


「3D 空間でのサンプリングに基づく計算集約型の SLAM タスクに必要なリアルタイム機能」を暗黙的に表現するには、次のことが必要です。 NeRFベースのSLAM方式に基づいています。 3DGS は、その高速なレンダリング速度と優れたビジュアル品質で際立っています。 3DGS は明確で解釈可能な表現として、シーンの編集をシンプルにし、多数の下流タスクの実行を容易にします。
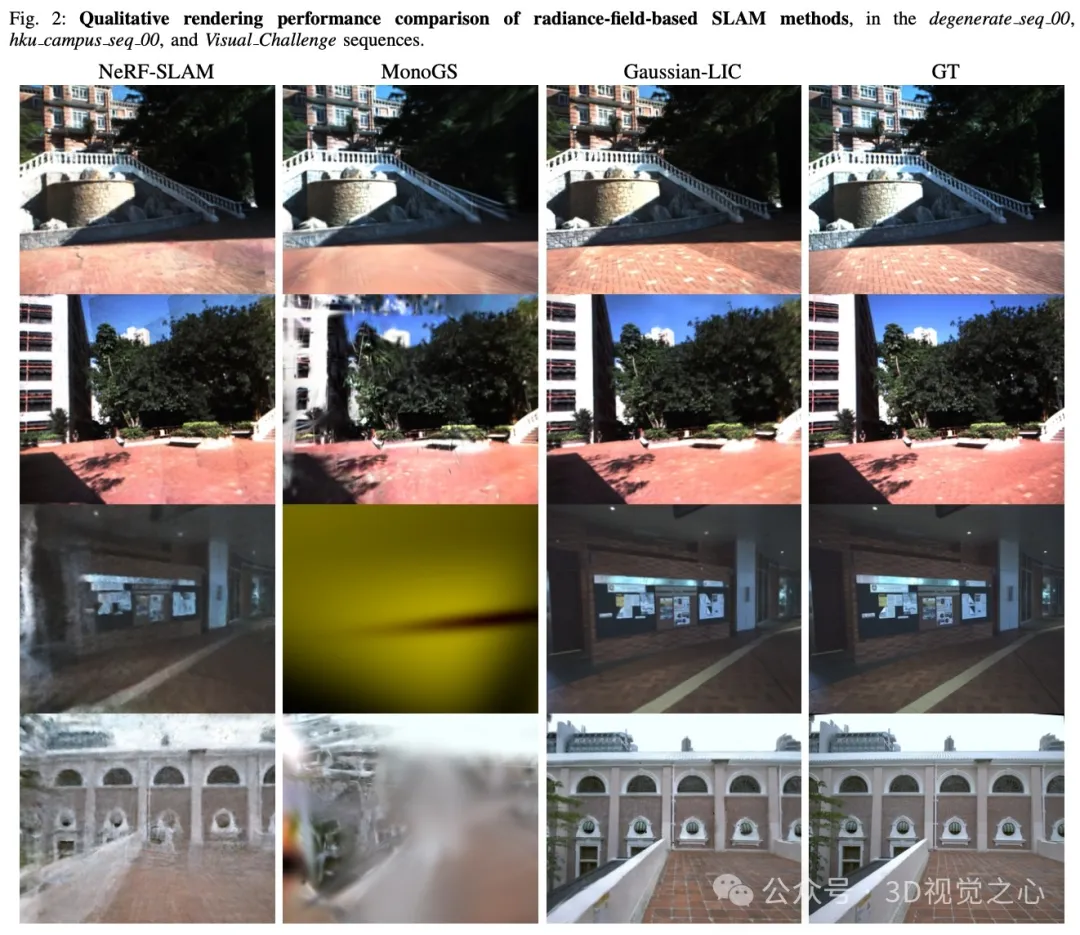
既存の放射線場ベースの SLAM システムは、主に 明るい小規模屋内環境 でテストされ、シーケンシャル RGB-D または RGB 入力を使用して満足のいく結果が得られます。これらの方法を、困難な照明条件、乱雑な背景、非常に動的な自己の動きなど、制御されていない困難な大規模な屋外シーンに拡張すると、問題が発生します。
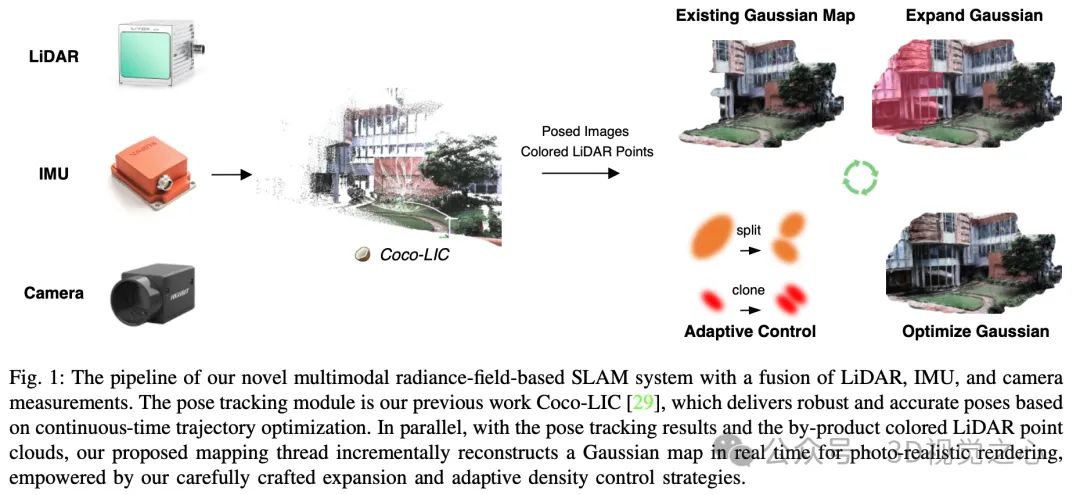
3D LIDAR、IMU、カメラ (ALIC と呼ばれる) を含む複数のセンサーからのデータを融合することで、制御されていない屋外シーンで Gaussian-LIC を使用する
図 1 に示すのは、LIC-SLAM システム プロセスです。
