

지하를 자유롭게 왕복할 수 있는 로봇은 어떤 모습인가요?

잘못 놓아서 죄송하지만 실제로는 그게 전부입니다.

외관은 매끈하지도 부드럽지도 않지만 10센티미터가 넘는 모래 아래에서 '헤엄칠' 수 있는 최초의 기계라고 합니다.
두 팔이 매우 빠르게 움직였습니다.
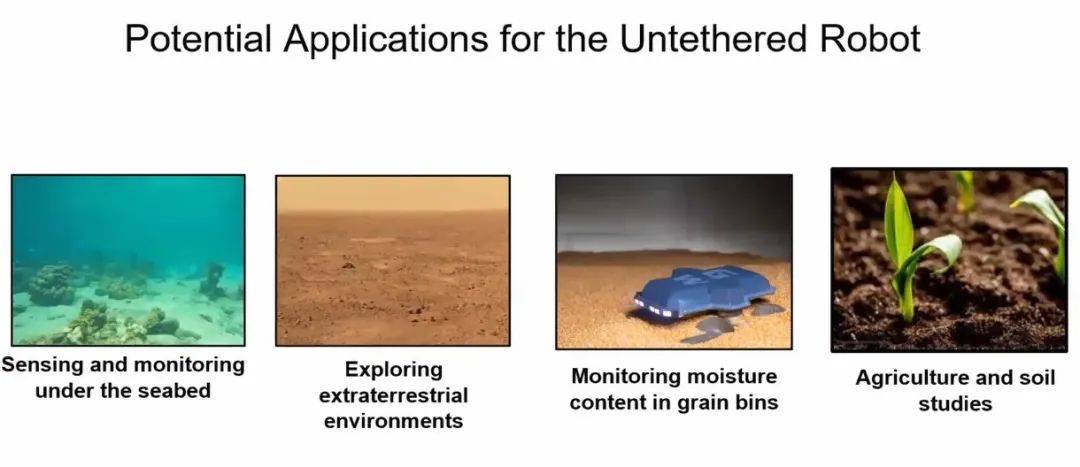
물론 '모래밭을 헤매다'는 단순히 실력을 뽐내기 위한 것이 아닙니다. 이 로봇은 WiFi를 통해 제어할 수 있으며 환경 모니터링, 곡물 창고 점검, 재난 대응 등의 분야에서 사용할 수 있습니다.

이것은 캘리포니아 대학교 샌디에고 캠퍼스의 로봇 전문가 팀이 수행한 수많은 실험의 결과이며, 지하 로봇 연구에 대한 새로운 아이디어를 열어줍니다.
▍모래 밑에서 "수영"하는 방법은 무엇인가요?
그렇다면 부드럽지도 매끄럽지도 않은 이 로봇은 어떻게 지하에서 헤엄칠 수 있을까요?
모래에서 수영하는 것은 땅이나 물 속에서 수영하는 것보다 저항력이 훨씬 크고, 그 과정에서 손상되기 매우 쉽다는 것을 꼭 아셔야 합니다. 이것이 로봇이 아래 환경을 결코 정복하지 못한 주된 이유 중 하나입니다.
이를 위해 연구자들은 자연의 생물에서 영감을 찾기 시작했습니다.

