

대형 모델의 뛰어난 성능은 누구나 다 아는 사실이며, 이를 로봇에 접목하게 된다면 로봇은 더욱 지능적인 두뇌를 가지게 되어 자율주행, 홈로봇, 산업용 로봇 등 로봇공학 분야에 새로운 가능성을 가져올 것으로 기대됩니다. 로봇, 보조 로봇, 의료 로봇, 필드 로봇 및 멀티 로봇 시스템.
사전 훈련된 LLM(대형 언어 모델), VLM(대형 시각 언어 모델), ALM(대형 오디오 언어 모델) 및 VNM(대형 시각적 탐색 모델)을 사용하여 로봇 공학 분야의 다양한 문제를 더 잘 처리할 수 있습니다. 일. 기본 모델을 로봇공학에 통합하는 것은 빠르게 성장하는 분야이며, 로봇공학 커뮤니티는 최근 다시 작성해야 하는 로봇공학 분야(인식, 예측, 계획 및 제어)에서 이러한 대형 모델의 사용을 탐색하기 시작했습니다.
최근 스탠포드대, 프린스턴대, 엔비디아, 구글 딥마인드 등으로 구성된 공동 연구팀은 로봇 연구 분야 기본 모델의 개발과 향후 과제를 요약한 리뷰 보고서를 발표했습니다
Paper 주소: https://arxiv.org/pdf/2312.07843.pdf
재작성된 내용은 다음과 같습니다. 종이 라이브러리: https://github.com/robotics-survey/Awesome-Robotics-Foundation -Models
팀원 중에는 Zhu Yuke, Song Shuran, Wu Jiajun, Lu Cewu 등 우리가 잘 아는 중국 학자가 많이 있습니다.
대규모 데이터를 활용하여 광범위하게 사전 학습된 기본 모델은 미세 조정 후 다양한 다운스트림 작업에 적용할 수 있습니다. 이러한 기본 모델은 BERT, GPT-3, GPT-4, CLIP, DALL-E 및 PaLM-E와 같은 관련 모델을 포함하여 시각 및 언어 처리 분야에서 획기적인 발전을 이루었습니다
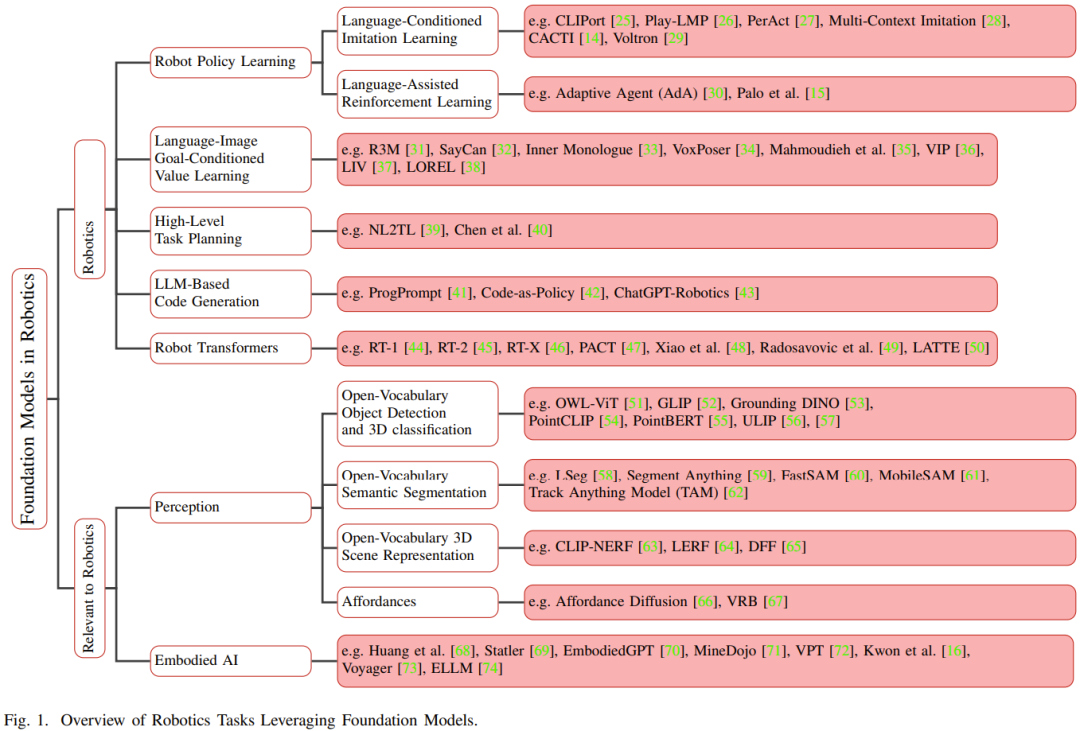
기본 모델이 등장하기 전에는 로봇용 기존 딥 러닝 모델은 다양한 작업을 위해 수집된 제한된 데이터 세트를 사용하여 학습됩니다. 이와 대조적으로 기본 모델은 광범위하고 다양한 데이터를 사용하여 사전 훈련되었으며 자연어 처리, 컴퓨터 비전 및 의료와 같은 다른 영역에서 적응성, 일반화 및 전반적인 성능을 입증했습니다. 결국 기본 모델은 로봇 분야에서도 그 잠재력을 발휘할 것으로 기대된다. 그림 1은 로봇공학 분야의 기본 모델의 개요를 보여줍니다.
