


Artikel ini akan memperkenalkan kaedah untuk menjana imej paparan jalan berbilang perspektif dengan tepat melalui reka letak BEV Sketch

Dalam bidang pemanduan autonomi, sintesis imej Digunakan secara meluas untuk meningkatkan prestasi tugas persepsi hiliran
Dalam bidang penglihatan komputer, masalah penyelidikan yang telah lama wujud dalam meningkatkan prestasi model persepsi dicapai dengan mensintesis imej. Dalam sistem pemanduan autonomi bertumpu penglihatan, menggunakan kamera berbilang pandangan, masalah ini menjadi lebih ketara kerana beberapa adegan ekor panjang tidak boleh dikumpulkan
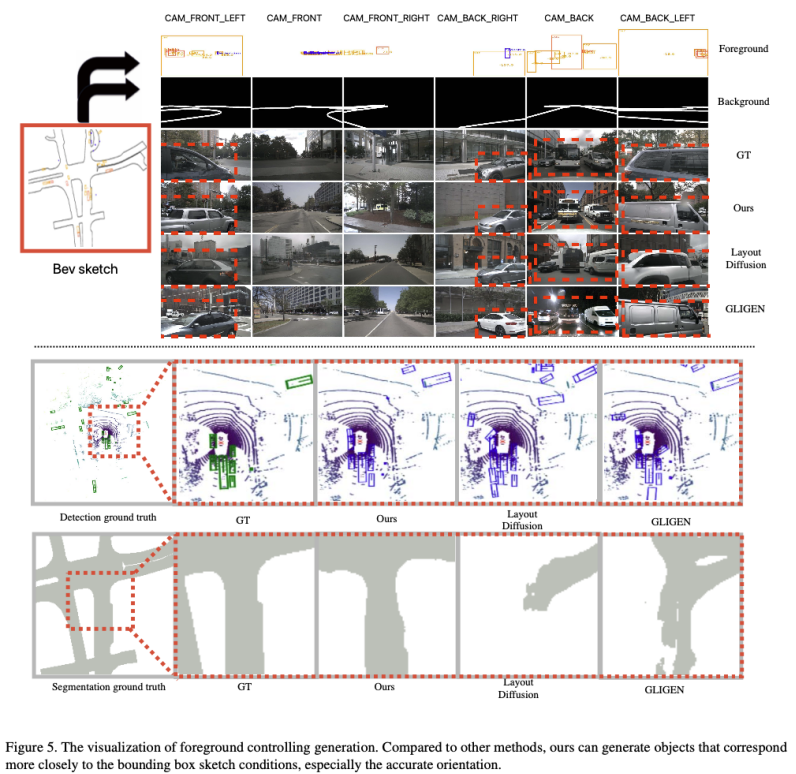
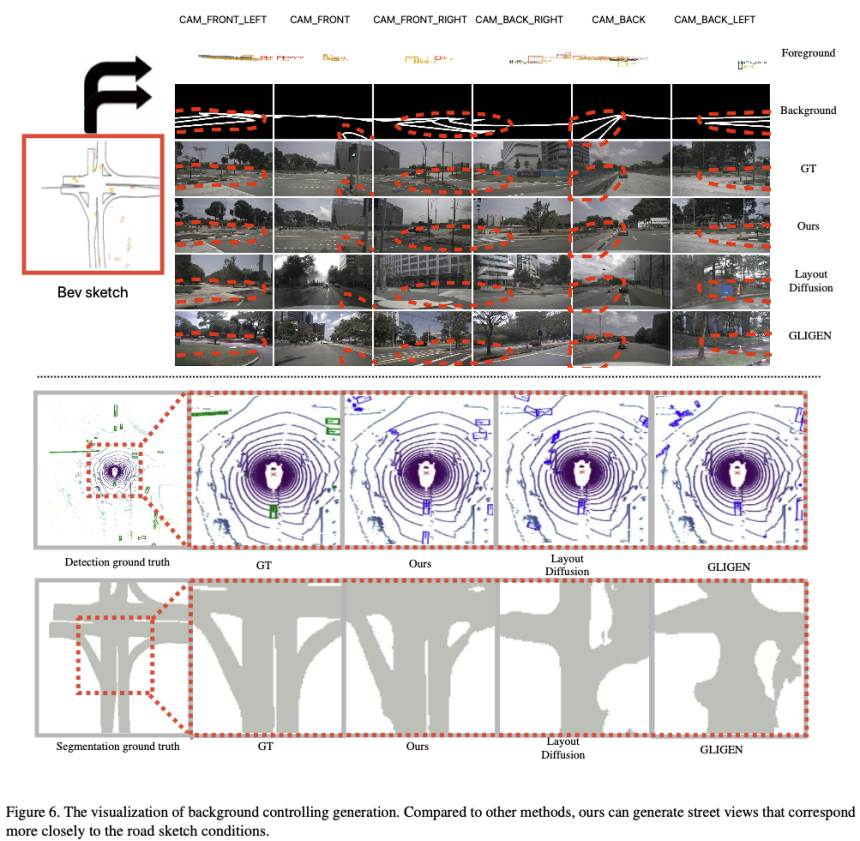
Seperti yang ditunjukkan dalam Rajah 1(a), kaedah penjanaan yang sedia ada memasukkan semantik. struktur BEV gaya segmentasi ke dalam rangkaian penjanaan dan mengeluarkan imej berbilang paparan yang munasabah. Apabila dinilai semata-mata pada metrik peringkat pemandangan, kaedah sedia ada nampaknya mampu mensintesis imej paparan jalan fotorealistik. Walau bagaimanapun, setelah dizum masuk, kami mendapati ia gagal menghasilkan butiran peringkat objek yang tepat. Dalam rajah tersebut, kami menunjukkan kesilapan biasa algoritma penjanaan terkini, iaitu kenderaan yang dijana sepenuhnya berorientasikan ke arah bertentangan berbanding dengan kotak sempadan 3D sasaran. Tambahan pula, menyunting struktur BEV