


2024 年 1 月 2 日の Yingwei.com のレポートによると、XR ヘッドセットの視線追跡技術は急速に開発されています。この技術は、ユーザーの目の方向と目から反射された赤外線信号を分析することにより、目の動きを追跡し、ユーザーの視線の方向を特定することができます。たとえば、一般的な技術は、ヘッドマウント ディスプレイに 1 つまたは複数の赤外光源を取り付けて、さまざまな方向からユーザーの目に向かって赤外光を放射することです。センサーはユーザーの目から反射された赤外光(フリッカー)を検出し、ユーザーの目のXYZ位置と視線方向を決定するために使用されます。
赤外線視線追跡システムの精度と処理能力を向上させるには、通常、ユーザーの目の周りにいくつかの異なる赤外線光源を配置する必要があります。これらの光源は、角膜にさまざまなちらつき効果を生み出します。これらのちらつき効果を分析することにより、システムはユーザーの目の動きをより正確に追跡できます。この方法により、システムの追跡精度が向上し、より複雑な目の動きの動作を処理できるようになります。
残念ながら、従来の XR システムでは、測位に赤外線光源を使用する場合、いくつかの制限があります。通常、従来のシステムでは、ディスプレイ レンズとスクリーンが取り付けられているヘッドセットまたはその他の構造の端に赤外線光源が配置されます。ただし、この周辺位置が常に最適なオプションであるとは限らないため、光源を追加するか、より大型で強力な光源を使用する必要があります。光源をユーザーの目の虹彩の近くまたはより適切な位置に配置できれば、追加の光源は必要ありません。
