangan tangan robot. Aliran keseluruhan proses pemasangan bergantung pada subtugas robot pra-program dan arahan masa nyata yang dikeluarkan oleh pengendali
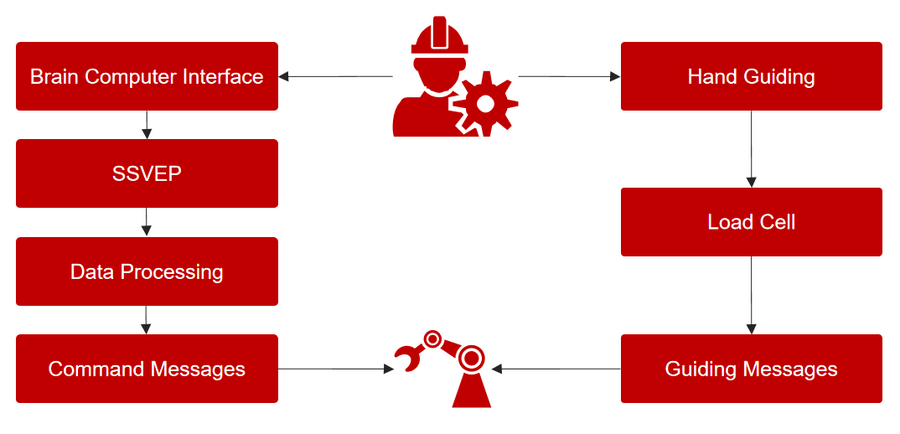
Keseluruhan proses daripada niat pengendali kepada tindakan sebenar robot kolaboratif. Proses ini melibatkan pelbagai pautan dan teknologi untuk memastikan bahawa niat pengendali boleh ditukar dengan tepat kepada tingkah laku robot, dengan itu mencapai operasi kerjasama manusia-mesin yang cekap.
Aplikasi teknologi antara muka otak-komputer (BCI): Teknologi antara muka otak-komputer adalah teras laluan teknikal. Dalam teknologi ini, aktiviti otak pengendali ditangkap dan ditukar kepada arahan yang boleh difahami oleh komputer, dengan itu mengawal robot kolaboratif. Dalam pemasangan berasaskan antara muka komputer otak dan teknologi kawalan berpandukan tangan WIMI, aplikasi teknologi antara muka otak-komputer mencapai niat bertukar untuk mod tugas yang berbeza melalui kaedah potensi bangkitan visual keadaan mantap (SSVEP)
Pengumpulan dan pemprosesan data: Langkah pertama dalam laluan teknikal ialah mengumpul dan memproses data mengenai aktiviti otak pengendali. Ini memerlukan meletakkan elektrod elektroensefalogram (EEG) pada kepala pengendali untuk menangkap isyarat elektrik yang dihasilkan oleh otak. Isyarat elektrik ini akan dihantar ke komputer untuk diproses bagi mengekstrak maklumat tentang niat pengendali
Penjanaan dan penghantaran arahan: Dengan menganalisis isyarat elektrik yang dihasilkan oleh otak pengendali, komputer boleh menjana arahan yang sepadan. Arahan ini mewakili niat pengendali untuk menukar mod misi. Arahan ini perlu dihantar kepada sistem kawalan robot kolaboratif untuk mengawal tingkah laku robot.
Aplikasi teknologi kawalan bimbingan manual: Dalam satu lagi cabang bidang teknologi ini, teknologi kawalan bimbingan manual digunakan untuk mencapai kawalan yang lebih tepat. Robot kolaboratif dilaksanakan menggunakan sensor daya enam komponen. Penderia boleh merasakan daya bimbingan tangan pengendali dan menghantar maklumat ini ke sistem kawalan robot
Kawalan dan pelaksanaan: Arahan yang dihasilkan oleh teknologi antara muka otak-komputer dan maklumat yang dihantar oleh teknologi kawalan panduan manual akhirnya dilaksanakan oleh sistem kawalan robot. Robot bertukar antara mod tugas yang berbeza mengikut niat pengendali, dengan itu beroperasi secara kolaboratif dalam peringkat yang berbeza.
Kandungan yang ditulis semula: Maklum balas dan penyegerakan: Langkah terakhir dalam laluan paparan teknikal melibatkan maklum balas dan penyegerakan. Sebaik sahaja robot melakukan tindakan yang sepadan, maklumat maklum balas boleh dihantar kepada operator untuk memastikan operator memahami tingkah laku dan status robot. Ini membantu pengendali melaraskan lagi komunikasi niat mereka, menghasilkan kerjasama manusia-mesin yang lebih baik
Setiap aspek teknologi holografik WIMI memerlukan definisi pembahagian kerja dan pelaksanaan untuk memastikan operasi kerjasama manusia-mesin yang cekap dan tepat. Kejayaan pembangunan teknologi inovatif ini telah membawa kemungkinan baharu kepada pembuatan moden, yang akan meningkatkan kecekapan pengeluaran, mengurangkan beban pengendali, dan memainkan peranan positif dalam perusahaan kecil dan sederhana
Jelas sekali, "pemasangan berasaskan antara muka otak-komputer dan teknologi kawalan berpandukan tangan" WIMI Hologram telah membawa peluang yang belum pernah berlaku sebelum ini kepada perusahaan kecil dan sederhana Dengan menggabungkan teknologi antara muka komputer otak dan teknologi kawalan berpandukan tangan, pengendali boleh Ini akan sangat meningkatkan kecekapan dan kualiti proses pengeluaran, mengurangkan beban pengendali, dan mengurangkan kadar ralat, menandakan peringkat baharu dalam pembuatan moden.
Atas ialah kandungan terperinci Merealisasikan kerjasama manusia-mesin dalam pengeluaran dan pemasangan: Pemasangan pembangunan holografik WIMI dan teknologi kawalan berpandukan tangan berdasarkan antara muka otak-komputer. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
















![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



