


Pernahkah anda terfikir bagaimana dron menavigasi melalui persekitaran yang kompleks? Dalam blog ini, kami akan mencipta sistem navigasi dron mudah menggunakan Python, Matplotlib dan algoritma A*. Pada akhirnya, anda akan mempunyai sistem kerja yang menggambarkan dron menyelesaikan labirin!
Untuk membina sistem navigasi dron kami, kami memerlukan perkara berikut:
Tetapi pertama, mari kita semak beberapa istilah AI asas untuk mereka yang baharu.
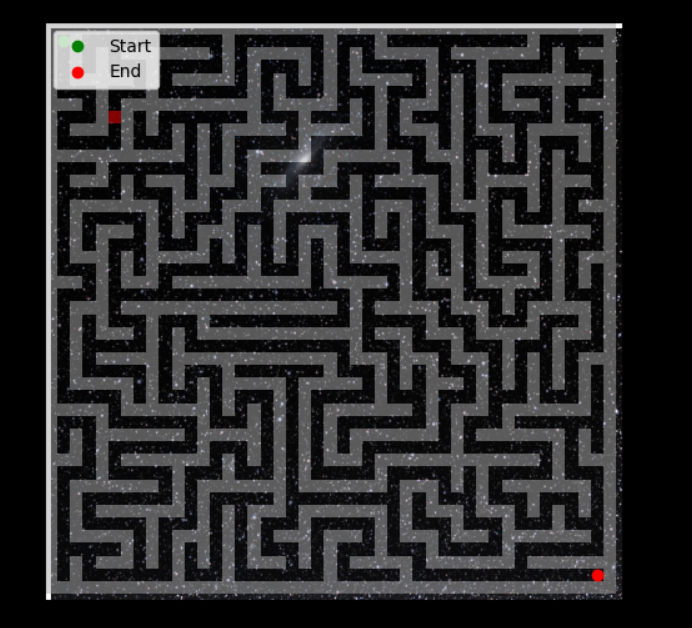
Don kami akan menavigasi maze 2D. Maze akan terdiri daripada:
Objektif dron:
Begini rupa labirin itu:
Mula-mula, pasang dan import perpustakaan yang diperlukan:
import matplotlib.pyplot as plt import numpy as np import random import math from heapq import heappop, heappush
Mari tentukan saiz labirin:
ular sawa
LEBAR, TINGGI = 22, 22
Dalam navigasi dunia sebenar, pergerakan ke arah yang berbeza boleh mempunyai kos yang berbeza-beza. Contohnya, bergerak ke utara mungkin lebih sukar daripada bergerak ke timur.
DIRECTIONAL_WEIGHTS = {'N': 1.2, 'S': 1.0, 'E': 1.5, 'W': 1.3}
DIRECTIONS = {'N': (-1, 0), 'S': (1, 0), 'E': (0, 1), 'W': (0, -1)}
Kita mulakan dengan grid yang dipenuhi dengan dinding (1s):
import matplotlib.pyplot as plt import numpy as np import random import math from heapq import heappop, heappush
The numpy. fungsi ones() digunakan untuk mencipta tatasusunan baharu bagi bentuk dan jenis tertentu, diisi dengan satu... berguna dalam memulakan tatasusunan dengan nilai lalai.
Sekarang mari kita tentukan fungsi yang akan "mengukir" laluan dalam mez anda yang kini dimulakan dengan hanya dinding
DIRECTIONAL_WEIGHTS = {'N': 1.2, 'S': 1.0, 'E': 1.5, 'W': 1.3}
DIRECTIONS = {'N': (-1, 0), 'S': (1, 0), 'E': (0, 1), 'W': (0, -1)}
maze = np.ones((2 * WIDTH + 1, 2 * HEIGHT + 1), dtype=int)
Gunakan Matplotlib untuk memaparkan maze:
def carve(x, y):
maze[2 * x + 1, 2 * y + 1] = 0 # Mark current cell as a path
directions = list(DIRECTIONS.items())
random.shuffle(directions) # Randomize directions
for _, (dx, dy) in directions:
nx, ny = x + dx, y + dy
if 0 <= nx < WIDTH and 0 <= ny < HEIGHT and maze[2 * nx + 1, 2 * ny + 1] == 1:
maze[2 * x + 1 + dx, 2 * y + 1 + dy] = 0
carve(nx, ny)
carve(0, 0) # Start carving from the top-left corner
Algoritma A* mencari laluan terpendek dalam maze berwajaran menggunakan gabungan kos laluan dan heuristik.
Kami menggunakan jarak Euclidean sebagai heuristik kami:
start = (1, 1) end = (2 * WIDTH - 1, 2 * HEIGHT - 1) maze[start] = 0 maze[end] = 0
fig, ax = plt.subplots(figsize=(8, 6))
ax.imshow(maze, cmap='binary', interpolation='nearest')
ax.set_title("2D Maze")
plt.show()
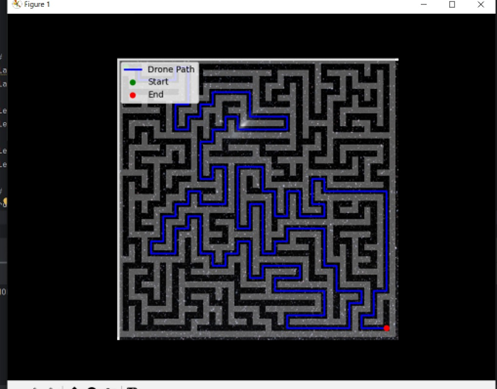
Kami mempunyai labirin tetapi anda masih belum dapat melihat laluan dron itu.
Mari kita bayangkan laluan dron:
def heuristic(a, b):
return math.sqrt((a[0] - b[0]) ** 2 + (a[1] - b[1]) ** 2)
Tahniah! ? Anda telah membina sistem navigasi dron yang berfungsi:
Jangan ragu untuk berkongsi keputusan anda atau bertanya soalan dalam ulasan di bawah.
Ke infiniti dan seterusnya ?
Atas ialah kandungan terperinci Membina sistem navigasi dron menggunakan algoritma matplotlib dan A*. Untuk maklumat lanjut, sila ikut artikel berkaitan lain di laman web China PHP!
 Kaedah penugasan tatasusunan rentetan
Kaedah penugasan tatasusunan rentetan
 Mengapa melumpuhkan kemas kini automatik dalam Windows 11 adalah tidak sah
Mengapa melumpuhkan kemas kini automatik dalam Windows 11 adalah tidak sah
 Bagaimana untuk membenamkan gaya CSS dalam HTML
Bagaimana untuk membenamkan gaya CSS dalam HTML
 Perbezaan antara telefon gantian rasmi dan telefon baharu
Perbezaan antara telefon gantian rasmi dan telefon baharu
 Tidak dapat membuka gedung aplikasi
Tidak dapat membuka gedung aplikasi
 Peranan fungsi parseint
Peranan fungsi parseint
 Pengesyoran perisian desktop Android
Pengesyoran perisian desktop Android
 Harga pasaran Ethereum hari ini
Harga pasaran Ethereum hari ini








![[Web front-end] Permulaan pantas Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



