


最近、ワールドモデルのコンセプトが熱狂を引き起こしていますが、自動運転の分野では、どうやって遠くから「火」を眺めることができますか。中国科学院自動化研究所のチームは、エンドツーエンドの自動運転計画の安全性を強化することを目的として、Drive-WMと呼ばれる新しいマルチビュー世界モデルを初めて提案した。
ウェブサイト: https://drive-wm.github.io
論文の URL: https://drive-wm.github.io ://arxiv.org/abs/2311.17918
CVPR2023 自動運転セミナーではテスラとウェイブの二大テクノロジー大手がブラックテクノロジーを披露し、自動運転の分野では「生成世界モデル」と呼ばれる新しい概念が普及した。 Wayve は GAIA-1 生成 AI モデルもリリースし、その驚くべきビデオ シーン生成機能を実証しました。最近、中国科学院自動化研究所の研究者らも、新しい自動運転世界モデル - Drive-WM を提案しました。これは、マルチビュー予測世界モデルを初めて実現し、現在の主流エンドとシームレスに統合されています。までの自動運転プランナーです。
Drive-WM は、拡散モデルの強力な生成機能を活用して、リアルなビデオ シーンを生成します。
あなたが運転していて、車載システムがあなたの運転習慣や道路状況に基づいて将来の展開を予測し、対応する視覚的なフィードバックを生成して軌道ルートの選択をガイドしていると想像してください。この未来を予見する能力とプランナーを組み合わせることで、自動運転の安全性が大幅に向上します。
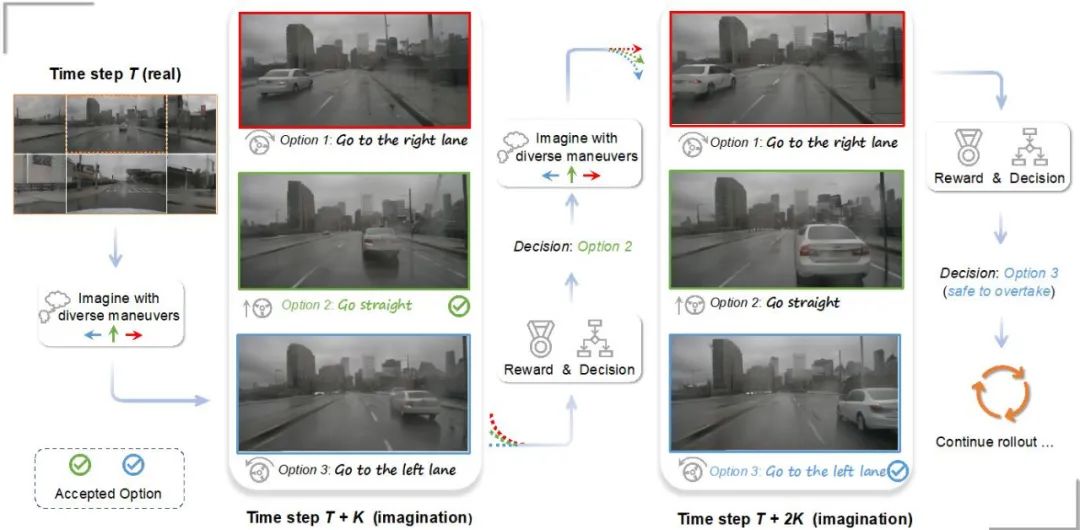
#多視点の世界モデルに基づいた予測と計画。