複合現実環境におけるユーザーの視点からの視覚障害の問題を解決するために、XR システムは、赤外線光源をディスプレイの端から離れて目の近くに配置するという新しい方法を試みました。ユーザーの視野の中に。しかし、赤外光源のサイズは通常、直径/幅が 1.0 mm ~ 4.0 mm の範囲にあり、ユーザーの視野内で非常に目立つため、この既存のシステムには問題があります。したがって、ユーザーの視野角への影響を軽減するために、ほとんどの従来のシステムは、レンズ/ディスプレイの周縁部の次善の位置に赤外光源を配置するだけでした。
この問題に対応して、Microsoft は解決策を提供する「視線追跡用の Microled ベースの不可視照明」と呼ばれる特許出願を提出しました。 Microsoft によれば、この発明により、複合現実環境に対するユーザーの認識を妨げることなく、ヘッドマウント ディスプレイのレンズの表示領域で最適な方向に赤外光源を直接照射できるようになります。このソリューションは、ユーザーの目/虹彩と対応するカメラ センサーの位置を特定して、視線追跡技術を強化することもできます。
同社は、100μm未満の赤外μLED光源を使用して照明レンズ構造を作成する方法を提案しました。このμLEDはヘッドセットのレンズに埋め込まれており、その存在はユーザーには見えません。したがって、使用中に、このμLED は複合現実環境の表示にいかなる障害や干渉も引き起こしません。
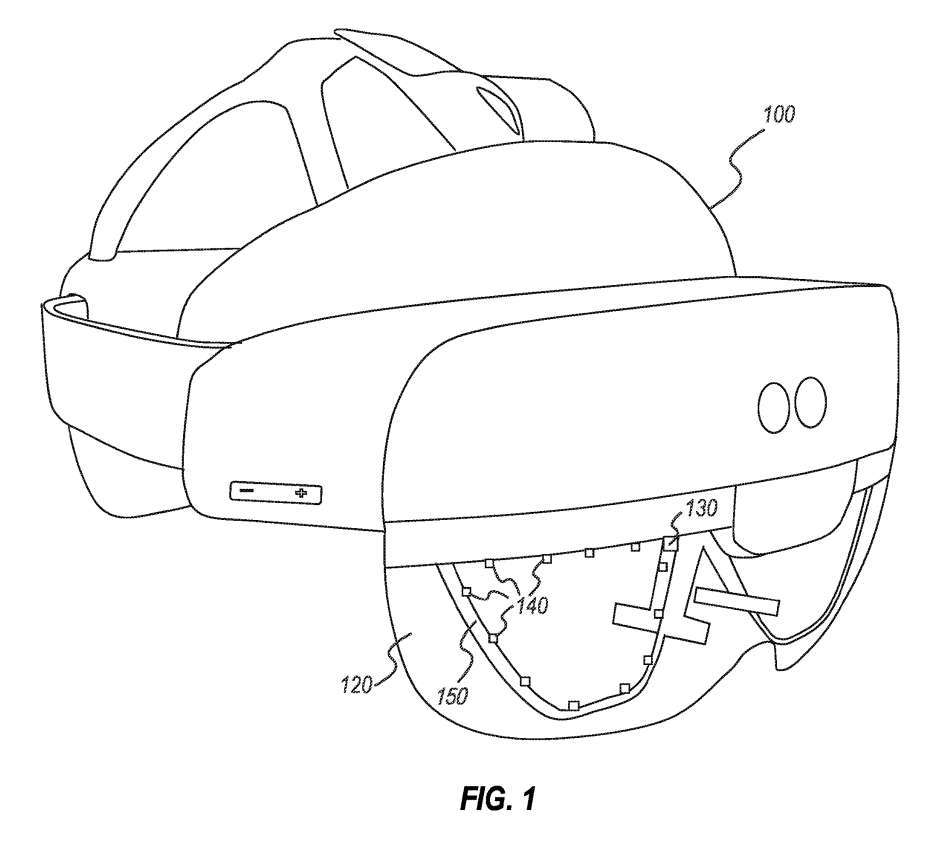