작업별 모델에 비해 기본 모델에서 지식을 이전하면 교육 시간과 컴퓨팅 리소스를 줄일 수 있는 잠재력이 있습니다. 특히 로봇 관련 분야에서 다중 모드 기본 모델은 다양한 센서에서 수집된 다중 모드 이질적 데이터를 로봇 이해 및 추론에 필요한 컴팩트한 동종 표현으로 융합하고 정렬할 수 있습니다. 학습한 표현은 인식, 의사결정, 제어 등 다시 작성해야 하는 표현을 포함하여 자동화 기술 스택의 모든 부분에서 사용할 수 있습니다.
그뿐만 아니라 기본 모델은 제로샷 학습 기능도 제공할 수 있어 AI 시스템이 예제나 목표 교육 없이 작업을 수행할 수 있습니다. 이를 통해 로봇은 학습한 지식을 새로운 사용 사례에 일반화하여 구조화되지 않은 환경에서 로봇의 적응성과 유연성을 향상시킬 수 있습니다.
기본 모델을 로봇 시스템에 통합하면 로봇의 환경 인식 능력과 환경과의 상호 작용 능력이 향상될 수 있습니다. 다시 작성해야 할 맥락인 지각 로봇 시스템을 실현할 수 있습니다.
예를 들어, 다시 작성해야 할 사항은 다음과 같습니다. 지각 분야에서 대규모 시각 언어 모델(VLM)은 시각 데이터와 텍스트 데이터 간의 연관성을 학습하여 모달 간 이해 기능을 갖추고 이를 통해 도움을 줄 수 있습니다. 제로샷 이미지 분류, 제로 샘플 객체 감지 및 3D 분류와 같은 작업. 또 다른 예로, 3D 세계에서 언어 기반(즉, VLM의 상황별 이해를 3D 실제 세계와 정렬)은 발화를 3D 환경의 특정 개체, 위치 또는 동작과 연결하여 로봇의 공간 요구 사항을 향상시킬 수 있습니다. : 인지하는 능력.
의사결정 또는 계획 분야에서 연구에 따르면 LLM과 VLM은 로봇이 상위 수준 계획과 관련된 작업을 지정하는 데 도움을 줄 수 있는 것으로 나타났습니다.
작업, 탐색 및 상호 작용과 관련된 언어 신호를 활용하여 로봇은 더 복잡한 작업을 수행할 수 있습니다. 예를 들어, 모방학습, 강화학습 등의 로봇 정책학습 기술의 경우 기본 모델은 데이터 효율성과 맥락 이해를 향상시키는 능력을 갖춘 것으로 보인다. 특히, 언어 기반 보상은 형성된 보상을 제공하여 강화 학습 에이전트를 안내할 수 있습니다.
