

이 글에서는 BEV Sketch 레이아웃을 통해 다시점 스트리트 뷰 이미지를 정확하게 생성하는 방법을 소개합니다

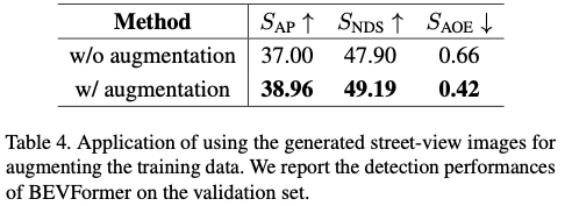
자율주행 분야에서 이미지 합성은 하류 인식 작업의 성능을 향상시키기 위해 널리 사용됩니다
현장에서 컴퓨터 비전의 인식 개선 모델 성능에 대한 오랜 연구 과제는 합성 이미지를 통해 달성됩니다. 비전 중심 자율주행 시스템에서는 멀티뷰 카메라를 사용하는 경우 일부 롱테일 장면을 절대 수집할 수 없기 때문에 이 문제가 더욱 두드러진다
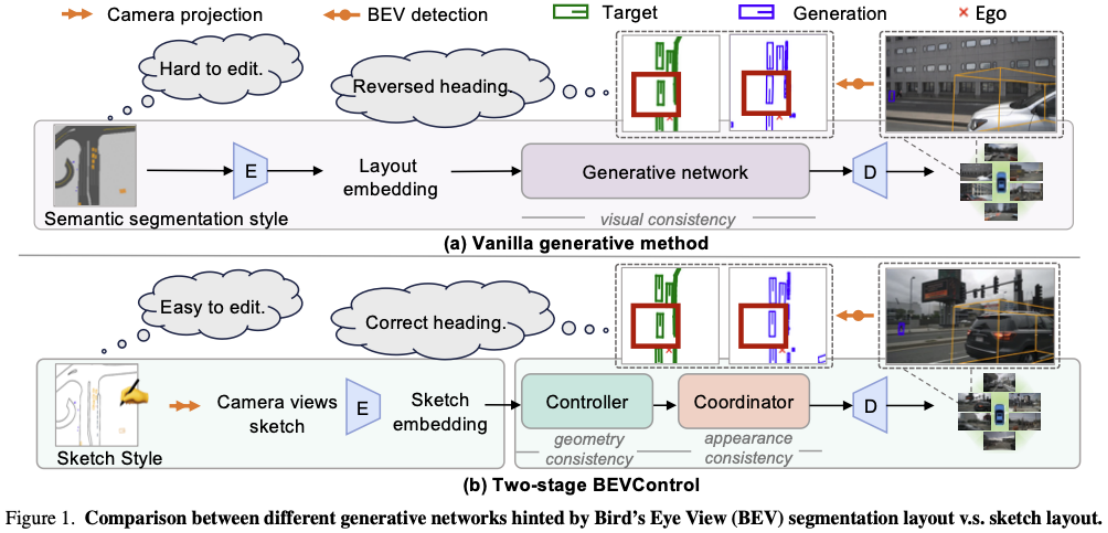
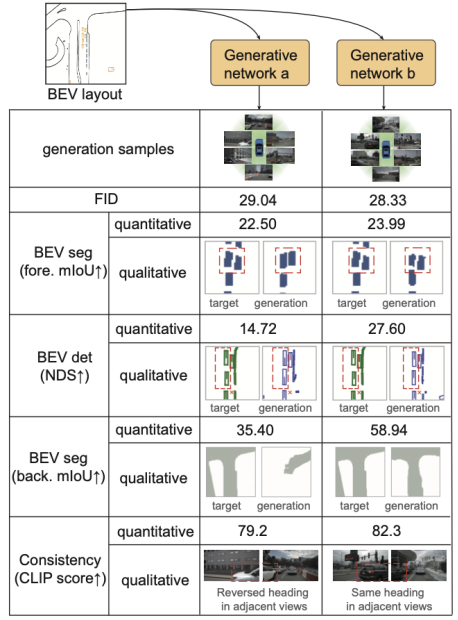
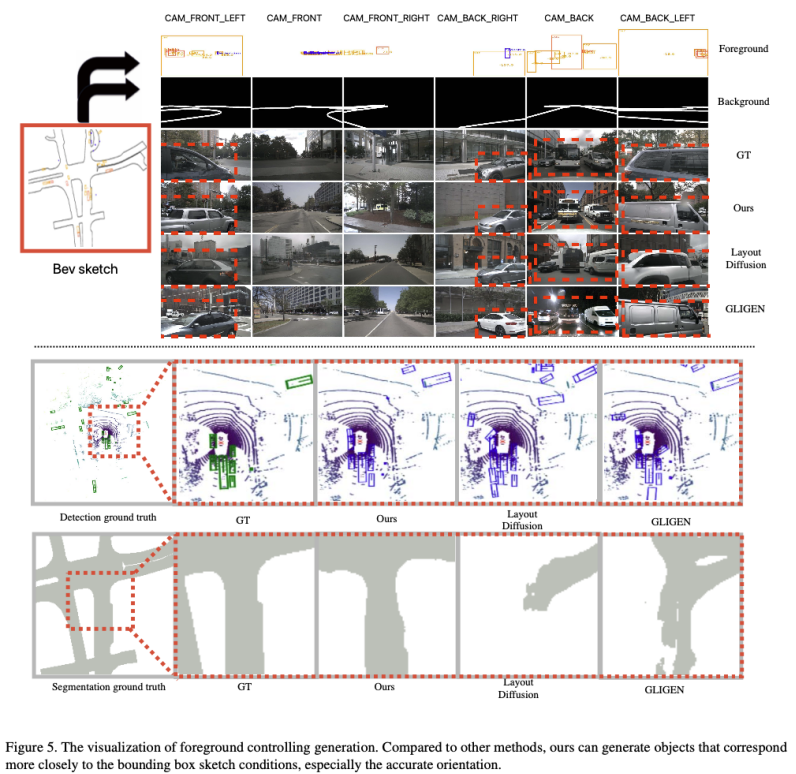
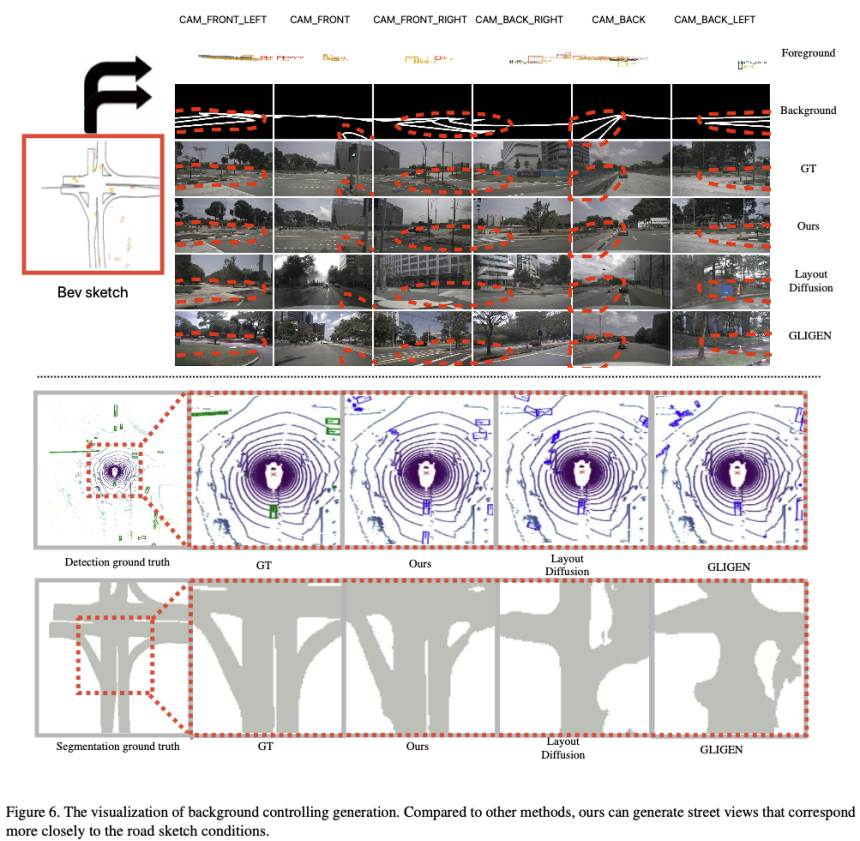