さて、図1に注目してみましょう。ヘッドマウントデバイスの構成は、視線追跡のために光の反射を捕捉するカメラ130または他のセンサーに基づいています。使用中、光源はユーザーの目の周りでフラッシュ光を放射します。光が放射されると、ユーザーの目 (特に虹彩) から反射され、カメラによって検出されます。
光源に対する光の強さとタイミングを感知することにより、ヘッドセットの光処理モジュールはユーザーの目と虹彩の位置と方向を正確に検出できます。
システムは、カメラ/センサーでキャプチャされた画像に追加の処理を実行することで、ユーザーの瞳孔と虹彩を区別できます。この処理された画像は、システムがユーザーの目の位置、投影されたホログラムまたは他のオブジェクトに対するユーザーの目の方向と視線を決定するのに役立ちます。ユーザーの目の位置情報を使用して、システムは必要な場所に位置を決めてホログラムを再投影し、複合現実環境のプレゼンテーションをサポートすることもできます。
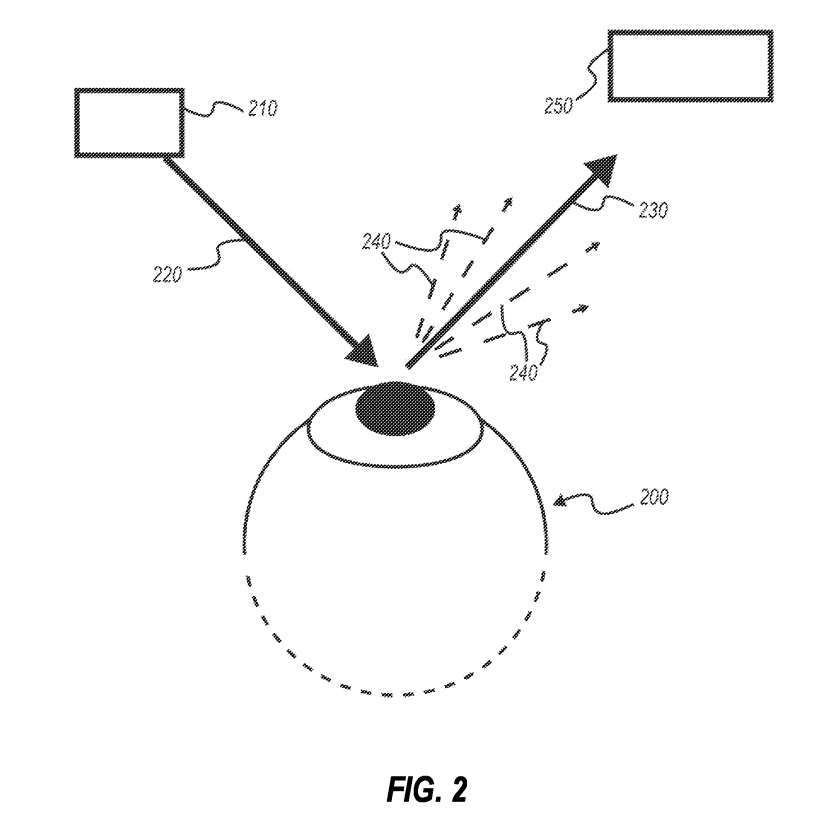
システムは、光源の位置、光源が光を発する時間、カメラの位置、および検出された光の反射の測定された強度と時間を介して、ユーザーの目/虹彩の相対的な位置を決定できます。ユーザーの目。これは、光がユーザーの目のさまざまな部分で異なる反射をするためです。たとえば、角膜の瞳孔および虹彩領域では強膜とは異なる反射をします。この違いの検出と測定は、反射が鏡面反射であるか拡散反射であるかに基づいています。
