

종족 로봇 전문기업 림엑스다이나믹스(LimX Dynamics)가 첫 완전 자체 개발 제품 '사륜족 로봇 W1'을 공식 출시했다. 이 제품은 Zhuji Dynamics의 "Motion Intelligence"를 기반으로 개발되었으며, 다리와 바퀴 구조의 장점을 통합하여 세계 최고의 인식 및 모션 제어 알고리즘을 갖추고 있습니다. 동시에 자체 개발한 다양한 고성능 관절도 탑재해 강력한 실시간 지형 인식과 전 지형 이동 능력을 구현해 발 달린 로봇의 작동 능력을 크게 향상시킨다. Zhuji Dynamics Company는 이 4륜 로봇 W1을 통해 중국의 거대한 잠재 공백 시장을 목표로 삼았으며 산업 검사, 물류 및 유통, 특수 작업, 과학 연구 및 교육 등 B-end 고객에게 직접적인 영향을 미칠 수 있는 기회를 포착했습니다. 문제점 적용 경험. 주지다이나믹스 W1, 올해 4분기부터 사전예약 접수 시작

주지다이내믹스, 최초의 4륜 로봇 W1 출시
W1 4륜 로봇은 파괴적인 기술과 제품력 보유
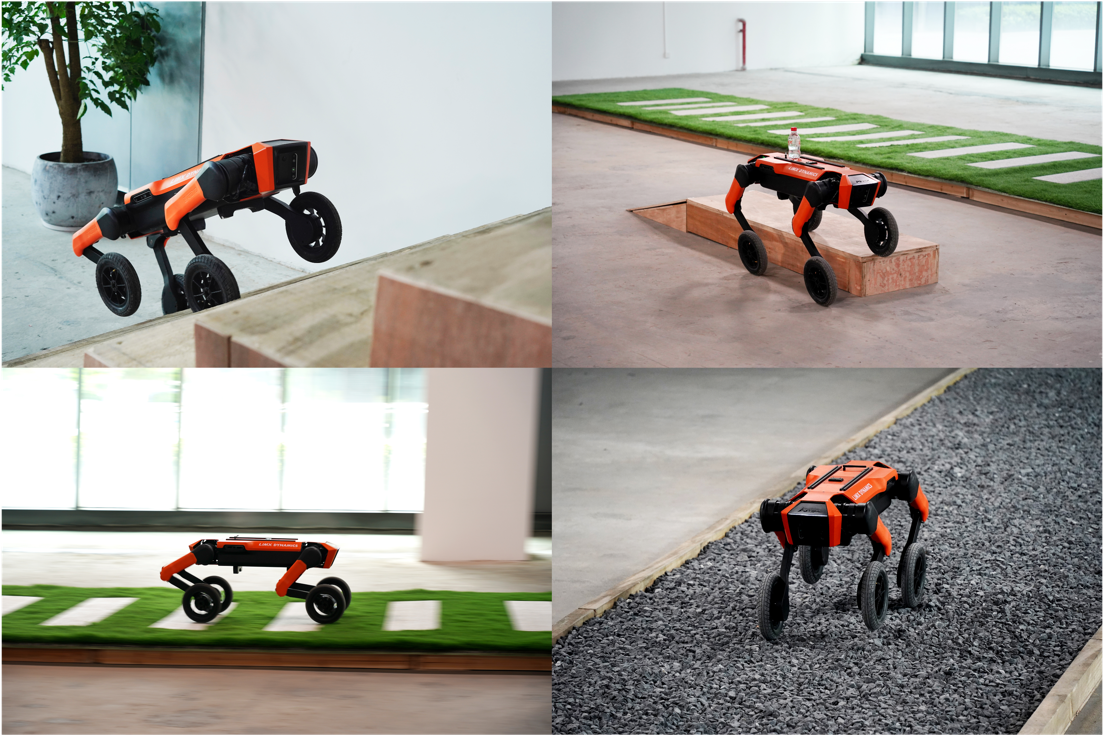
을 목표로 함 일반 목적 Zhuji Dynamics가 완전히 자체 개발한 고성능 관절인 발 달린 로봇을 통해 W1은 4개의 다리와 4개의 바퀴를 결합하는 복합 능력을 극대화하여 매우 역동적인 움직임과 모든 지형 장애물 극복 능력을 달성할 수 있습니다. 다리가 4개인 로봇. 보다 효율적이고 민첩하며 대부분의 실제 적용 시나리오에 더 적합합니다.
Zhuji Dynamics의 인식 기반 모션 제어와 같은 핵심 알고리즘을 갖춘 W1은 계단과 같은 매우 어려운 개별 지형을 성공적으로 정복했으며 바퀴가 없는 대부분의 복잡한 장면을 자율 지형 인식을 기반으로 처리할 수 있습니다. - 계단을 오르내리는 4륜 제품을 완성하기 위한 시간 보행 계획 및 제어.
자연스러운 형태의 장점과 일류 소프트웨어 및 하드웨어 기능 덕분에 W1은 뛰어난 모바일 효율성, 적재 용량 및 항속 범위를 갖추고 있어 고객의 실제 사용 요구 사항을 실제로 충족합니다.

