


要約:スウォーミングは、複数のドメイン (陸、海、空、宇宙) で複数の無人システムを調整して展開する、破壊的で革新的なテクノロジーです。新しいマイクロエレクトロニクス、誘導、ナビゲーション、センサー、人工知能技術の開発により、低コストのマイクロドローンが困難なミッションを実行できるようになりました。新しい意思決定プロセス、目標追跡、通信技術およびアルゴリズムと組み合わせると、群れは戦場に大きな影響を与える可能性があります。また、巡航ミサイルの迎撃などの重要な防衛能力だけでなく、継続的かつ検出不可能な監視能力を提供するためにも使用できます。この記事では、スウォーミングの分野におけるヨーロッパの研究活動について説明し、それが防衛に与える可能性のある重要な意味を掘り下げます。
キーワード: UAV、自律機能、ターゲット追跡、誘導と制御、センサーフュージョン

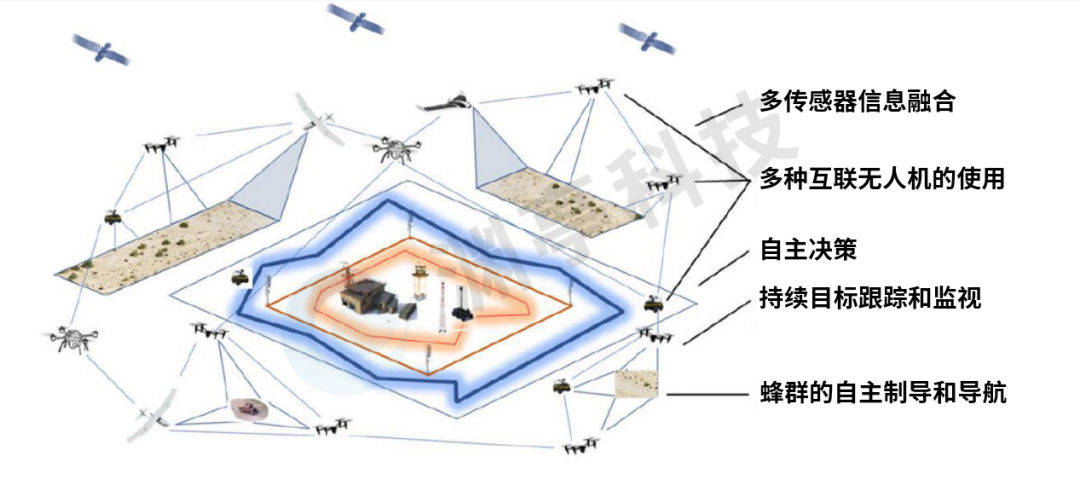 ドローン群は自律型または半自律型ドローンのグループで構成され、群れ内のドローンは共通の目標を達成するために互いに協力できます。ドローンの群れは、偵察、監視、攻撃作戦などのさまざまな軍事任務に使用できます。ドローン群の設計に関しては、軍事用途では次の 4 つの主要なテクノロジー モジュールを考慮する必要があります。センシング機能から群通信プロトコルやルーティングに至るまで、各モジュールはドローン群のパフォーマンスと安定性にとって重要です。
ドローン群は自律型または半自律型ドローンのグループで構成され、群れ内のドローンは共通の目標を達成するために互いに協力できます。ドローンの群れは、偵察、監視、攻撃作戦などのさまざまな軍事任務に使用できます。ドローン群の設計に関しては、軍事用途では次の 4 つの主要なテクノロジー モジュールを考慮する必要があります。センシング機能から群通信プロトコルやルーティングに至るまで、各モジュールはドローン群のパフォーマンスと安定性にとって重要です。
タスクの割り当てと独立した意思決定は、ドローンの群れにとって非常に重要です。効率的なタスク処理により、各ドローンにその能力に見合ったミッションが割り当てられ、利用可能なリソースの使用が最適化されます。 1 台または複数のドローンが故障した場合、群れは自動的にギャップを埋めることができ、タスクの割り当てにより決定事項が迅速に伝達され、群れが変化する環境に迅速に適応できるようになります。タスクの分散は、適応性、拡張性の向上、意思決定のスピードアップにも役立ち、動的で不確実な環境において群をより効果的にします。群れ内のドローン間のシームレスなデータ交換により、群れはより適切な意思決定を行うことができ、リソースの効率的な利用、安定性、耐障害性、適応性、拡張性が向上します。
3. 経路計画と衝突回避:ドローンの群れは通常、多数のドローンで構成されます。ドローン群の効率的かつ安全な運用を実現するには、経路計画と衝突回避方法が重要です。群れの経路計画の中核は、障害物を回避し、必要な時間とエネルギーを最小限に抑えながら、各ドローンが目的地に到達するための最適な経路を見つけることです。衝突回避によりドローンが衝突することがなくなり、各ドローンが無事に任務を完了できるようになります。たとえば、監視ミッションでは、経路計画によりドローンの行動ルートを最適化し、重複するエリアを最小限に抑え、カバー範囲を拡大できます。現在、経路計画と衝突回避を実現するための、集中型の方法や分散型の方法など、さまざまな技術が存在します。集中型アプローチには、個々のドローンの計画と、群れ内のすべてのドローンの経路の調整が含まれます。分散型アプローチでは、各ドローンがローカル情報に基づいて独自の経路計画の決定を行います。
