


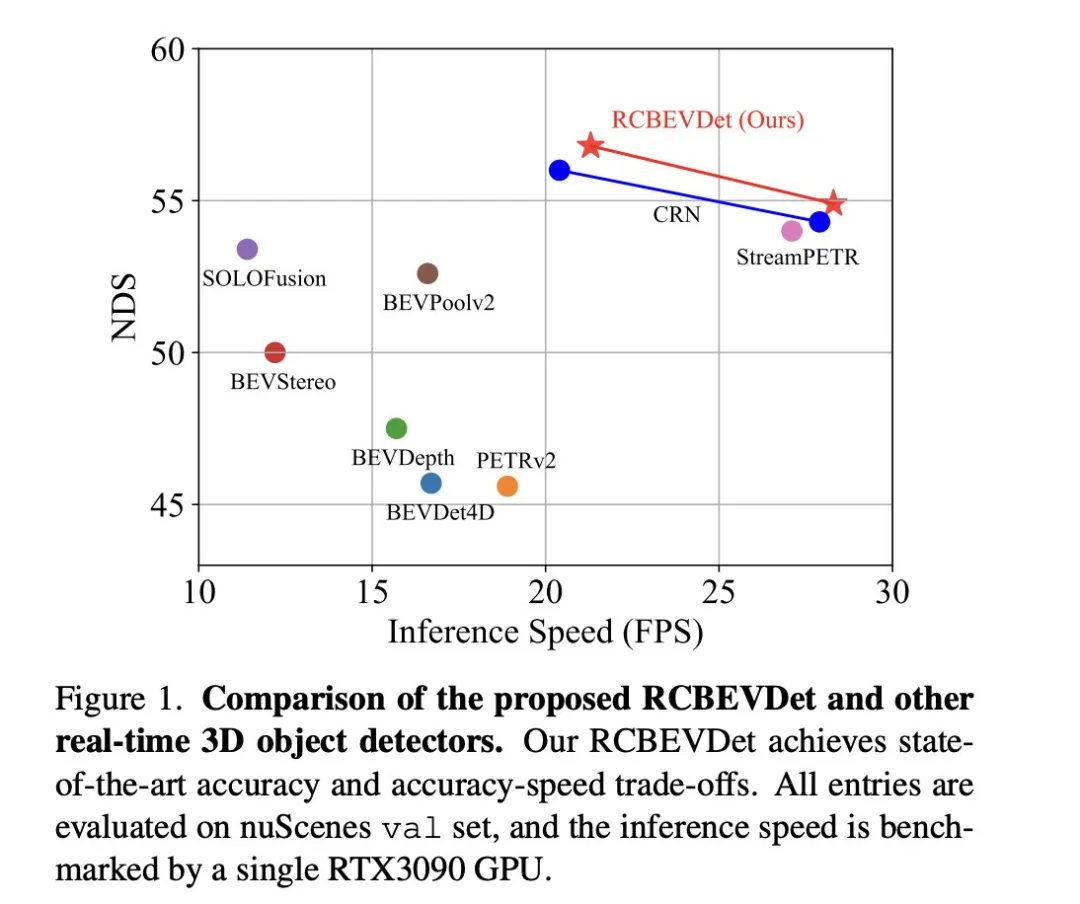
このディスカッション ペーパーで焦点を当てている主な問題は、自動運転のプロセスにおける 3D ターゲット検出技術の応用です。環境ビジョンカメラ技術の開発により、3D オブジェクト検出のための高解像度のセマンティック情報が提供されますが、この方法は、深度情報を正確にキャプチャできないことや、悪天候や低照度条件でのパフォーマンスの低下などの問題によって制限されます。この問題に対応して、議論ではサラウンドビューカメラと経済的なミリ波レーダーセンサーを組み合わせた新しいマルチモード3D目標検出方法RCBEVDetが提案されました。この方法は、複数のセンサーからの情報を総合的に使用することで、より豊富なセマンティック情報を提供し、悪天候や低照度条件でのパフォーマンスの低下などの問題の解決策を提供します。この問題に対応して、議論ではサラウンドビューカメラと経済的なミリ波レーダーセンサーを組み合わせた新しいマルチモード3D目標検出方法RCBEVDetが提案されました。 RCBEVDet は、マルチモード センサーからの情報を包括的に使用することで、高解像度のセマンティック情報を提供し、悪天候や低照度条件下でも優れたパフォーマンスを発揮することができます。自動
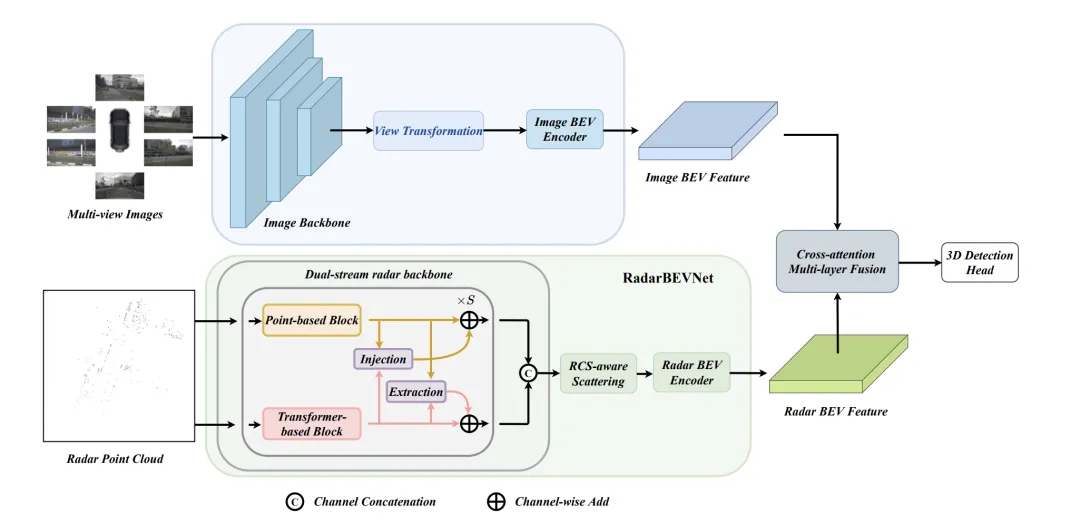
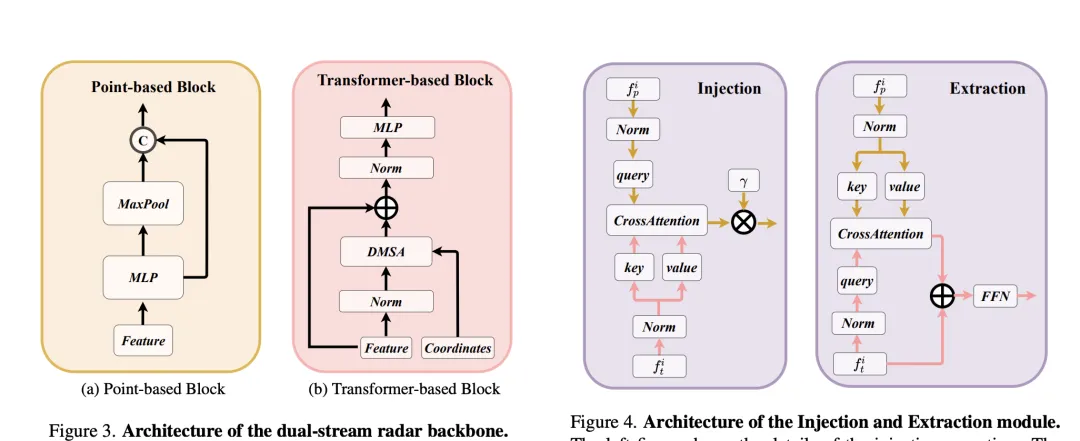
RCBEVDet を改善するこの方法の中核は、RadarBEVNet とクロスアテンション マルチレイヤー フュージョン モジュール (CAMF) という 2 つの主要な設計にあります。 RadarBEVNet は、レーダーの特徴を効率的に抽出するように設計されており、デュアルストリーム レーダー バックボーン ネットワーク RCS (レーダー クロス セクション) 対応 BEV (Bird's Eye View) エンコーダーが含まれています。このような設計では、点群ベースおよび変圧器ベースのエンコーダを使用して、レーダー ポイントを処理し、レーダー ポイントの特徴を対話的に更新し、レーダー固有の RCS 特性をターゲット サイズの事前情報として使用して、BEV 空間内のポイント フィーチャの分布を最適化します。 