또한 연구자들은 이미 언어 모델을 사용하여 정책 학습 기술에 대한 피드백을 제공하고 있습니다. 일부 연구에 따르면 VLM 모델의 시각적 질문 응답(VQA) 기능이 로봇 사용 사례에 사용될 수 있는 것으로 나타났습니다. 예를 들어, 연구자들은 VLM을 사용하여 로봇이 작업을 완료하는 데 도움이 되는 시각적 콘텐츠와 관련된 질문에 답했습니다. 또한 일부 연구자들은 VLM을 사용하여 데이터 주석을 지원하고 시각적 콘텐츠에 대한 설명 레이블을 생성합니다.
기본 모델은 비전 및 언어 처리 분야에서 혁신적인 기능을 갖추고 있지만 실제 로봇 작업을 위한 기본 모델의 일반화 및 미세 조정은 여전히 매우 어렵습니다.
이러한 과제는 다음과 같습니다.
1) 데이터 부족: 로봇 작동, 위치 지정 및 탐색과 같은 작업을 지원하기 위해 인터넷 규모의 데이터를 얻는 방법과 이러한 데이터를 자기 감독 교육에 사용하는 방법
2) 큰 차이점: 기본 모델에 필요한 일반성을 유지하면서 다양한 물리적 환경, 물리적 로봇 플랫폼 및 잠재적인 로봇 작업을 처리하는 방법
3) 불확실성 정량화 문제: 인스턴스 수준 불확실성을 해결하는 방법 (예: 언어 모호성 또는 LLM 환상), 배포 수준 불확실성 및 배포 변경 문제, 특히 폐쇄 루프 로봇 배포로 인한 배포 변경 문제.
4) 안전성 평가: 기본 모델을 기반으로 로봇 시스템을 배포 전, 업데이트 과정, 작업 과정에서 엄격하게 테스트하는 방법입니다.
5) 실시간 성능: 로봇의 기본 모델 배포를 방해하는 일부 기본 모델의 긴 추론 시간을 처리하는 방법과 온라인 의사 결정에 필요한 기본 모델의 추론을 가속화하는 방법- 만들기.
이 리뷰 논문은 로봇 공학 분야의 기본 모델의 현재 사용을 요약합니다. 연구자들은 현재의 방법, 적용 및 과제를 조사하고 이러한 과제를 해결하기 위한 향후 연구 방향을 제안합니다. 또한 로봇 자율성을 달성하기 위해 기본 모델을 사용하는 데 존재할 수 있는 잠재적인 위험을 지적했습니다.
기본 모델 배경 지식
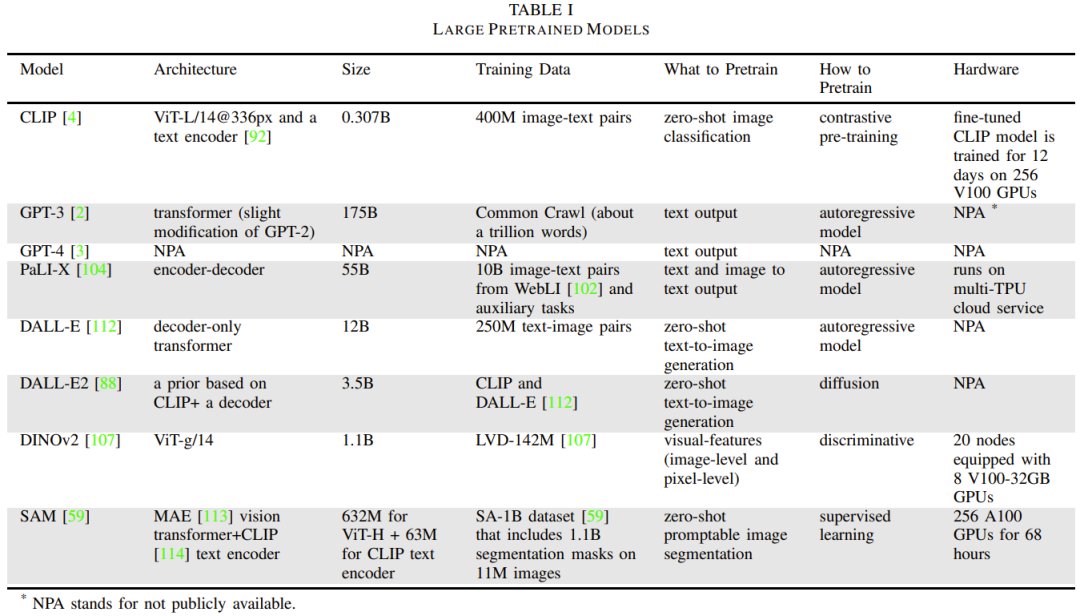
기본 모델은 수십억 개의 매개변수를 가지며 인터넷 수준의 대규모 데이터를 사용하여 사전 훈련됩니다. 이렇게 크고 복잡한 모델을 훈련하는 데는 비용이 매우 많이 듭니다. 데이터 획득, 처리, 관리 비용도 높을 수 있습니다. 훈련 과정에는 많은 양의 컴퓨팅 리소스가 필요하고, GPU나 TPU와 같은 전용 하드웨어를 사용해야 하며, 모델 훈련을 위한 소프트웨어와 인프라도 필요하므로 모두 재정적 투자가 필요합니다. 또한 기본 모델의 학습 시간도 매우 길어서 비용도 많이 듭니다. 따라서 이러한 모델은 종종 플러그형 모듈로 사용됩니다. 즉, 광범위한 사용자 정의 작업 없이 기본 모델을 다양한 애플리케이션에 통합합니다.