4. 通信:群れ内のドローン間の通信が遅延なくオープンなままであれば、群れは最適に動作します。センサー フュージョンを通じて、群れは高決定性と高解像度の情報を提供できます。効果的な通信プロトコルにより、ドローンは位置、ステータス、タスクの割り当てなどの情報を共有できるようになり、ルーティングはドローン間の情報伝達に最適なパスを見つける役割を果たします。これにより、群れが連携して行動を調整し、リアルタイムで情報を共有できるようになります。現在、アドホックネットワーク技術、メッシュネットワーク技術、マルチホップルーティング技術など、通信プロトコルやルーティングを実現するさまざまな技術が存在しています。アドホック ネットワークにより、固定インフラストラクチャを必要とせずにドローン同士が直接通信できるようになります。一方、メッシュネットワークはドローンを利用して通信経路を冗長化したネットワークを形成します。マルチホップルーティングによりドローン間での情報の中継伝送を実現し、より長距離の通信を実現します。
UAV 群の通信プロトコルは、ミッション要件と群の特性に応じて調整して、情報交換を実現できます。現在、軍用ドローンの群れを設計するには、次の 3 つの主要なアーキテクチャ アプローチがあります。
1. 集中型アーキテクチャ:このアプローチでは、群れ内のすべてのドローンの運用が地上管制局などの中央制御エンティティによって調整されます。中央制御エンティティは、群れと通信してデータを収集し、データを処理し、意思決定を行うことができます。この方法は、小さなコロニーや単純なタスクに適しています。
2. 分散型アーキテクチャ:このアプローチでは、中央制御エンティティは存在せず、群れ内の各ドローンは独立して動作し、ローカル情報に基づいて意思決定を行い、他のドローンが運ぶものと対話することができます。アウト情報コミュニケーション。このアプローチは、大規模な群集ミッションやその他の非常に複雑なタスクに適しています。
3. ハイブリッド アーキテクチャ:このアプローチは、集中型アーキテクチャと分散型アーキテクチャの利点を組み合わせたものです。このアプローチでは、ドローンに高レベルのナビゲーションを提供する中央制御エンティティがあり、各ドローンは自律的な意思決定機能を備えています。
ドローン群は軍事分野で幅広い用途があり、さまざまな任務を実行できます。以下は、いくつかのタイプの自律的な群動作の主な例です:1. エリア カバレッジ:エリア カバレージ作戦では、群れの任務は、ドローンに搭載されたセンサーを使用して特定のエリアをスキャンすることです。ほとんどの場合、理想的なエリア カバレージは 100% であり、ドローンはエリアを完全にスキャンする必要があります。複数のドローンでエリアをカバーすると、いくつかの問題が発生する可能性があります。これらの問題に対処する一般的な方法には、分解技術を使用して焦点エリアを一連のサブエリアに分割し、各サブエリアにドローンを展開することが含まれます。さまざまなタイプのドローンを含む群れの場合、システムの効率を向上させるために、エリア分割プロセス中にセンサーの範囲、ドローンの操作性、および範囲を考慮する必要があります。各ドローンにサブエリアが割り当てられた後、これらのドローンはそれぞれのエリア内での経路を個別に計画する必要があります。カバレッジ パスの計画方法には、2D、3D、およびマルチ UAV エリア カバレッジが含まれます。
