


MPC 제어 알고리즘, 정식 명칭은 Model Predictive Control(모델 예측 제어)은 시스템 동적 모델을 기반으로 하는 제어 기술입니다. 이는 수학적 모델을 통해 시스템의 미래 동작을 예측하고 이러한 예측을 기반으로 시스템의 제어 입력을 최적화하여 원하는 출력을 달성하는 방식으로 작동합니다. MPC 제어 알고리즘의 핵심 아이디어는 각 제어주기에서 미래의 일정 기간에 대한 예측 결과를 최적화하여 최상의 제어 입력을 얻는 것입니다. 이 최적화는 원하는 출력을 달성하기 위해 시스템의 제어 입력을 최적화하는 일부 예측 결과를 기반으로 합니다. MPC 제어 알고리즘은 널리 사용되며 특히 일부 제약 조건을 충족해야 하는 제어 시스템에 적합합니다. 시스템 모델과 최적화 기술을 결합함으로써 MPC는 다양한 산업 분야에서 활용될 수 있습니다. MPC 제어 알고리즘의 핵심은 시스템의 현재 상태 정보를 기반으로 미래 시스템 상태를 예측할 수 있는 예측 모델에 있습니다. 예측 모델의 형태는 고정되어 있지 않으며 상태 공간 방정식, 전달 함수, 계단 응답 모델, 임펄스 응답 모델, 퍼지 모델 등이 될 수 있습니다. 구체적인 형태는 제어되는 객체와 예측해야 하는 상태에 따라 다릅니다.
TinyMPC는 볼록 모델 예측 제어에 맞춰진 오픈 소스 솔버로, 고속 계산을 제공합니다. TinyMPC는 종속성을 최소화하면서 C++로 구현되며 특히 자산이 제한된 플랫폼의 임베디드 제어 및 로봇 애플리케이션에 적합합니다. TinyMPC는 상태 및 입력 경계는 물론 2차 제약 조건도 처리할 수 있습니다. Python, Julia 및 MATLAB 인터페이스를 사용하여 임베디드 시스템용 코드를 생성할 수 있습니다.
Bot Demo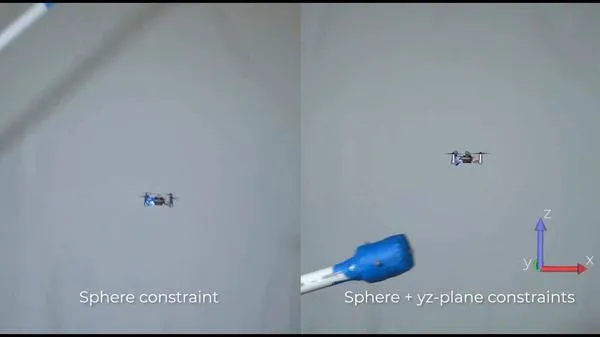
 TinyMPC는 이제 원뿔 제약 조건도 처리할 수 있습니다! (b)에서는 로켓 연착륙 문제에 대한 지원이 내장된 두 개의 기존 원뿔 솔버(SCS 및 ECOS)에 대해 TinyMPC를 벤치마킹합니다. TinyMPC는 SCS에서 13배, ECOS에서 137배의 평균 속도 향상을 달성합니다.
TinyMPC는 이제 원뿔 제약 조건도 처리할 수 있습니다! (b)에서는 로켓 연착륙 문제에 대한 지원이 내장된 두 개의 기존 원뿔 솔버(SCS 및 ECOS)에 대해 TinyMPC를 벤치마킹합니다. TinyMPC는 SCS에서 13배, ECOS에서 137배의 평균 속도 향상을 달성합니다.
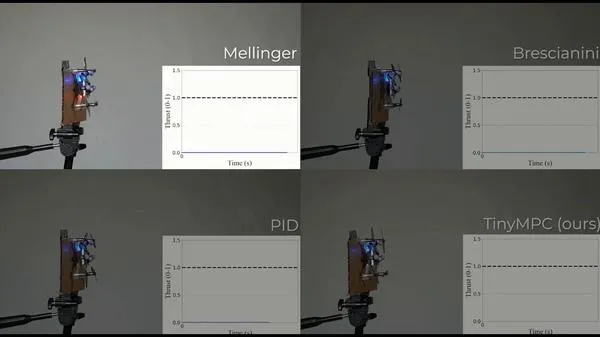
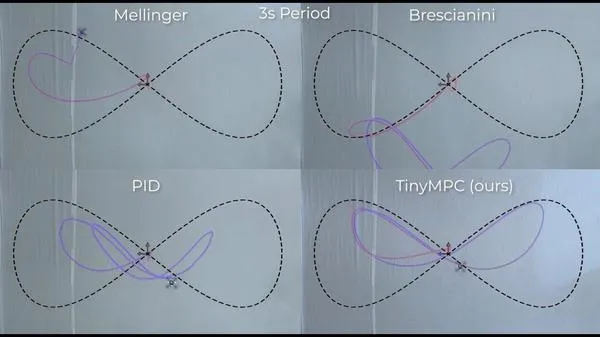
 실시간 제어에서는 솔버가 엄격한 시간 창 내에 솔루션을 반환해야 합니다. TinyMPC의 궤적 추적 성능은 로켓 연착륙 문제에 대해 SCS 및 ECOS의 궤적 추적 성능과 비교되었으며 각 솔루션에 사용 가능한 시간을 인위적으로 변경했습니다. TinyMPC는 모든 제어 기간에 걸쳐 SCS 및 ECOS보다 제약 조건 위반이 적고 추적 오류가 더 낮습니다.
실시간 제어에서는 솔버가 엄격한 시간 창 내에 솔루션을 반환해야 합니다. TinyMPC의 궤적 추적 성능은 로켓 연착륙 문제에 대해 SCS 및 ECOS의 궤적 추적 성능과 비교되었으며 각 솔루션에 사용 가능한 시간을 인위적으로 변경했습니다. TinyMPC는 모든 제어 기간에 걸쳐 SCS 및 ECOS보다 제약 조건 위반이 적고 추적 오류가 더 낮습니다.
 알고리즘 기여자:
알고리즘 기여자:
코드 획득 주소:
GitHub - TinyMPC/TinyMPC: 마이크로컨트롤러를 위한 모델 예측 제어
위 내용은 PID 및 Carnegie Mellon University보다 더 부드러운 제어 알고리즘의 상세 내용입니다. 자세한 내용은 PHP 중국어 웹사이트의 기타 관련 기사를 참조하세요!

















![[웹 프런트엔드] Node.js 빠른 시작](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