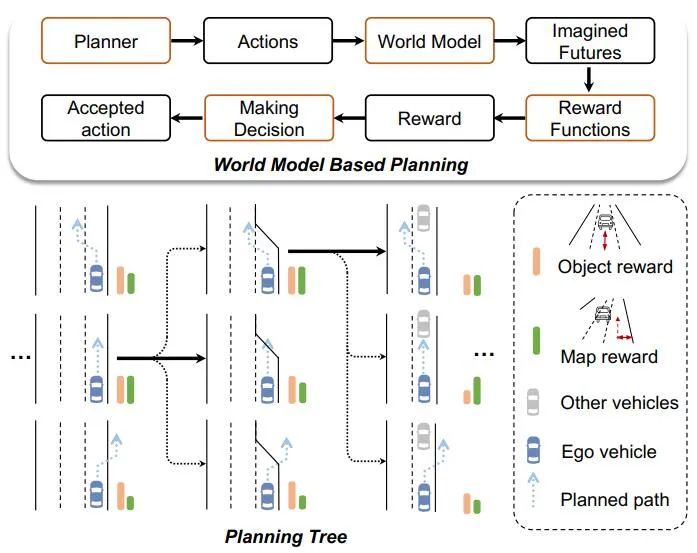
最適な見積り方法と拡張計画ツリー技術を採用することで、より効果的かつ安全な計画を実現できます


Drive-WM は、革新的な研究を通じてエンドツーエンドの計画におけるワールド モデルの 2 つのアプリケーションを調査します
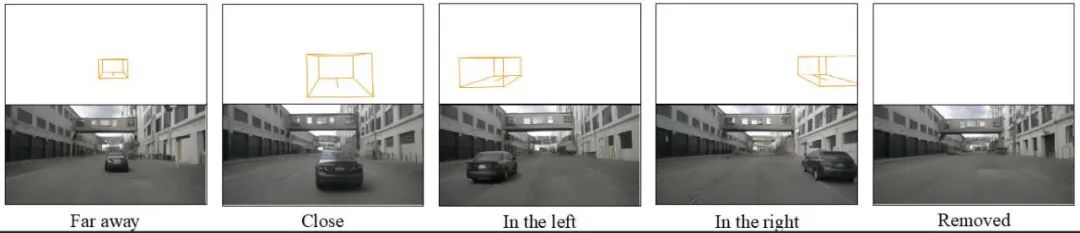
1. OOD に直面した場合のワールド モデルの使用を実証します。シーンの堅牢性。比較実験を通じて、著者は、OOD 状況に直面した場合、現在のエンドツーエンド プランナーのパフォーマンスが理想的ではないことを発見しました。
著者は次の図を示していますが、わずかな横方向のオフセットが初期位置に乱れると、現在のエンドツーエンドの計画作成者は合理的な計画ルートを出力することが困難になります。