CAMF モジュールは、マルチモーダル クロス アテンション メカニズムを通じてレーダー ポイントの方位誤差問題を解決し、レーダーとカメラの BEV 特徴マップの動的位置合わせと、チャネルと空間融合によるマルチモーダル特徴の適応融合を実現します。 実装では、BEV 空間内の点特徴分布は、レーダー ポイント特徴を対話的に更新し、レーダー固有の RCS 特性をターゲット サイズの事前情報として使用することによって最適化されます。 CAMF モジュールは、マルチモーダル クロス アテンション メカニズムを通じてレーダー ポイントの方位誤差問題を解決し、レーダーとカメラの BEV 特徴マップの動的位置合わせと、チャネルと空間融合によるマルチモーダル特徴の適応融合を実現します。
この論文で提案されている新しい方法は、次の点を通じて既存の問題を解決します。
この論文の主な貢献は次のとおりです:
#デュアルストリーム レーダー バックボーン
従来のレーダー BEV エンコーダによって生成される BEV 特徴のスパース性問題を解決するために、RCS 対応 BEV エンコーダが提案されています。ターゲット サイズの事前情報として RCS を利用し、レーダー ポイントの特徴を単一ピクセルではなく BEV 空間内の複数のピクセルに分散して、BEV 特徴の密度を高めます。このプロセスは、次の式によって実装されます。
ここで、 は RCS に基づくガウス BEV 重みマップであり、すべてのレーダー ポイントの重みマップを最大化することによって最適化されます。最後に、RCS 拡散によって取得された特徴は MLP によって接続および処理され、最終的な RCS 対応 BEV 特徴が取得されます。
全体として、RadarBEVNet は、デュアルストリーム レーダー バックボーン ネットワークと RCS 対応 BEV エンコーダーを組み合わせることでレーダー データの特徴を効率的に抽出し、ターゲットのアプリオリとして RCS を使用することで BEV 空間の特徴分布を最適化します。サイズ。これは、その後のマルチモーダル融合のための強力な基盤を提供します。