2. 包括的かつ持続的なエリア カバレッジ:包括的かつ持続的なエリア カバレッジには、ドローン群の展開と、ミッション全体を通じて特定のエリア全体にセンサー カバレッジを提供する能力が必要です。群れ内のドローンは、センサーの位置と、障害物や遮蔽領域などの考えられる環境特徴に基づいて編隊を形成する必要があります。群れ内の UAV は、地域の特性や監視エリアが時間の経過とともに変化するにつれて、静的または動的に展開されます。主な目的は、最小限のドローン数で完全な静的カバーを達成する編隊パターンを設計することです。
3. エリア捜索:エリア捜索作戦では、ドローン群の任務は通常、主要エリアで特定の目標を捜索することです。この操作では、エリアを完全にカバーする必要はありません。群れはエリア内のターゲットを最短時間で特定しなければなりません。群れ内のドローンはミッション全体を通じて協力する必要があり、オンラインの意思決定と経路計画技術を使用して、環境に対する自身の認識と他のドローンの動作に基づいてシステムのパフォーマンスを向上させます。群集領域検索アルゴリズムを使用して、ターゲット分布の確率を予測できます。バイオニックスウォームアルゴリズムは、エリア捜索活動においても科学的な関心を集めています。
4. エリア監視:エリア監視操作では、群れが特定のエリアを継続的に監視する必要があります。エリア監視は通常、パトロール、監視、緊急または動的な脅威の検出、国境警備に使用されます。このアクションは、2 つの長い監視期間の間の時間を最小限に抑えることを目的としています。
5. ターゲット追跡:通常のターゲット追跡操作には、ターゲットとドローンが関与します。ドローンの追跡範囲は、センサーデータとターゲットの位置の推定、場合によってはターゲットの予測された行動や将来の位置に基づくオンライン経路計画に基づいています。ドローンは常にターゲットを追跡できるように、自律的に航行する必要があります。群機能の導入により、単一または複数のターゲットを追跡できる複数のドローンでターゲット追跡タスクを完了できるようになります。
軍用ドローンの群れの設計には、ミッション要件、群れのサイズ、通信能力、コンピューティング リソースなど、複数の要素を包括的に考慮する必要があります。
1. 低可観測性無人航空機システム「LOTUS」
「ロータス」プロジェクトは、ギリシャとキプロスの9社とスペインとオランダの2社で構成される欧州防衛産業開発プログラム(EDIDP)プロジェクトです。このプロジェクトは、Intracom Defense が主導し、2020 年 12 月に開始され、45 か月間続きます。ロータス プロジェクト チームは、戦術的な航空偵察および監視任務のための高度な無人航空システムを設計しました。 UAV は、ステルス能力、スタンドオフ戦闘能力、耐空性、NATO 標準に基づく相互運用性、ネットワーク セキュリティを考慮した信頼性の高い通信など、いくつかの重要な機能を備えています。さらに、このシステムは人工知能テクノロジーを広範囲に使用して、複雑なタスクを正確に実行できるようにします。プロジェクトチームが設計したUAV母船は複数の赤外線センサーを搭載し、観測性が低く耐久性が高く、敵の脅威に対処するための自己防衛システムも装備している。この UAV キャリアは、高度な自律機能と複雑な ISR ミッションを実行する能力を備えた 4 機の発射管式折りたたみ翼 UAV を配備できます。ドローン母船とドローンは一緒になって強力なドローン群を形成し、遅延のないコラボレーションを実現し、現場の意思決定者に重要なインテリジェンスと監視データを提供できます。図 2 では、パトラス大学で開発された群アルゴリズムを介して、地上目標の諜報任務 (左) と共同取材 (右) が実行されています。図 2: 「Lotus」プロジェクトにおけるドローンの群れアクションの例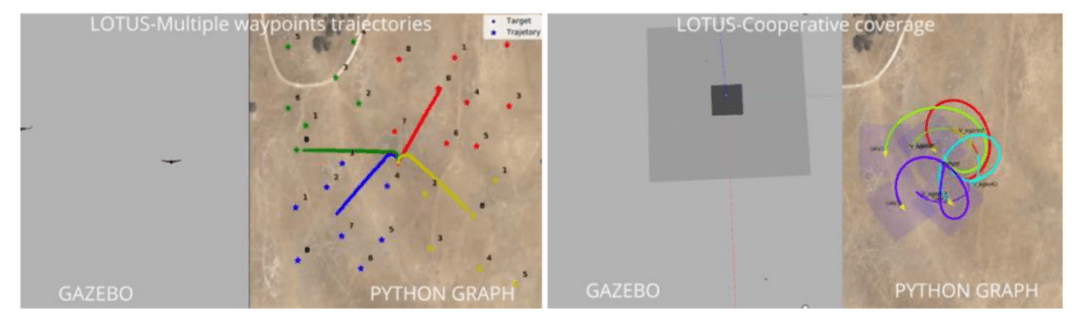