光源をユーザーの角膜の近くなどに最適に配置するには、光源を適切な位置に配置する必要があります。残念ながら、従来の赤外光源は大きすぎて (たとえば 1 ~ 4 mm)、レンズを通したユーザーの環境の視界を妨げずにユーザーの視野内に配置することができません。
これらの問題を解決するために、マイクロソフトは赤外線 μLED で構成された照明レンズの使用を提案しています。この構成により、ヘッドセット取り付け構造の物理的形状因子によって課される既存の制限を考慮する必要がなく、光源をユーザーの目の近くに最適に配置することができます。
赤外線μLEDの発光波長は790μm~1mmです。好ましい実施形態では、赤外線μLEDは、約800~900μmの波長で光を放射し、さらに好ましくは約850μmの波長で光を放射する。
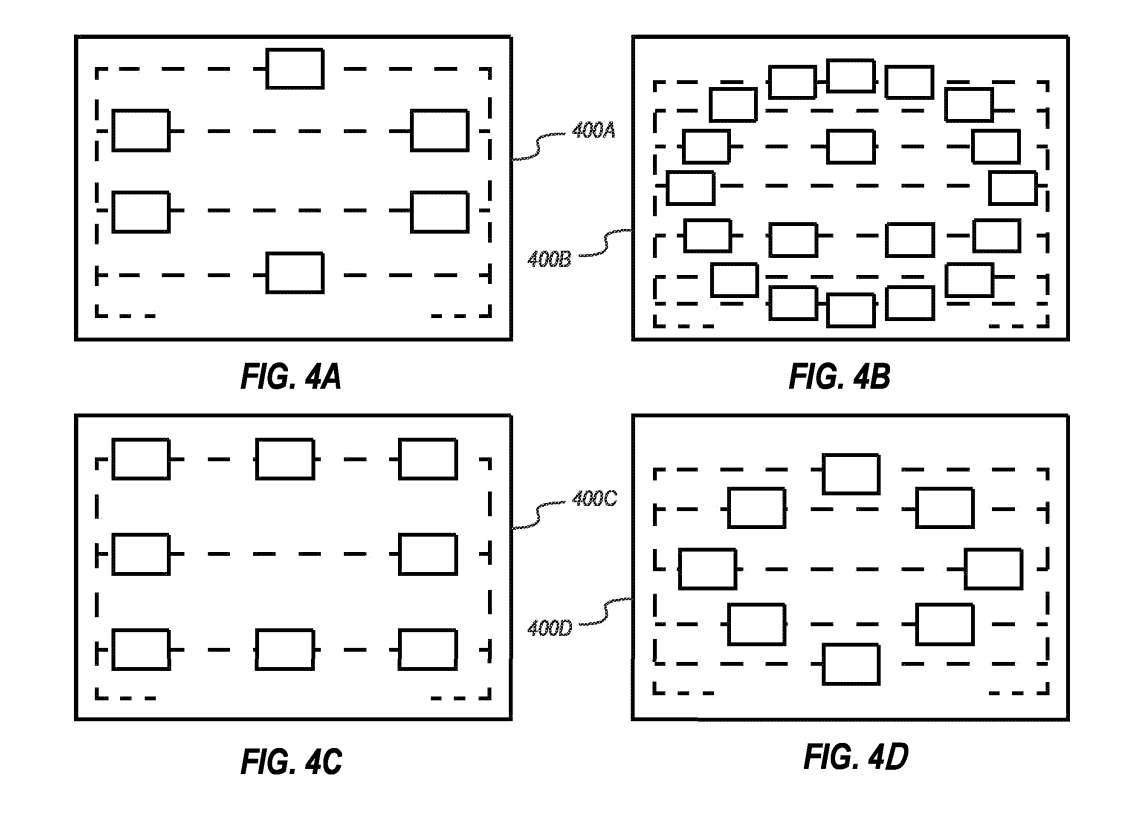
### さらに、照明レンズ構造400Aは6つの赤外線uLEDで構成され、照明レンズ構造400Cおよび400Dはそれぞれ8つの赤外線uLEDで構成される。照明レンズ構造400Bは、19個の赤外線uLEDを含む。
さまざまなニーズや好みに合わせて、赤外線 uLED のさまざまな量やパターンを変更できます。
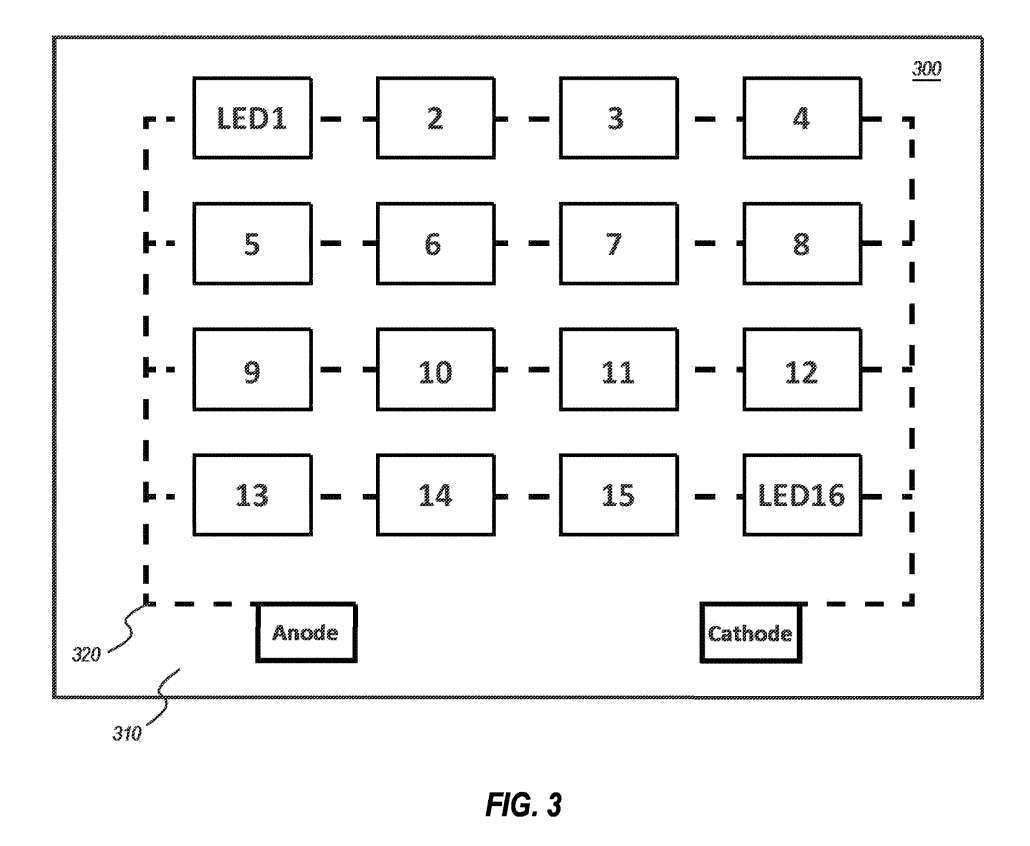
#### 図5では、ヘッドディスプレイ500は透明な照明レンズ構造510で構成され、レンズ構造510は複数の赤外線μLED540を有する。図に示すように、赤外μLED540は、各目およびレンズ領域に8個ずつ、円形に分布している。