クロスアテンション マルチレイヤー フュージョン モジュール (CAMF) は、高度なマルチモーダル機能の動的な位置合わせと融合のためのネットワーク構造。特にレーダーとカメラによって生成される鳥瞰図 (BEV) 機能の動的な位置合わせと融合のために設計されています。このモジュールは、主にレーダー点群の方位誤差によって引き起こされるフィーチャの位置ずれの問題を解決し、変形可能なクロスアテンション メカニズム (Deformable Cross-Attention) を通じて、レーダー ポイントの小さな偏差を効果的に捕捉し、標準的なクロスアテンションを削減します。計算の複雑さ。
CAMF は、変形したクロスアテンション メカニズムを利用して、カメラとレーダーの BEV 機能を調整します。カメラとレーダーの BEV 特徴の合計が与えられると、学習可能な位置埋め込みが最初に合計に追加され、次にキーと値としてクエリおよび参照ポイントに変換されます。マルチヘッド変形クロス アテンションの計算は次のように表すことができます。
ここで、 はアテンション ヘッドのインデックス、 はサンプリング キーのインデックス、 はサンプリング キーの総数です。サンプリング オフセットを表し、 と によって計算されるアテンション ウェイトです。
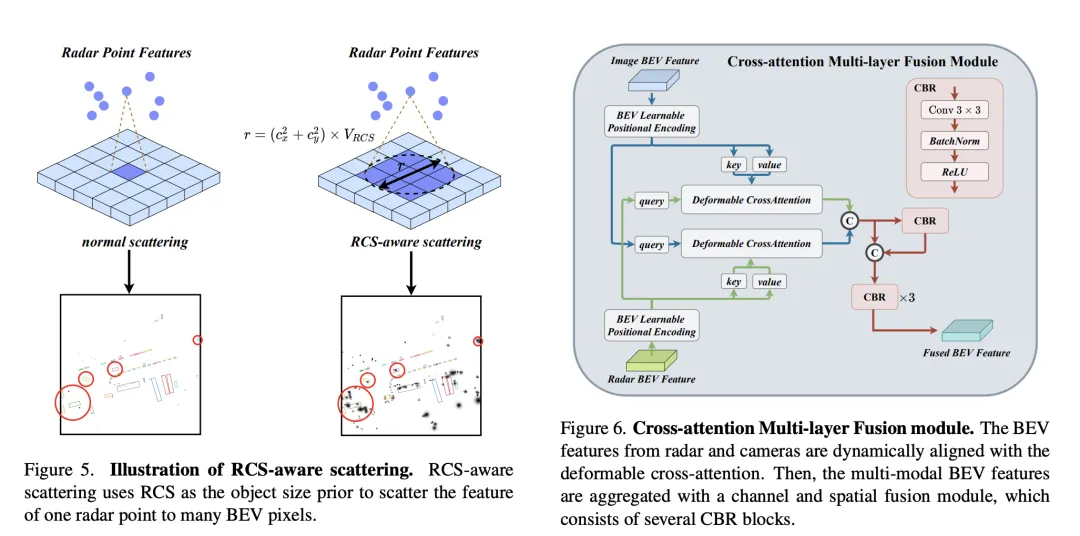
クロスアテンションを通じてカメラとレーダーの BEV 機能を調整した後、CAMF はチャネルおよび空間融合レイヤーを使用してマルチモーダル BEV 機能を集約します。具体的には、2 つの BEV 特徴が最初に連結され、次に CBR (畳み込みバッチ正規化活性化機能) ブロックに入力され、残りの接続を通じて融合された特徴が取得されます。 CBR ブロックは、畳み込み層、バッチ正規化層、ReLU 活性化関数から順に構成されます。その後、3 つの CBR ブロックが連続して適用され、マルチモーダル機能がさらに融合されます。
上記のプロセスを通じて、CAMF は正確な位置合わせとレーダーとカメラの BEV 機能の効率的な融合を効果的に実現し、3D ターゲット検出のための豊富で正確な機能情報を提供し、検出パフォーマンスを向上させます。
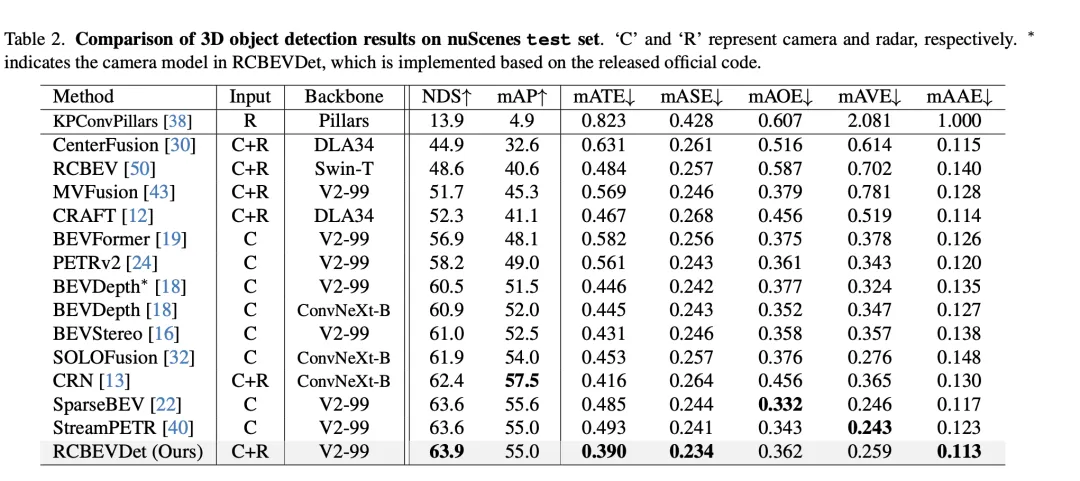