dalam gaya segmentasi semantik adalah tugas yang sukar dan memerlukan banyak tenaga kerja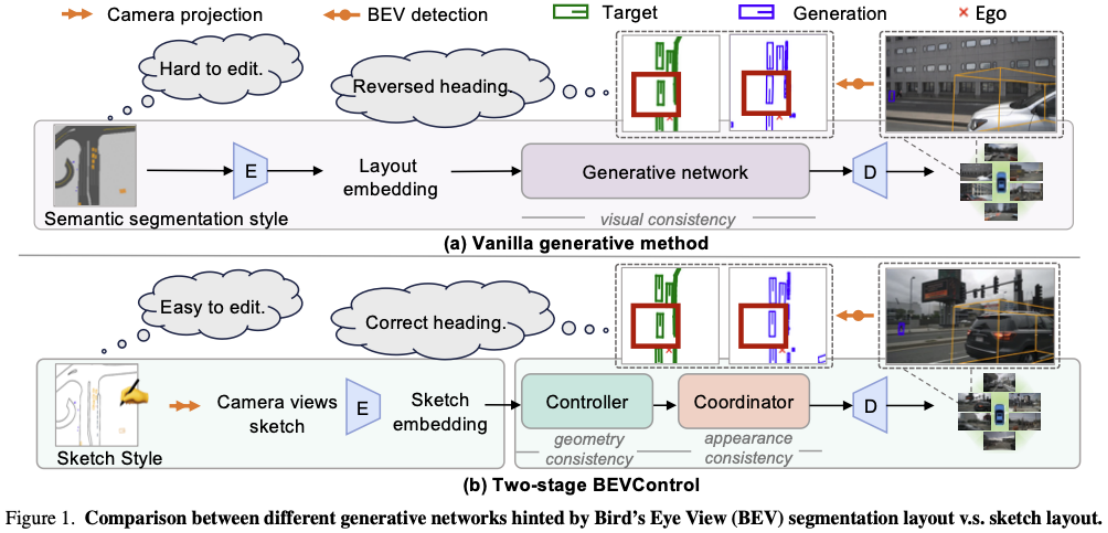 Oleh itu, kami mencadangkan kaedah dua peringkat bernama BEVControl untuk menyediakan latar belakang yang lebih halus dan kawalan geometri latar depan, seperti yang ditunjukkan dalam Rajah 1(b). BEVControl menyokong input struktur BEV gaya lakaran, membolehkan pengeditan cepat dan mudah. Selain itu, BEVControl kami menguraikan konsistensi visual kepada dua sub-matlamat: konsistensi geometri antara pemandangan jalan dan pandangan mata burung melalui Konsistensi penampilan antara pemandangan jalan melalui Penyelaras# 🎜🎜#
Oleh itu, kami mencadangkan kaedah dua peringkat bernama BEVControl untuk menyediakan latar belakang yang lebih halus dan kawalan geometri latar depan, seperti yang ditunjukkan dalam Rajah 1(b). BEVControl menyokong input struktur BEV gaya lakaran, membolehkan pengeditan cepat dan mudah. Selain itu, BEVControl kami menguraikan konsistensi visual kepada dua sub-matlamat: konsistensi geometri antara pemandangan jalan dan pandangan mata burung melalui Konsistensi penampilan antara pemandangan jalan melalui Penyelaras# 🎜🎜#
#🎜🎜 #
Pautan kertas: //m.sbmmt.com/link/1531beb762df4029513ebf9295e0d34f#🎜 🎜##🎜🎜🎜🎜🎜🎜🎜🎜🎜 #Kaedah Rangka Kerja
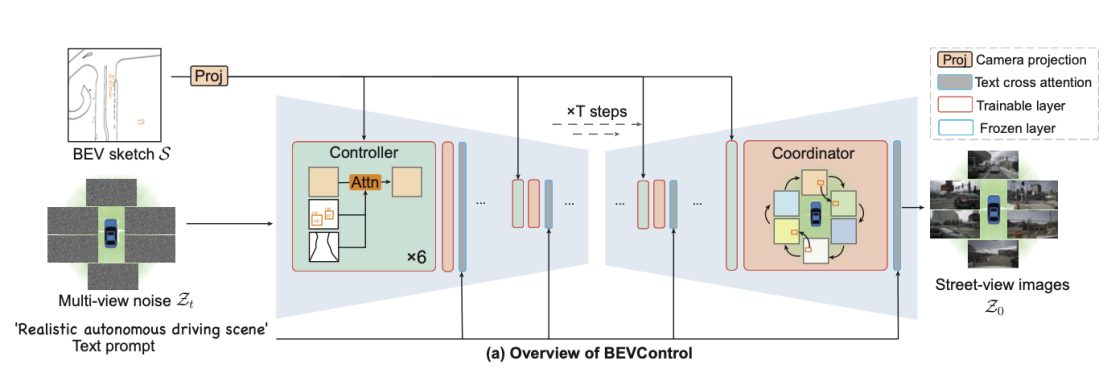