가장 먼저 떠오르는 것은 아기 거북이입니다. 아기 거북이는 땅에 묻힌 알에서 부화하면 강력한 발을 노처럼 사용하여 모래 위를 기어갑니다.
영감의 원천으로 로봇의 두 팔도 작은 바다거북의 커다란 오리발을 모방하고 있습니다.
로봇이 모래 아래로 이동할 때 수영 선수처럼 팔을 몸에 가깝게 앞으로 당겼다가 다시 옆으로 당깁니다
그러나 연구원들은 로봇이 계속해서 팔을 뒤집고 앞으로 나아갈 때 모래의 저항으로 인해 로봇이 자연스럽게 위쪽으로 이동하여 사용이 제한된다는 사실을 곧 발견했습니다.
그래서 그들은 "거북이"의 머리 디자인을 유연하게 변경하고 항력을 줄이기 위해 쐐기 모양의 머리로 설계했습니다
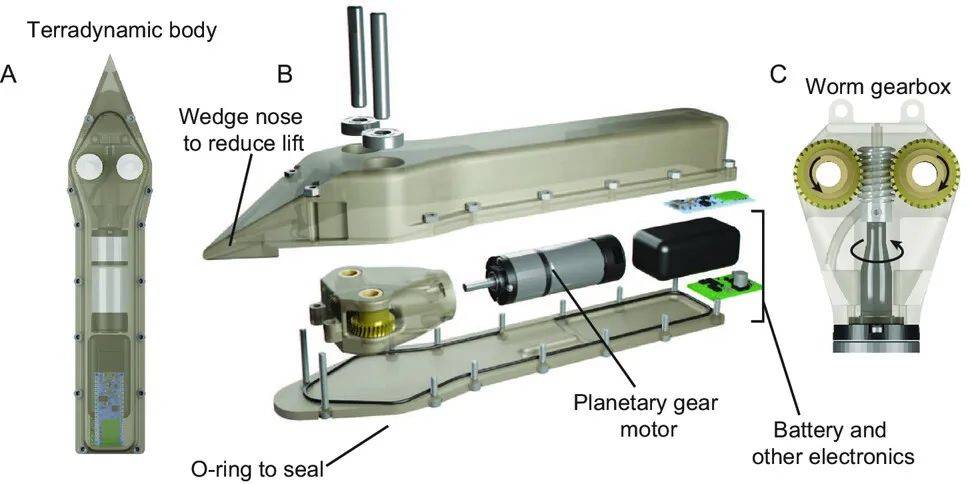
또한 로봇 코 양쪽에 "호일 같은 표면" 세트가 설치된 이 장치는 잠수함의 잠수 비행기처럼 작동하여 로봇을 아래쪽으로 밀어서 위쪽 궤적을 상쇄합니다.