VoD 検証セットでの 3D ターゲット検出結果の比較では、RadarBEVNet がカメラとレーダーのデータを融合し、注釈領域全体および対象領域内の平均精度 (mAP) パフォーマンスの点で優れたパフォーマンスを示します。具体的には、注釈付きエリア全体で、RadarBEVNet は自動車、歩行者、自転車の検出においてそれぞれ 40.63%、38.86%、70.48% の AP 値を達成し、総合的な mAP は 49.99% に増加しました。対象領域、つまり車両に近い走行チャネルでは、RadarBEVNet のパフォーマンスはさらに優れており、車、歩行者、車両の検出において AP 値が 72.48%、49.89%、87.01% に達しました。それぞれサイクリストを対象とし、総合的な mAP は 69.80% に達しました。
これらの結果から、いくつかの重要な点が明らかになりました。まず、RadarBEVNet は、カメラとレーダーの入力を効果的に融合することで、2 つのセンサーの相補的な利点を最大限に活用し、全体的な検出パフォーマンスを向上させることができます。 PointPillar や RadarPillarNet などのレーダーのみを使用する方法と比較して、RadarBEVNet は包括的な mAP が大幅に向上しています。これは、マルチモーダル融合が検出精度を向上させるために特に重要であることを示しています。第 2 に、RadarBEVNet は関心のある領域で特に優れたパフォーマンスを発揮します。これは、関心のある領域内のターゲットが通常、リアルタイムの運転決定に最大の影響を与えるため、自動運転アプリケーションにとって特に重要です。最後に、RadarBEVNet の AP 値は、自動車や歩行者の検出において一部のシングルモーダルまたは他のマルチモーダル手法よりわずかに低いものの、自転車検出と包括的な mAP パフォーマンスにおいて、RadarBEVNet の全体的なパフォーマンス上の利点が示されています。 RadarBEVNet は、カメラとレーダーからのマルチモーダル データを融合することにより、VoD 検証セットで優れたパフォーマンスを実現し、特に自動運転にとって重要な関心領域での強力な検出機能を実証し、3D オブジェクト検出方法の可能性としての有効性を証明しています。
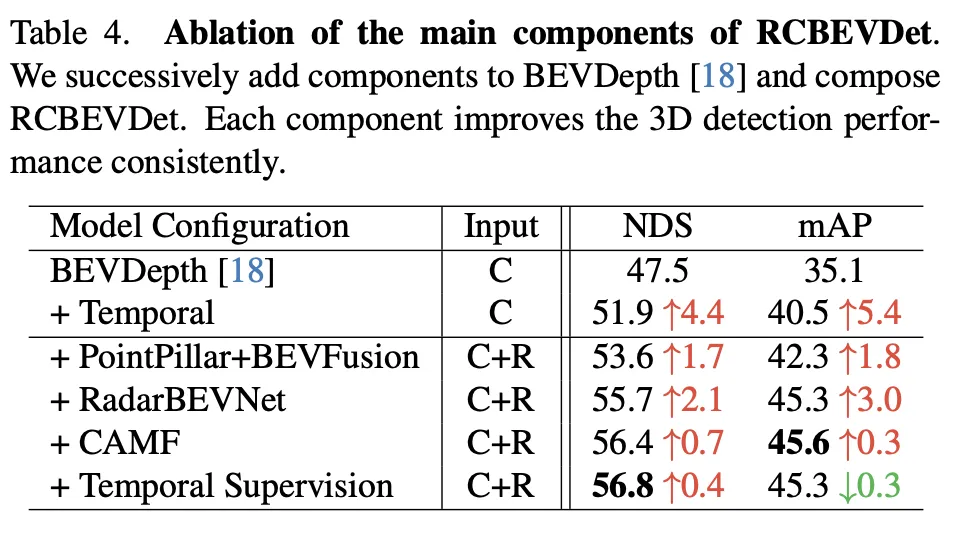