エンドツーエンドの計画担当者は、OOD 状況に直面した場合、合理的な計画ルートを出力することが困難になります。
Drive-WM の強力な生成機能は、OOD 問題を解決するための新しいアイデアを提供します。著者は、生成されたビデオを使用してプランナーを微調整し、OOD データから学習し、そのようなシナリオに直面したときにプランナーのパフォーマンスを向上させることができます。エンドツーエンドの計画における将来のシナリオ評価の役割の強化
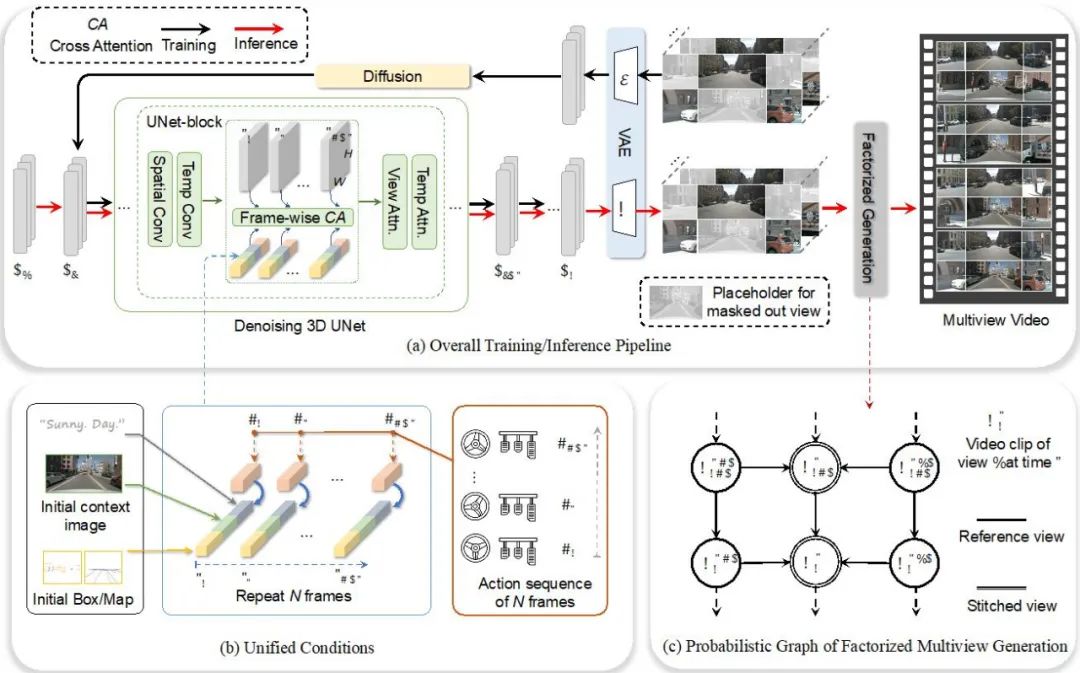
マルチビュー ビデオ生成モデルの構築方法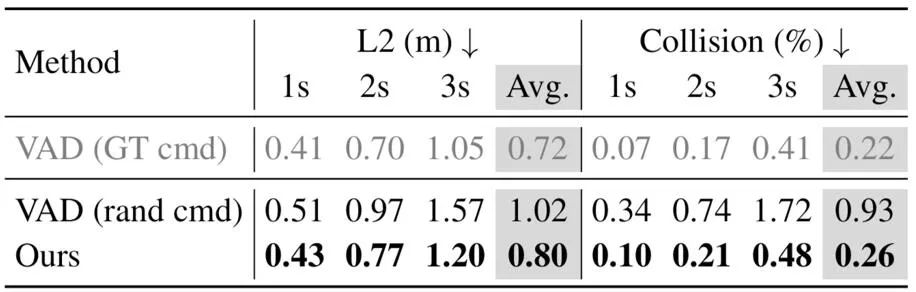
#Drive-WM の全体的なモデル設計
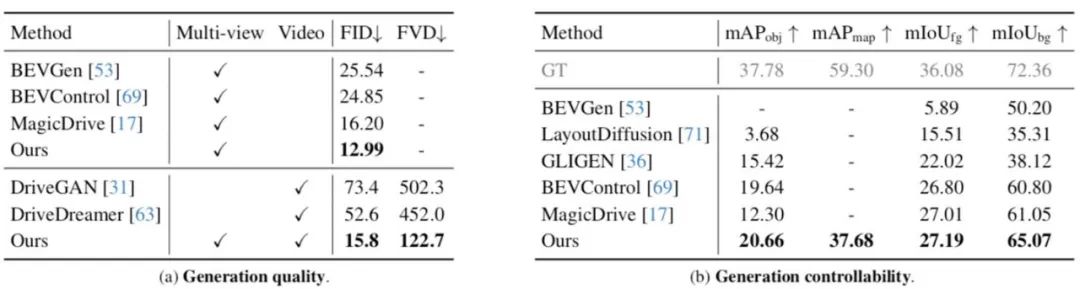
高品質な動画生成と制御性
たとえば、テキストを使用して天気や照明を変更します:
 ##例: 歩行者の生成と前景の編集:
##例: 歩行者の生成と前景の編集:

 #速度と方向の制御方法を使用する:
#速度と方向の制御方法を使用する:
方向転換などのまれなイベントを生成する交差点を曲がったり、脇の草むらに突っ込んだりした場合
##

Drive-WM は、強力なマルチビュー ビデオ生成機能を実証しただけでなく、世界モデルと端末 エンドツーエンドの駆動モデルを組み合わせるには大きな可能性があります。将来的には、世界のモデルがより安全、より安定、より信頼性の高いエンドツーエンドの自動運転システムの実現に役立つと私たちは信じています。
以上が未来への旅、初の多視点予測+計画自動運転世界モデルが登場の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。
















![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