표 1에는 일반적으로 사용되는 기본 모델의 세부 정보가 나와 있습니다.
이 섹션에서는 LLM, 시각적 변환기, VLM, 구현된 다중 모달 언어 모델 및 시각적 생성 모델에 중점을 둡니다. 또한 기본 모델을 훈련하는 데 사용되는 다양한 훈련 방법도 소개됩니다
먼저 토큰화, 생성 모델, 판별 모델, 트랜스포머 아키텍처, 자동 회귀 모델, 마스크 자동 인코딩, 대조 학습을 포함하는 몇 가지 관련 용어와 수학적 지식을 소개합니다. 및 확산 모델.
그런 다음 LLM(Large Language Models)의 예와 역사적 배경을 소개합니다. 이후에는 시각적 변환기(Visual Transformer), 다중 모드 비전 언어 모델(VLM), 구체화된 다중 모드 언어 모델, 시각적 생성 모델이 강조되었습니다.
로봇 연구
이 섹션에서는 로봇 의사 결정, 계획 및 제어에 중점을 둡니다. 이 영역에서는 LLM(대형 언어 모델)과 VLM(시각 언어 모델) 모두 로봇의 기능을 향상시키는 데 사용될 수 있는 잠재력을 가지고 있습니다. 예를 들어, LLM은 로봇이 인간으로부터 높은 수준의 지시를 받고 해석할 수 있도록 작업 지정 프로세스를 용이하게 할 수 있습니다.
VLM도 이 분야에 기여할 것으로 기대됩니다. VLM은 시각적 데이터 분석에 탁월합니다. 로봇이 정보에 입각한 결정을 내리고 복잡한 작업을 수행하려면 시각적 이해가 중요합니다. 이제 로봇은 자연어 신호를 사용하여 조작, 탐색 및 상호 작용과 관련된 작업을 수행하는 능력을 향상시킬 수 있습니다.
목표 기반의 시각적 언어 정책 학습(모방 학습이든 강화 학습이든)이 기본 모델을 통해 향상될 것으로 예상됩니다. 언어 모델은 정책 학습 기술에 대한 피드백도 제공할 수 있습니다. 이 피드백 루프는 로봇이 LLM에서 받은 피드백을 기반으로 작업을 최적화할 수 있으므로 로봇의 의사 결정 능력을 지속적으로 향상시키는 데 도움이 됩니다.
이 섹션에서는 로봇 의사 결정 분야에서 LLM 및 VLM의 적용에 중점을 둡니다.
이 섹션은 6개 부분으로 나누어져 있습니다. 첫 번째 부분에서는 언어 기반 모방 학습, 언어 기반 강화 학습 등 의사 결정 및 제어와 로봇을 위한 정책 학습을 소개합니다.
두 번째 부분은 목표 기반 언어-이미지 가치 학습입니다.
세 번째 부분에서는 언어 지침을 통해 작업을 설명하고 언어 모델을 사용하여 작업 계획을 위한 코드를 생성하는 등 로봇 작업을 계획하기 위해 대규모 언어 모델을 사용하는 방법을 소개합니다.