このアブレーション実験は、RadarBEVNet が主要コンポーネントを段階的に追加することで 3D オブジェクト検出パフォーマンスが継続的に向上していることを示しています。ベースライン モデル BEVDepth から始まり、各ステップで追加されたコンポーネントにより、NDS (検出精度と完全性を反映するコア メトリック) と mAP (オブジェクトを検出するモデルの能力を反映する平均精度) が大幅に向上します。
全体として、この一連のアブレーション実験は、時間情報の導入から複雑なマルチモダリティ Fusion 戦略に至るまで、RadarBEVNet の各主要コンポーネントが 3D 物体検出パフォーマンスの向上に貢献していることを明確に示しており、各ステップがもたらす効果は次のとおりです。モデルのパフォーマンスが向上します。特に、レーダーとカメラのデータの高度な処理と融合戦略は、複雑な自動運転環境におけるマルチモーダル データ処理の重要性を証明しています。
この論文で提案されている RadarBEVNet 手法は、カメラとレーダーからのマルチモーダル データを融合することにより、3D ターゲット検出の精度とロバスト性を効果的に向上させます。複雑な自動運転シナリオにも適しています。 RadarBEVNet とクロスアテンション多層融合モジュール (CAMF) を導入することにより、RadarBEVNet はレーダー データの特徴抽出プロセスを最適化するだけでなく、レーダー データとカメラ データの間の正確な特徴位置合わせと融合を実現し、単一のデータを使用する際の問題を克服します。センサーデータの制限(レーダー方位エラーや、低照度または悪天候時のカメラの性能低下など)。
利点の観点から見ると、RadarBEVNet の主な貢献は、マルチモーダル データ間の補完情報を効果的に処理して利用し、検出精度とシステムの堅牢性を向上させる能力です。 RadarBEVNet の導入によりレーダー データの処理がより効率的になり、CAMF モジュールにより異なるセンサー データが効果的に融合され、それぞれの欠点が補われます。さらに、RadarBEVNet は、実験で複数のデータセット、特に自動運転において重要な関心領域で優れたパフォーマンスを実証し、実用的なアプリケーションシナリオでの可能性を示しました。