그림 1(a)와 같이 기존의 생성 방식은 의미론적 분할 스타일의 BEV 구조를 생성 네트워크로 변환하고 합리적인 다시점 이미지를 출력합니다. 장면 수준 지표로만 평가할 때 기존 방법은 사실적인 스트리트 뷰 이미지를 합성할 수 있는 것으로 보입니다. 그러나 확대한 후에는 정확한 개체 수준 세부 정보를 생성하지 못하는 것으로 나타났습니다. 그림에서 우리는 생성된 차량이 대상 3D 경계 상자와 비교하여 완전히 반대 방향으로 향하는 최첨단 생성 알고리즘의 일반적인 실수를 보여줍니다. 더욱이, 의미론적 분할 스타일의 BEV 구조를 편집하는 것은 어려운 작업이고 많은 인력이 필요합니다
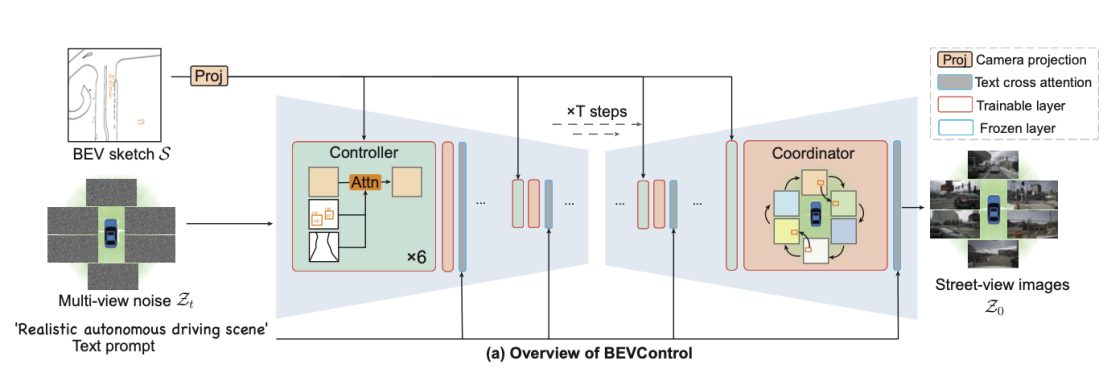
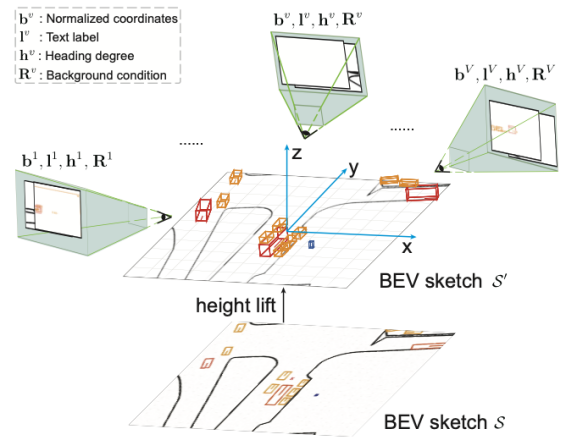
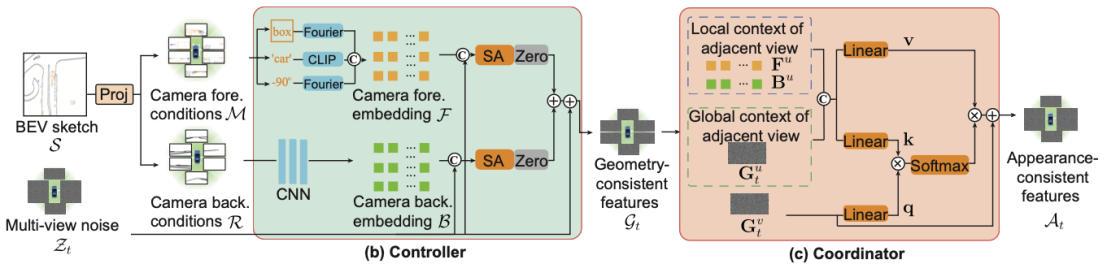
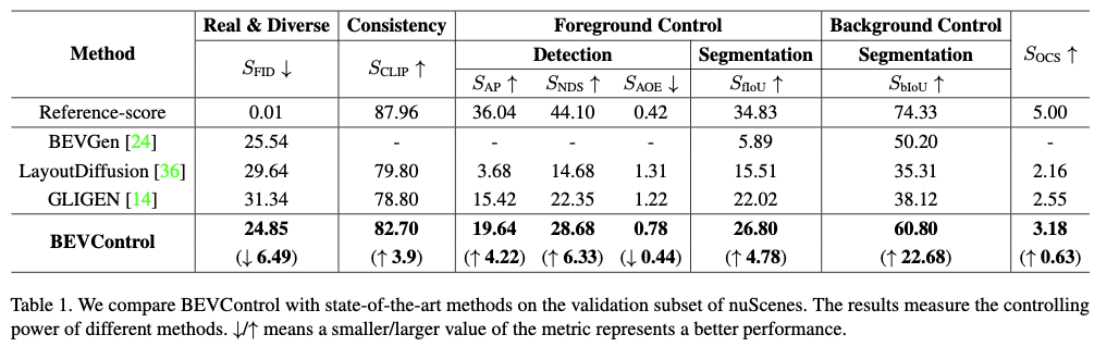
따라서 그림 1과 같이 보다 미세한 배경 및 전경 기하학적 제어를 제공하기 위해 BEVControl이라는 2단계 방법을 제안합니다. (비). BEVControl은 스케치 스타일의 BEV 구조 입력을 지원하므로 빠르고 쉽게 편집할 수 있습니다. 또한 BEVControl은 컨트롤러를 통한 거리 뷰와 조감도 간의 기하학적 일관성, 코디네이터를 통한 거리 뷰 간의 시각적 일관성

문서 링크: https:// m.sbmmt.com/link/1531beb762df4029513ebf9295e0d34f

다시 작성해야 하는 내용은 다음과 같습니다. References
다시 작성해야 하는 내용은 다음과 같습니다. [1] Swerdlow A, Xu R , Zhou B . 조감도 레이아웃에서 스트리트 뷰 이미지 생성[J] arXiv 사전 인쇄 arXiv:2301.04634, 2023.
위 내용은 더욱 세분화된 배경 및 전경 제어, 더욱 빠른 편집: BEVControl의 2단계 접근 방식의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



