

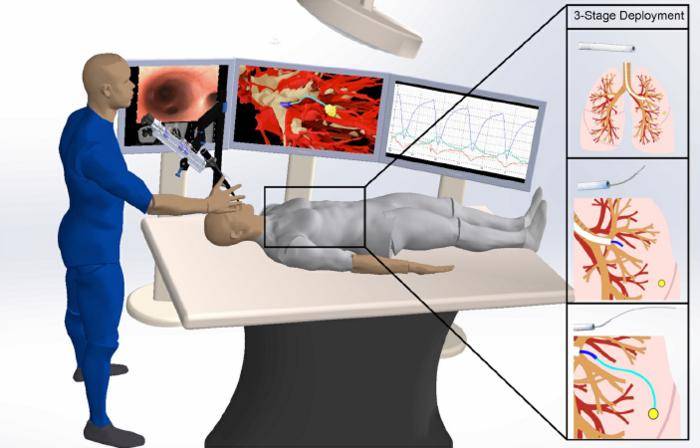
3단계 반자율 의료 로봇 폐. 이미지 출처: KUNTZ 외/노스캐롤라이나 대학교
일부 종양은 매우 작고 폐 조직 깊숙히 숨겨져 있어 의사가 접근하기 어렵습니다. 이 문제를 해결하기 위해 채플힐에 있는 노스캐롤라이나 대학교와 밴더빌트 대학교의 연구원들은 폐 조직을 통과할 수 있는 매우 유연하면서도 강력한 로봇을 연구해 왔습니다. 사이언스 로보틱스(Science Robotics) 저널에 발표된 최근 논문에서 그들은 새로운 로봇이 작은 기도나 혈관과 같은 살아있는 실험실 모델의 중요한 구조를 피하면서 "지점 A"에서 "지점 B"로 자율적으로 이동할 수 있음을 보여주었습니다.
연구원들은 이 기술이 로봇 기관지경술이 달성할 수 없는 목표를 달성할 수 있다고 지적합니다. 몇 센티미터 또는 심지어 밀리미터의 추가 거리를 제공할 수 있어 폐의 작은 표적을 추적하는 데 매우 유용합니다
로봇은 여러 개의 독립적인 구성 요소로 구성됩니다. 기계식 제어 어셈블리의 원리는 앞뒤로 제어된 추력을 제공하는 바늘을 활용하는 것이며 바늘 디자인은 곡선 경로를 따라 조종할 수 있도록 합니다. 바늘은 니켈-티타늄 합금으로 만들어졌으며 유연성을 높이기 위해 레이저로 에칭되어 조직을 통해 쉽게 이동할 수 있습니다.
바늘에 에칭 처리가 되어 있어 앞으로 나아갈 때 장애물을 피해 쉽게 이동할 수 있습니다. 카테터와 같은 기타 액세서리를 바늘과 함께 사용하여 폐 생검과 같은 절차를 수행할 수 있습니다.
조직을 관통하기 위해서는 바늘이 어디로 가는지 알아야 합니다. 연구팀은 피험자의 가슴 CT 스캔과 인공지능을 사용해 기도, 혈관, 선택된 표적을 포함한 폐의 3차원 모델을 만들었습니다. 이 3D 모델을 사용하여 바늘이 목표물에 설정되면 AI 기반 소프트웨어는 중요한 구조를 피하면서 자동으로 "A 지점"에서 "B 지점"으로 이동하도록 지시합니다.
자율주행차와 유사하지만 목적지에 도달할 때 중요한 혈관과 같은 장애물을 피하면서 폐 조직을 탐색할 수 있다고 연구진은 말합니다.
다시 작성해야 할 내용은 편집장의 선택과 수정
인체에서 일하는 로봇에 대해 이야기할 때 사람들은 항상 그것이 작고, 유연하고, 지능적이고, 유연하고, 강하기를 바랍니다. 이런 로봇이 인간의 손과 눈을 보조하고, 인간이 어려운 곳을 갈 수 있기를 바랍니다. 손을 뻗어 사람의 눈을 명확하게 볼 수 있습니다. 구별할 수 없는 병변입니다. 이번에 새로운 로봇이 탄생했습니다. 설정된 목적지에 도달할 수 있을 뿐만 아니라 작지만 중요한 구조물을 유연하게 피할 수도 있습니다. 아시다시피, 인체는 너무 복잡하고 목표를 달성하는 데에는 우회해야 할 작은 장애물이 많이 있습니다. 연구자들은 로봇이 앞뒤로 자유롭게 움직일 수 있도록 구조와 재료, 로봇의 이동 모드를 열심히 개발하고 질병 치료와 구조 작업을 원활하게 수행해야 합니다
(출처: 과학기술일보)
위 내용은 로봇은 작은 기도나 혈관과 같은 주요 구조를 피하면서 살아있는 폐 조직 내에서 '반자율 탐색'을 달성합니다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