네 번째 부분은 의사결정을 위한 상황별 학습(ICL)입니다.
다음으로 소개할 것은 로봇트랜스포머
여섯번째는 로봇 내비게이션과 개방형 어휘도서관 운영입니다.
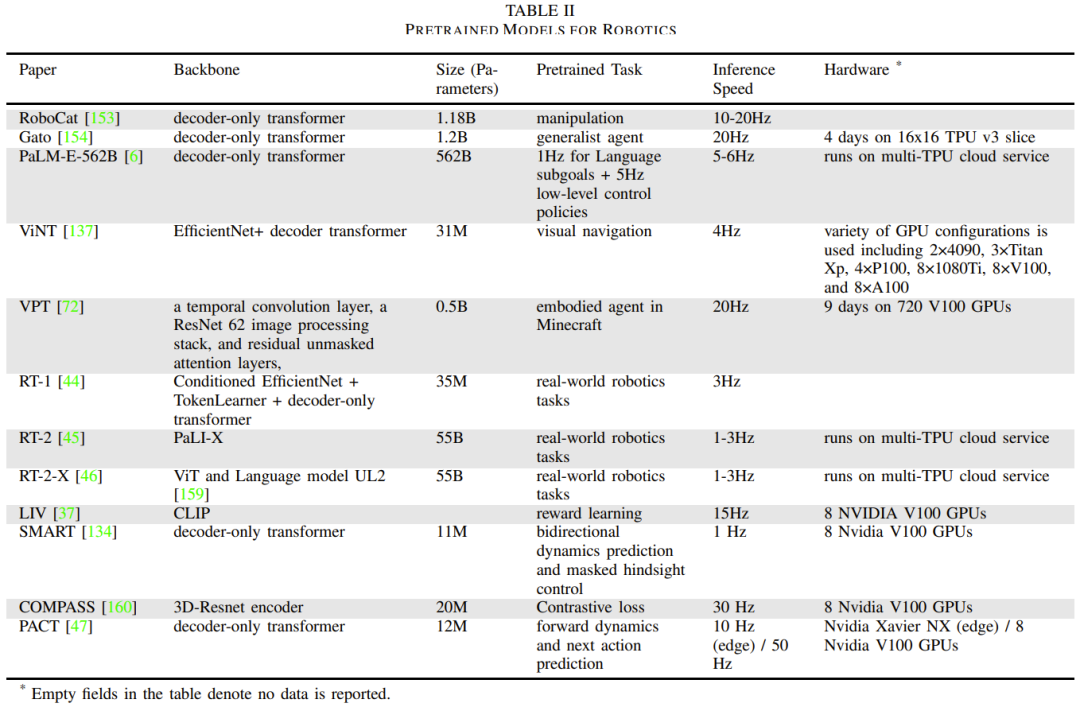
표 2는 모델 크기 및 아키텍처, 사전 훈련 작업, 추론 시간 및 하드웨어 설정을 보고하는 몇 가지 기본 로봇별 모델을 제공합니다.
다시 작성해야 할 것은 인식
입니다.주변 환경과 상호 작용하는 로봇은 이미지, 비디오, 오디오, 언어 등 다양한 양식으로 감각 정보를 수신합니다. 이 고차원 데이터는 로봇이 환경을 이해하고, 추론하고, 상호 작용하는 데 중요합니다. 기본 모델은 이러한 고차원 입력을 해석하고 조작하기 쉬운 추상 구조 표현으로 변환할 수 있습니다. 특히 다중 모드 기본 모델을 사용하면 로봇은 다양한 감각의 입력을 의미, 공간, 시간 및 어포던스 정보가 포함된 통합 표현으로 통합할 수 있습니다. 이러한 다중 모드 모델에는 교차 모드 상호 작용이 필요하며 일관성과 상호 대응을 보장하기 위해 다양한 양식의 요소를 정렬해야 하는 경우가 많습니다. 예를 들어, 이미지 설명 작업에는 텍스트와 이미지 데이터의 정렬이 필요합니다.