異なるIR μLED 540を選択して、単一の回路または2つ以上の異なる回路に接続することができる。回路を形成する電気配線は示されていません。 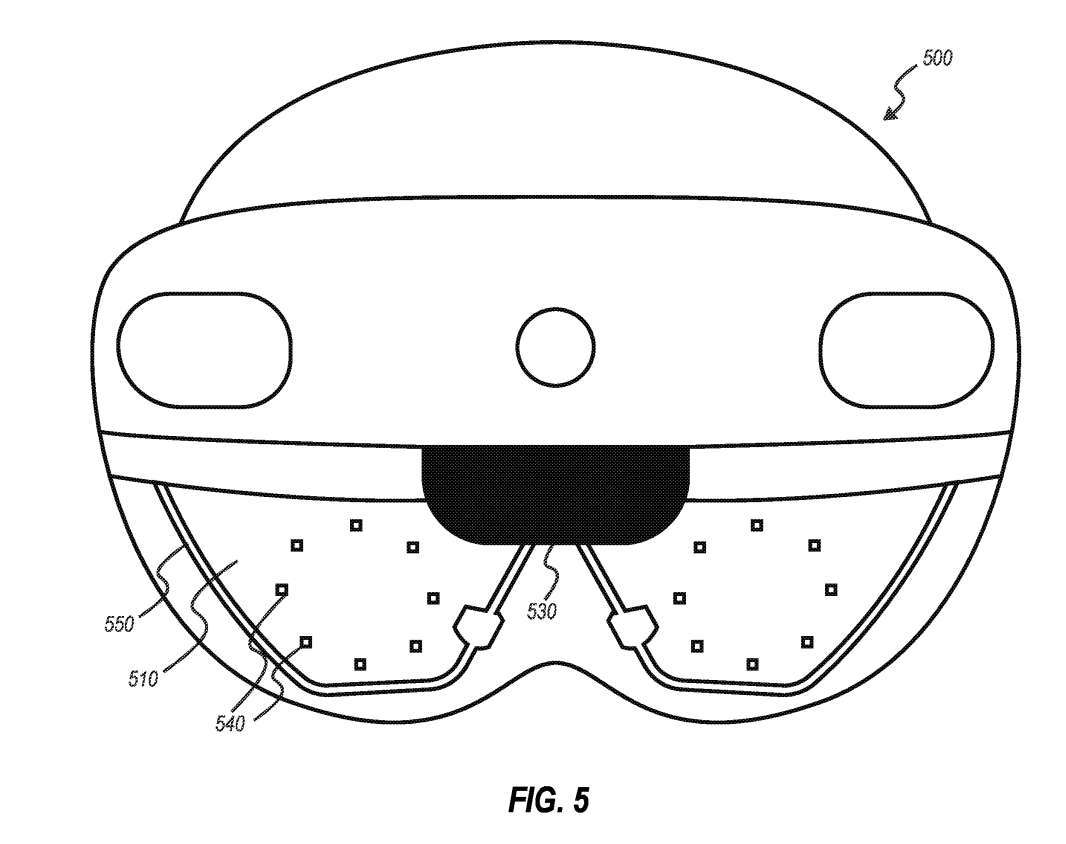
### 図6は、4つの赤外uLEDを含む第1の透明照明レンズ構造610と、8つの赤外uLEDを含む第2の透明照明レンズ構造620とを有する眼鏡600の実施形態を示す。
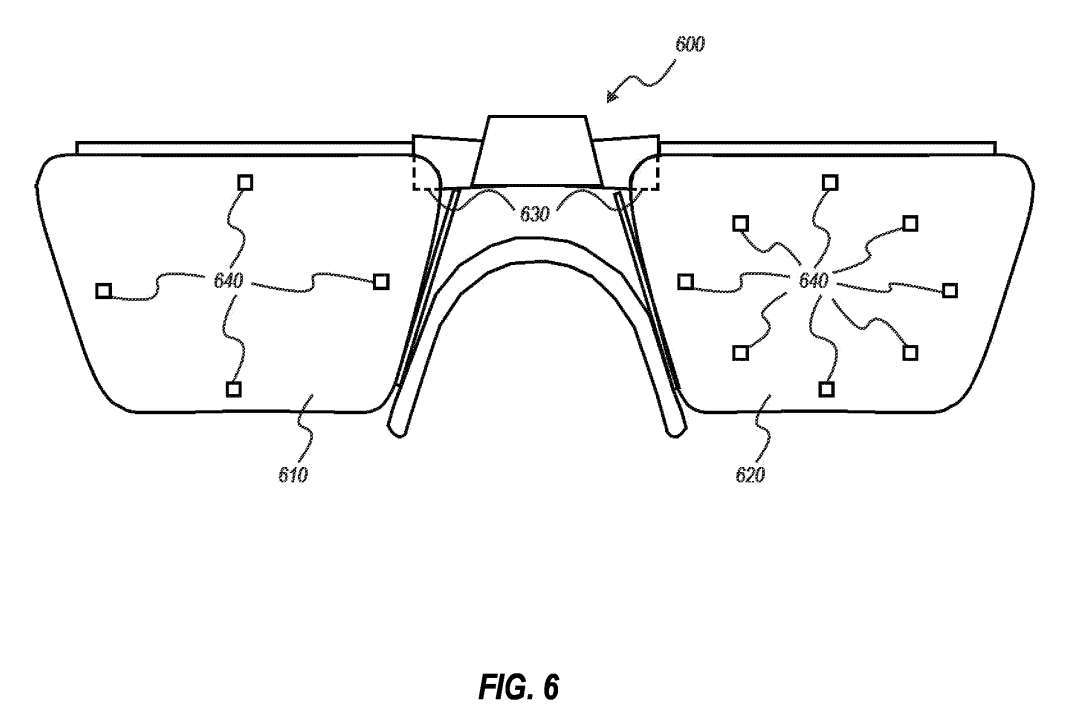 この例は、必ずしもヘッドセットの両側に一致/対称の赤外線 uLED 分布がある必要がないことを示すために使用されています。赤外uLEDの数および分布に関係なく、使用中、赤外uLEDから発せられた光は少なくとも部分的にユーザの目に向けられ、光は反射されてデバイスカメラ630によって検出され得ることを理解されたい。
この例は、必ずしもヘッドセットの両側に一致/対称の赤外線 uLED 分布がある必要がないことを示すために使用されています。赤外uLEDの数および分布に関係なく、使用中、赤外uLEDから発せられた光は少なくとも部分的にユーザの目に向けられ、光は反射されてデバイスカメラ630によって検出され得ることを理解されたい。
#### 関連する実施形態では、図7に示されるヘッドマウントディスプレイシステム700は、サンバイザーを備えた透明照明レンズ構造710を含む。この例では、バイザーの片側に円形のパターンを形成する複数の赤外線 uLED があります。バイザーの反対側には、正方形のパターンで配置された 4 つの赤外線 uLED があります。
前述のすべての例に関して、赤外線 uLED は比例的には表示されません。実際、IR uLED はトレースの厚さと同様に非常に小さい (