シーンを異方性 3D ガウス コレクション、各ガウスの分散として表現します。

3D ガウスを画像平面に投影して 2D ガウス分布を取得します。
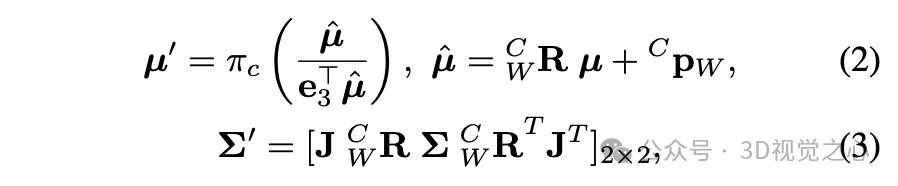
投影によって取得された 2D ガウスが渡されます。重み付け方程式は、不透明度を介してピクセルに影響します。

輪郭画像をレンダリングして、ピクセルにガウス マップからの十分な情報が含まれているかどうかを判断します。

走行距離計は、追跡フロントエンドとして以前の作品 Coco-LIC を採用しており、連続時間密結合 LiDAR 慣性カメラ測距システムです。 Gaussian-LIC は、3 つの相補的なセンサーを統合することにより、強力でリアルタイムかつ高精度の姿勢推定を実現し、SLAM システム全体の動作を容易にします。
最新の LIDAR 慣性カメラ データ (この記事では 0.1 秒) が蓄積されるたびに、その時間間隔内の軌道はファクター グラフに基づいて効率的に最適化されます。
時間間隔では、最新の画像のみを使用して最適化します。 。