이 섹션에서는 로봇이 다시 작성해야 하는 사항, 즉 인식과 관련된 일련의 작업에 중점을 둘 것입니다. 이는 양식을 정렬하기 위해 기본 모델을 사용하여 개선할 수 있습니다. 비전과 언어에 중점을 두고 있습니다.
이 섹션은 다섯 부분으로 나누어져 있는데, 먼저 개방형 어휘의 표적 검출 및 3차원 분류, 개방형 어휘의 의미적 분할, 개방형 어휘의 3차원 장면 및 표적 표현, 그 다음으로 학습된 어포던스, 최종적으로 예측 모델.
Embodied AI
최근 일부 연구에 따르면 LLM은 구체화된 AI 분야에서 성공적으로 사용될 수 있는 것으로 나타났습니다. 여기서 "embodied"는 일반적으로 실제 로봇 몸체를 갖는 것이 아니라 월드 시뮬레이터의 가상 구현을 의미합니다.
이 분야에서 몇 가지 흥미로운 프레임워크, 데이터 세트 및 모델이 등장했습니다. 특히 주목할 점은 구체화된 에이전트를 훈련하기 위한 플랫폼으로 Minecraft 게임을 사용한다는 것입니다. 예를 들어 Voyager는 GPT-4를 사용하여 Minecraft 환경을 탐색하는 에이전트를 안내합니다. GPT-4의 모델 매개변수를 미세 조정할 필요 없이 상황별 프롬프트 설계를 통해 GPT-4와 상호 작용할 수 있습니다.
강화 학습은 로봇 학습 분야에서 중요한 연구 방향입니다. 연구자들은 강화 학습을 최적화하기 위해 기본 모델을 사용하여 보상 기능을 설계하려고 합니다.
로봇이 높은 수준의 계획을 수행하기 위해 연구자들은 기본 모델의 사용을 탐구해 왔습니다. 도움을 주는 모델. 또한 일부 연구자들은 체화된 지능에 사고 사슬 기반 추론 및 행동 생성 방법을 적용하려고 노력하고 있습니다.
도전 과제 및 향후 방향
이 섹션에서는 로봇의 기본 모델 사용과 관련된 과제를 제공합니다. 또한 팀은 이러한 과제를 해결할 수 있는 향후 연구 방향을 탐색할 것입니다.
첫 번째 과제는 다음을 포함하는 로봇용 기본 모델을 훈련할 때 데이터 부족 문제를 극복하는 것입니다.
1. 구조화되지 않은 게임 데이터와 레이블이 지정되지 않은 인간 비디오를 사용하여 로봇 학습 확장
2. 이미지 인페인팅(인페인팅)을 사용하여 데이터 향상
3. 3D 기본 모델 학습 시 3D 데이터 부족 문제 극복
4. 고충실도 시뮬레이션을 통해 합성 데이터 생성
5. VLM을 사용하여 데이터 향상 데이터 증강을 위해 VLM을 사용하는 것은 효과적인 방법입니다
6. 로봇의 물리적 능력은 기술의 분포에 의해 제한됩니다
두 번째 과제는 실시간 성능과 관련이 있으며 여기서 핵심은 기본 모델의 추론 시간입니다. .
세 번째 과제는 다중 모드 표현의 한계와 관련이 있습니다.
네 번째 과제는 인스턴스 수준 및 배포 수준과 같은 다양한 수준에서 불확실성을 정량화하는 방법이며 배포 변화를 보정하고 처리하는 방법에 대한 문제도 포함됩니다.
다섯 번째 과제는 배포 전 보안 테스트, 런타임 모니터링, 배포 중단 상황 감지 등을 포함한 보안 평가입니다.
여섯 번째 챌린지는 선택 방법에 관한 것입니다. 기존 기본 모델을 사용할 것인가 아니면 로봇을 위한 새로운 기본 모델을 구축할 것인가입니다.
일곱 번째 과제는 로봇 설정의 높은 가변성과 관련이 있습니다.
여덟 번째 과제는 로봇 설정에서 어떻게 벤치마킹하고 재현성을 보장할 것인가입니다.
자세한 연구 내용은 원문을 참고해주세요.
위 내용은 대형모델+로봇, 중국학자 다수 참여로 상세한 리뷰 리포트 공개의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