欠点としては、RadarBEVNet はマルチモーダル 3D ターゲット検出の分野で目覚ましい成果を上げていますが、それに応じて実装の複雑さも増し、より多くのコンピューティング リソースと処理時間が必要になる可能性があります。リアルタイム アプリケーション シナリオでの展開がある程度制限されます。さらに、RadarBEVNet は自転車検出と全体的なパフォーマンスでは優れていますが、特定のカテゴリ (自動車や歩行者など) でのパフォーマンスにはまだ改善の余地があり、これを解決するにはさらなるアルゴリズムの最適化やより効率的な機能融合戦略が必要になる可能性があります。
つまり、RadarBEVNet は、革新的なマルチモーダル フュージョン戦略を通じて、3D ターゲット検出の分野でパフォーマンスに大きな利点があることを実証しました。計算の複雑さの高さや特定の検出カテゴリでのパフォーマンス向上の余地など、いくつかの制限はありますが、自動運転システムの精度と堅牢性を向上させる可能性は無視できません。今後の作業は、実際の自動運転アプリケーションにおける RadarBEVNet の広範な展開を促進するために、アルゴリズムの計算効率を最適化し、さまざまなターゲット検出におけるパフォーマンスをさらに向上させることに焦点を当てることができます。
この論文では、カメラとレーダーのデータを融合することにより、RadarBEVNet とクロスアテンション多層融合モジュール (CAMF) を紹介し、3D ターゲット検出の分野で重要な結果を示しています。特に自動運転の主要なシナリオにおけるパフォーマンスが向上しました。マルチモーダルデータ間の補完情報を効果的に利用して、検出精度とシステムの堅牢性を向上させます。計算の複雑さが高く、一部のカテゴリーではパフォーマンス向上の余地があるという課題にもかかわらず、私たちの技術は、自動運転技術の開発促進、特に自動運転システムの知覚能力の向上において大きな可能性と価値を示しています。今後の作業は、アルゴリズムの効率を最適化し、リアルタイム自動運転アプリケーションのニーズによりよく適応するために検出パフォーマンスをさらに向上させることに重点を置くことができます。
以上がRVフュージョンのパフォーマンスがすごい! RCBEVDet: レーダーにも春、最新の SOTA があります!の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