また、赤外線 LED は非常に小さいため、ユーザーが通過するレンズ内に配置しながら、レンズを通るユーザーの視野を妨げることなく、ユーザーの目を赤外線で照らすのに使用できます。導電性トレースは幅が 50 μm 未満、さらには 25 μm 未満と非常に薄いため、視覚的には目立たず、ユーザーの目の近くで使用すると基本的に見えません。この構成は、照明レンズ構造内にトレースを配置できるようにする上で特に有利である。ユーザーの目の前に直接配置しても、使用中にレンズを通したユーザーの視界を妨げることはありません。
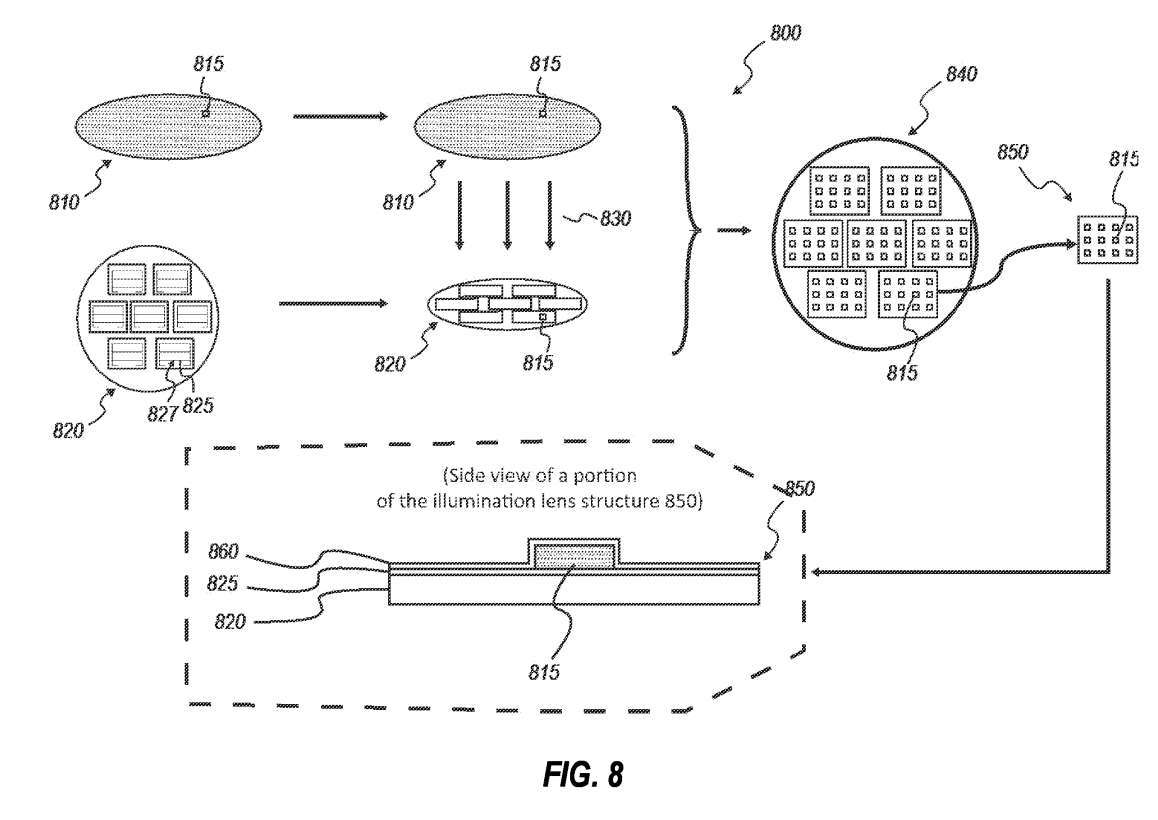
####示されるように、製造プロセスは、1つまたは複数の赤外線μLEDを含むウェハ810を取得することを含む。例えば、ウェハ810は、エピタキシャル成長または堆積プロセスによって形成されたエピタキシャルウェハであってもよい。
#### 図8に示されるプロセス800は、赤外線uLEDが転写される基板820を取得することも含む。図示されるように、転写プロセス830は、基板820上に既に存在し、基板上に1つ以上の異なる回路827を形成する導電性トレース825に1つ以上の赤外uLEDを転写するために実行される。基板から取り外して基板上に配置する IR μLED のサイズは、どの方向でも 100 μm 未満に制限されているため、IR μLED の測定可能な長さの最大寸法は 100 μm 未満です。
赤外線 uLED の最大サイズは、75 μm 未満、50 μm 未満、さらには 20 μm 未満です。一実施形態では、赤外線uLEDの最大寸法は約10μmである。