2. 防衛用途向けの自律的で再構成可能なドローン群 - 「ACHILLES」。 書き直された内容: ACHILLES は防衛用途向けの自律的で再構成可能なドローン群です
「Achilles」プロジェクトは欧州国防庁のプロジェクトであり、ギリシャとドイツの企業と大学の共同プロジェクトです。このプロジェクトは 2023 年 1 月に開始され、パトラス大学が主導しており、ATOS、DroniQ、Scytalvs、Intracom Defense、パトラス大学、インゴルシュタット応用科学大学、アテネ大学が参加する企業や学校が参加しています。このプロジェクトは、特定の防衛任務向けに自律的で再構成可能なドローン群のTRLを増加させることにより、防衛分野におけるドローン群の開発と使用を促進し、継続的な監視能力と戦闘準備レベルに対するドローン群を実証することを目的としています。プロジェクト チームは、ドローン群のさまざまな利点と潜在的な用途を発見し、これをアキレス プロジェクトを推進するためのインスピレーションとして利用しました。最近の技術の進歩により、ドローンは重要なデータを自動的に取得して状況認識を強化できるようになりました。スケーラブルで自律的かつ再構成可能なドローン群は、非常に効果的な地域調整機能とさまざまなイベントへの強力な適応性を備えています。このプロジェクトの成果と革新には、軍空域と民間空域へのドローンの安全かつ効果的な統合を可能にする新しいドローン群行動能力と方法が含まれることが期待されています。これらの機能は、ドローン群ベースのシステムとテクノロジーの成熟と検証をサポートします。3. 有人・無人システム護衛運用「COMMANDS」プロジェクト 書き換え内容:3. 有人・無人システムの護衛運用「COMMANDS」
「コマンド」プロジェクトは、10 か国の 21 社が参加する欧州国防基金 (EDF) プロジェクトです。 2022 年 12 月に開始される 3 年間のプロジェクトは、Sener Aerospace が主導し、7 か国の国防省の支援を受けています。これらの国の防衛省は、プロジェクト開発の基本要件もプロジェクトに提供します。プロジェクトの目標は、機敏でインテリジェントで協調的な有人および無人のシステム ライフサイクル機能 (TLC) を開発することです。このプロジェクトには、シームレスな機能サービスとデータ交換を通じてスウォーミング機能を可能にするいくつかのモジュラー システムが含まれます。このシステムは、有人および無人の地上車両とドローンで構成されます。プロジェクトのリスクを軽減するために、このプロジェクトではさまざまなテクノロジーを使用して、自立可能な EU 防衛 TLC の持続可能性ロードマップを開発しています。最終的に、このプロジェクトは既存の地上車両をアップグレードし、将来の車両に統合される予定です。このプロジェクトでは、技術デモンストレーターを通じて技術を検証する予定です。このデモンストレーターは、「ラストマイル」補給を行う輸送船団に武装護衛を提供することに重点を置き、現実のシナリオで実験室やモバイルデモンストレーターで実施されます。
以上がドローンの群れ: 防衛用途における革新的なテクノロジーの詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。





























![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