전진 수평 이동을 유지하는 것 외에도 로봇은 모래 위에서 왼쪽이나 오른쪽으로 회전할 수도 있습니다. Wi-Fi를 통해 원격으로 제어하여 부착물의 추력을 독립적으로 변경하여 왼쪽이나 오른쪽으로 회전할 수 있습니다. 발판은 현재 고정 각도로 되어 있지만 향후 필요에 따라 로봇이 위아래로 움직일 수 있도록 조정될 수 있습니다.
▍장애물에 직면하면 어떻게 해야 하나요?
이사 문제는 해결됐는데, 장애물이 생기면 어떻게 해야 할까요?
실제로 로봇의 두 팔에는 수영 외에도 장애물을 감지하는 기능도 있습니다. 이동하는 동안 주변 유사의 저항이 증가하는 것을 감지하여 이를 수행합니다. 장애물을 감지하면 충돌을 피하거나 장애물을 회피하기 위해 적절한 조치를 취합니다.
그러나 현재는 로봇의 전면과 하단에 있는 장애물만 감지할 수 있습니다. "리틀 터틀"의 향후 버전은 더욱 강력한 장애물 감지 및 장애물 회피 기능을 갖추게 될 것입니다.
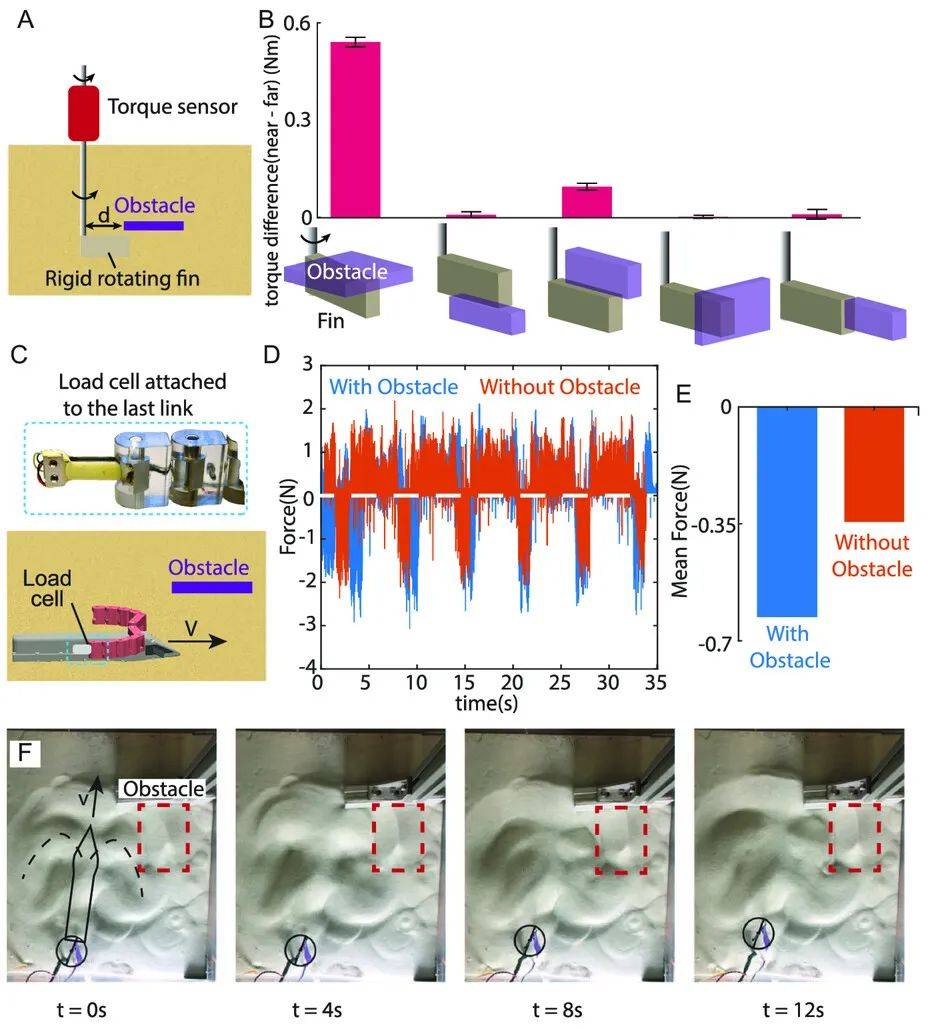
현재 '리틀 터틀' 로봇은 수심 12.7cm에서 시간당 약 4m의 속도로 모래 위에서 수평으로 이동할 수 있습니다. 그러나 그 속도는 벌레나 조개 등 다른 지하 동물의 이동 속도와 비슷하게 매우 느립니다.
비교적 느리긴 하지만 이 속도는 일부 작업, 특히 주변 환경이나 센서 장비의 손상을 방지하기 위해 조심스럽게 움직여야 하는 작업에는 충분할 수 있습니다.
이러한 로봇을 개발하는 것은 기계 설계, 센서 기술, 제어 시스템 및 소프트웨어 개발을 포함한 많은 기술적 과제에 직면합니다. 지속적인 기술의 발전으로 로봇이 다양하고 복잡한 환경에서 작업을 수행할 가능성은 계속 높아질 것입니다
▍속도를 더욱 향상시켜 향후 우주에서도 활용 가능
현재 사람들은 팔다리가 있는 로봇이 지하에서 어떻게 이동하는지 충분히 알지 못합니다. 이와 같은 소형 로봇은 지하 로봇 설계에 대한 새로운 아이디어를 제시할 뿐만 아니라 토양 샘플링 및 지하 탐사와 같은 다양한 시나리오에도 사용될 수 있습니다. , 수색 및 구조 작업 등
이 연구는 "Underactuated Appendages를 사용하여 세분화된 환경에서 로봇 감지 및 수영을 향한 로봇 감지 및 수영"이라는 제목으로 Advanced Intelligent Systems에 게재되었습니다.
로봇은 실험실의 모래가 채워진 탱크와 캘리포니아 라호야 해안 해변의 모래에서 테스트되었습니다. 앞으로 연구자들은 모래 위에서 수영하는 속도를 더욱 최적화하고 몸의 각도를 늘려서 지하에서 전, 후, 좌우, 상하로 만능 움직임을 달성할 수 있게 될 것입니다
미래에는 로봇의 응용이 우주 탐사의 새로운 길을 열어줄 수도 있습니다. 로봇은 우주에서 다양한 임무를 수행할 수 있을 뿐만 아니라 매질 속에서 스스로 움직이지 않을 수도 있기 때문이다. 이는 우주의 저중력 환경에서 의미가 있다. 따라서 로봇은 우주 응용 분야에서 엄청난 잠재력을 가지고 있습니다
위 내용은 캘리포니아 대학에서 개발된 거북이에서 영감을 받은 로봇이 미래의 우주 탐사에 사용될 수 있습니다.의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