トレースの幅にも制限があり、厚さは 50 μm 未満、40 μm 未満、30 μm 未満、さらには 20 μm 未満にすることはできません。一実施形態では、トレース幅は約20μmである。
### 図9は、視線追跡を実行するように構成されたフロー図900を示し、ヘッドマウントディスプレイは、複数の赤外μLEDを含む照明レンズを含み、複数の赤外μLEDのそれぞれは、最大サイズが100μm未満である。
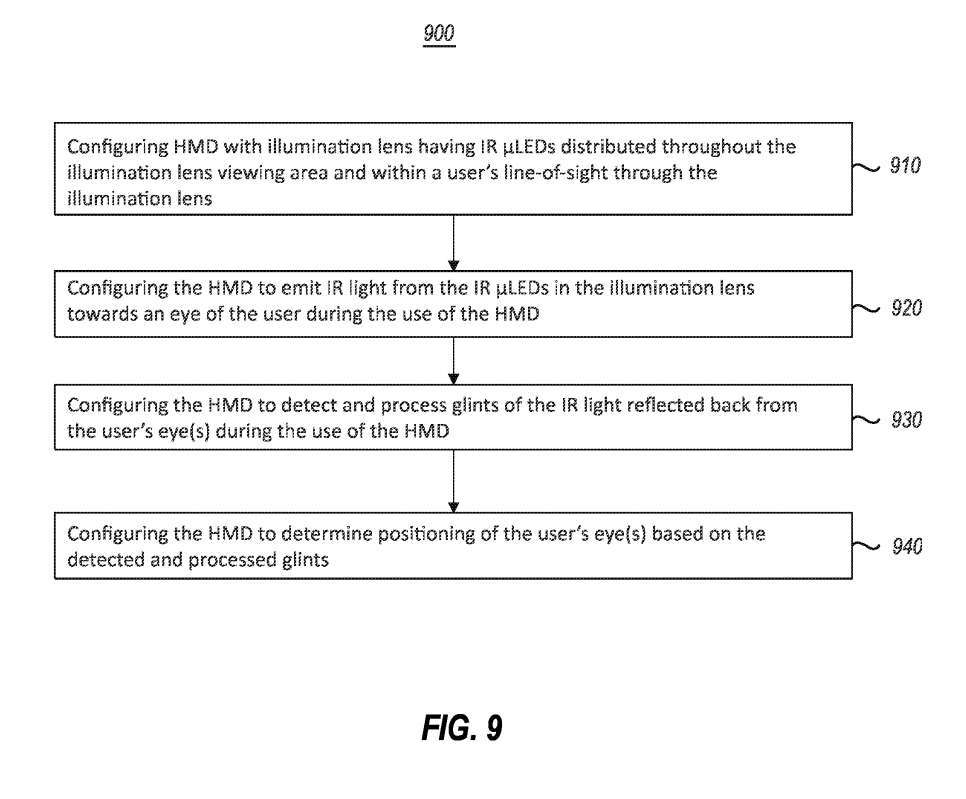 システム コンポーネントは赤外線 uLED の照明を制御し、照明レンズ内の 1 つ以上の赤外線 uLED からユーザーの目に向かって赤外線を放射します。
システム コンポーネントは赤外線 uLED の照明を制御し、照明レンズ内の 1 つ以上の赤外線 uLED からユーザーの目に向かって赤外線を放射します。
次に、ヘッドセットは、ヘッドセットの使用中にユーザーの目から反射される赤外光のちらつきを検出および処理し、検出および処理されたちらつきに基づいてユーザーの目の位置を決定するようにさらに構成されている。 ### ここで、複数の赤外線uLEDを使用して照明レンズ構造を製造するためのフローチャート1000を示す図10に注目する。