W1은 뛰어난 이동 능력을 갖춘 4륜 로봇입니다
현재 Zhuji Dynamics 4륜 로봇 W1은 여러 복잡한 응용 시나리오의 성능 검증을 성공적으로 통과했으며 실제 응용을 위한 준비가 완벽하게 갖추어져 있습니다.
W1 4륜 로봇 여러 단지에서 성능 검증을 성공적으로 통과 응용 시나리오
4족 로봇은 4족 로봇과 거의 동일한 기능을 가져야 하지만 바퀴-발 하이브리드로 인해 발생하는 인식 간섭, 상태 추정 및 모션 제어 문제가 기하급수적으로 증가했습니다. 세상에 성숙한 솔루션은 없습니다. 그리고 그것은 매우 어렵습니다. 바퀴 달린 발의 복합 형태의 장점을 최대한 활용하려면 학계와 산업이 직면한 장기적인 문제를 해결해야 합니다.
Zhuji Dynamics는 지형 감지를 사용하여 발이 있는 로봇 모션 인텔리전스의 핵심 기술을 포괄적으로 마스터했습니다. 역학, 하이브리드 역학, 모델 예측 제어 및 기타 분야의 학술 및 R&D 경험을 바탕으로 더 높은 안정성과 더 강력한 실시간 제어 기능을 달성하기 위해 인식과 제어를 통합하는 선도적인 알고리즘 프레임워크를 구축했습니다. .
프로토타입에서 제품으로의 도약을 위해서는 로봇과 환경 간의 실시간 상호 작용을 잘 수행하는 것이 특히 중요합니다. Zhuji Dynamics는 처음부터 인식 기능과 모션 제어의 조합을 선택했습니다. 핵심 문제를 해결하기 위한 핵심 기술과 소프트웨어 알고리즘을 기반으로 정의된 하드웨어, 모두 자체 개발한 고성능 관절을 통해 4륜 로봇이 뛰어난 물리적 이동 능력을 최대한 발휘할 수 있습니다.
Zhuji Dynamics의 창업자인 Zhang Wei 박사는 "범용 보행 로봇은 기술 폭발적인 시대에 있습니다. 기초 연구와 상용화의 교차점이 나타나고 계속 확장되고 있습니다. 우리는 4륜 보행 로봇 W1을 선택했습니다. 첫 번째 주력 제품은 전 지형 이동성을 갖춘 효율적인 범용 섀시를 만드는 것입니다. 이는 기술, 응용 프로그램 및 시장의 차선책을 정립하는 쇄빙선 제품입니다. 해결하여 발 달린 로봇이 진정한 산업에 진출하고 가치를 창출할 수 있게 되었습니다.”
위 내용은 'Zhuji Dynamics'는 스포츠 인텔리전스를 사용하여 발 기반 제품의 구현 및 응용을 돌파하는 최초의 4륜 발 로봇을 출시했습니다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