#🎜🎜 #BEVControl ialah rangkaian terjana daripada struktur UNet daripada modul. Setiap modul mempunyai dua elemen iaitu Pengawal dan Penyelaras.
 Perincian kaedah
Perincian kaedah
 Oleh itu, kami mencadangkan satu set penunjuk penilaian untuk mengukur keupayaan kawalan rangkaian penjanaan.
Oleh itu, kami mencadangkan satu set penunjuk penilaian untuk mengukur keupayaan kawalan rangkaian penjanaan.

Kandungan yang perlu ditulis semula ialah: Rujukan
Xu R , Zhou B . Menjana imej paparan jalan daripada reka letak pandangan mata burung[J].
Atas ialah kandungan terperinci Latar belakang yang lebih berbutir dan kawalan latar depan, pengeditan yang lebih pantas: Pendekatan dua peringkat BEVControl. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
 Bagaimana untuk menyimpan gambar di ruang komen Douyin ke telefon bimbit
Bagaimana untuk menyimpan gambar di ruang komen Douyin ke telefon bimbit
 Sepuluh kedudukan pertukaran mata wang digital teratas
Sepuluh kedudukan pertukaran mata wang digital teratas
 Sebab mengapa fungsi pengepala mengembalikan 404 kegagalan
Sebab mengapa fungsi pengepala mengembalikan 404 kegagalan
 Pemalam tv mangga
Pemalam tv mangga
 Apakah atribut javabean?
Apakah atribut javabean?
 pelayar wap
pelayar wap
 Analisis keberkesanan kos pembelajaran python dan c++
Analisis keberkesanan kos pembelajaran python dan c++
 apakah alamat mac
apakah alamat mac








![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