これには、透明な基板を得るために透明なバックプレーンに複数のトレースを適用することが含まれます。複数のトレースは導電性であり、アノード端子とカソード端子との間に少なくとも1つの電気回路を形成する。
次に、複数の IR μLED、または最大サイズが 100 μm 未満の個別の IR μLED に個別に抽出できる材料を含む IR μLED ウェーハが得られます。次に、1つ以上の赤外線uLEDのセットが所定のパターンで基板に転写され、赤外線uLEDがバックプレーン/基板上の少なくとも1つの回路に電気的に接続される。 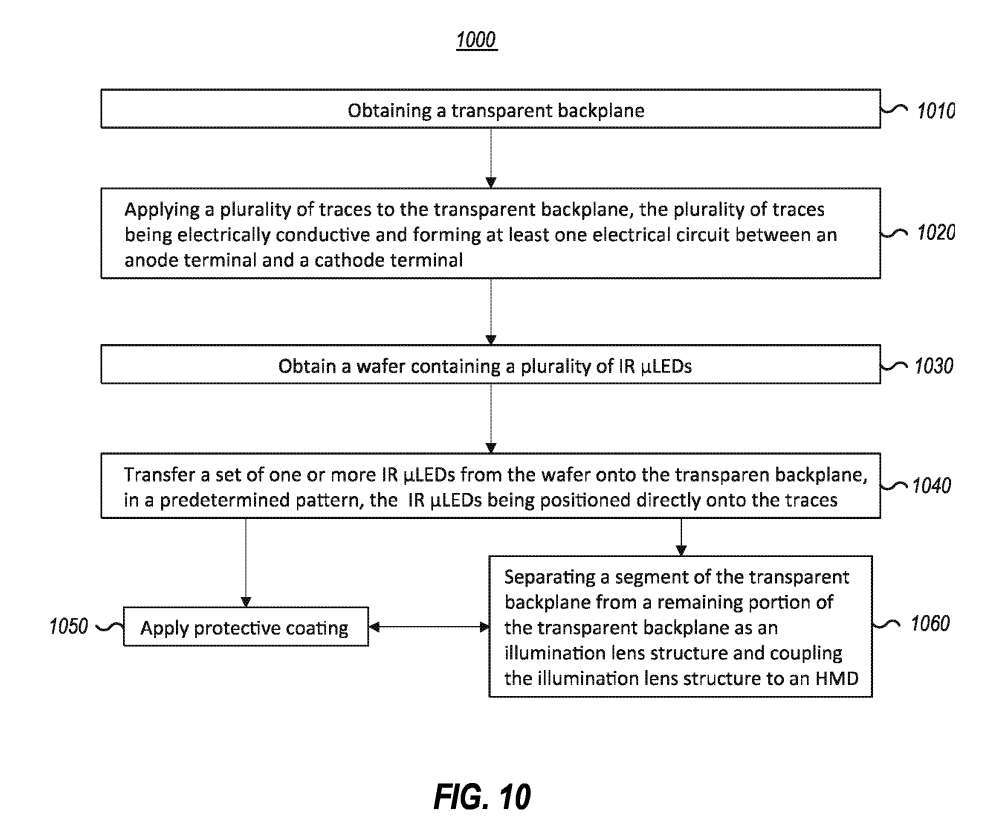
関連特許
: Microsoft 特許 | 視線追跡用の MicroLED ベースの不可視照明「視線追跡用の Microled ベースの不可視照明」というタイトルの Microsoft 特許出願は、2023 年 1 月に最初に提出され、最近米国特許商標庁によって公開されました。
一般的に、米国特許出願は審査後、出願日または優先日から 18 か月後に自動的に公開されるか、または要求に応じて出願日から 18 か月以内に公開されることに注意してください。申請者の。特許出願の公開は、特許が承認されることを意味するものではないことに注意してください。特許出願後、USPTO は実際の審査を必要とし、審査には 1 ~ 3 年かかる場合があります。
以上がMicrosoft AR/VR特許における任意の方向を実現する赤外線μLED照明レンズ構造法の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