Gaussian-LIC は、0.1 メートルの解像度でボクセルに保存されたグローバル LIDAR マップを維持します。現在の時間間隔内の軌道を最適化した後、効率を向上させるために、その期間内の LIDAR ポイントの 4 分の 1 のみがワールド座標に変換され、ボクセルに追加され、各ボクセル内の LIDAR ポイントの数が確実にそれらの間の距離になります。冗長性を減らすために、0.05 メートルより大きくする必要があります。正常にアタッチされた LIDAR ポイントについては、それらを最新の画像に投影し、ピクセル値をクエリして色付けします。その後、それらは、フレームとみなされる、推定されたカメラ ポーズの最新の画像とともにマッピング スレッドに送信されます。
推定されたカメラの姿勢、歪みのない画像、色付きの LIDAR ポイントなどの継続的な入力により、マッピング モジュールが徐々に構築され、主にガウス マップの最適化が行われます。 4 つのステップに分かれています:
 #
#


##要約とディスカッション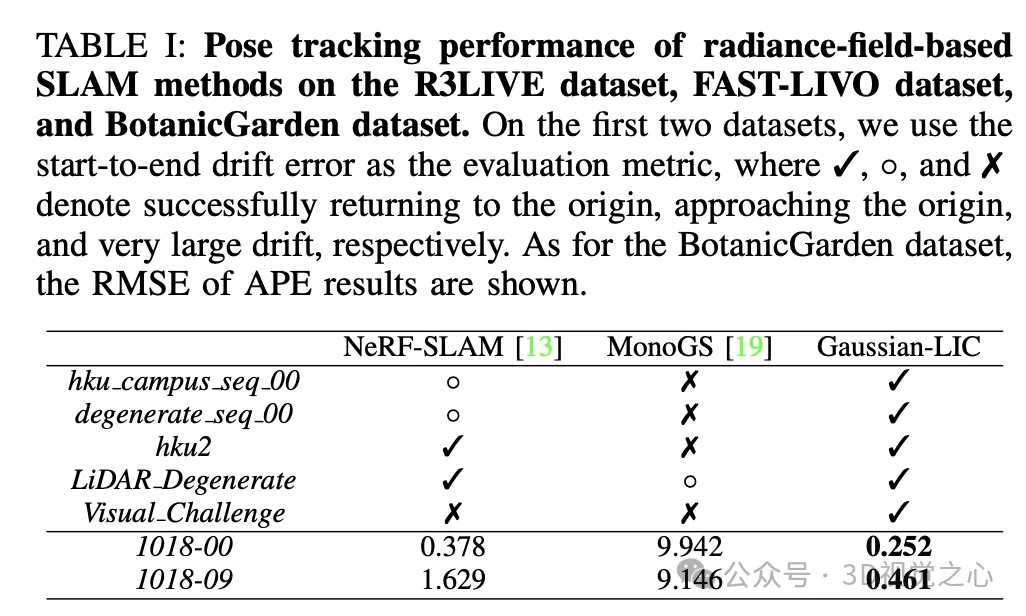
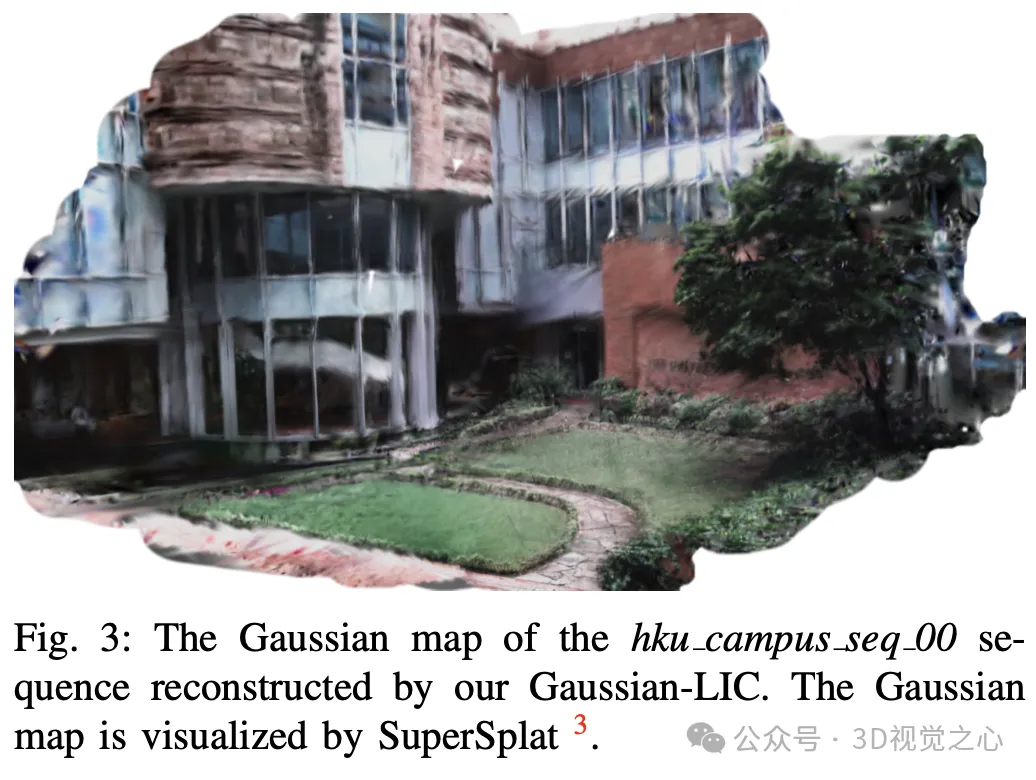
Gaussian-LIC は、新しい LiDAR 慣性カメラ放射場 SLAM システムです。高精度のトラッキングと 3D ガウス スプラッターによるリアルなオンライン再構成の 2 つの機能を備えています。効率的な LiDAR 慣性カメラ オドメトリによって生成された世界座標内のシェーディングされた LiDAR ポイントは、屋内および屋外シーンでの一般化が大幅に改善されたガウス マップの増分構築を支援するための良好な事前分布として使用されます。 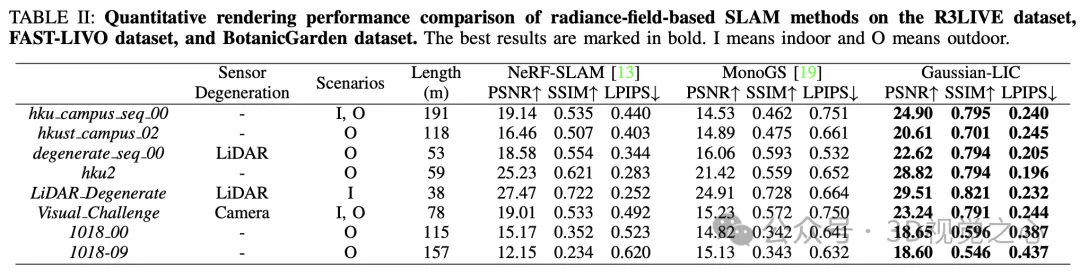
 さまざまな LIDAR をサポートしていますが、現在はソリッドステート LIDAR のみを使用しようとしています。
さまざまな LIDAR をサポートしていますが、現在はソリッドステート LIDAR のみを使用しようとしています。
カメラの自動露出とモーション ブラーは、リアルなマップの視覚的な品質に影響します。 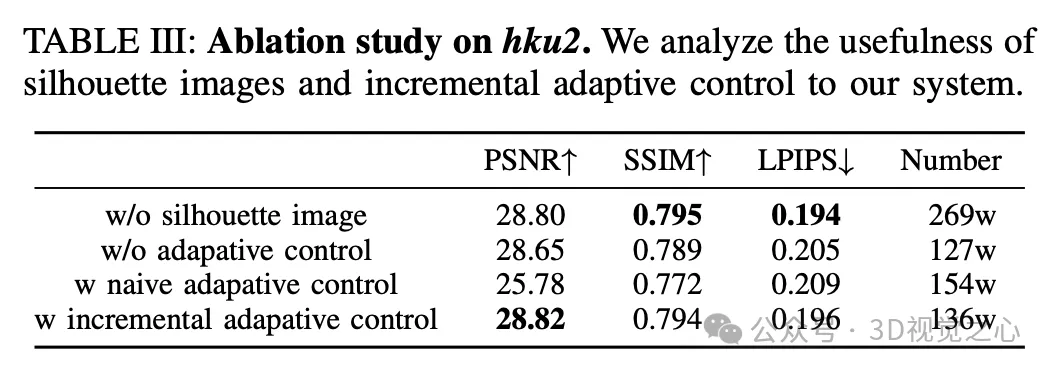
以上がGaussian-LIC: 初のマルチセンサー融合 3DGS-SLAM システム (浙江大学 & TUM)の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



