


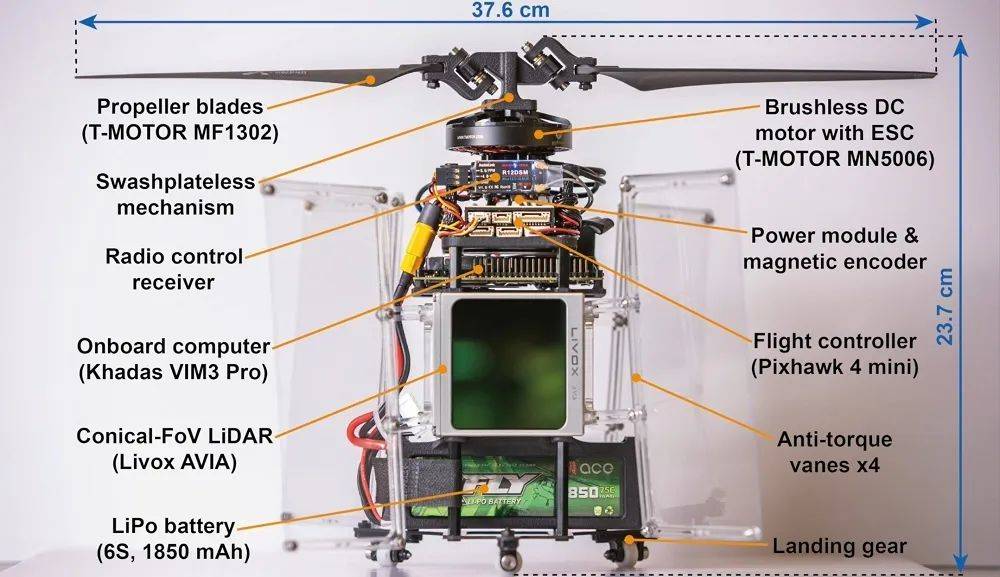
PULSARの構造図
[グローバル ネットワーク ドローン総合レポート] 香港大学からのニュース、最近、香港大学 (HKU) 工学院機械工学科助教授、張福博士率いるチームが発表は最近、ドライバーを必要としない動力飛行を設計しました。レーダー感知ドローンは PULSAR と呼ばれます。 「パルサー」は、SF映画「プロメテウス」で人間がスピン検出器を使って洞窟の3次元地図をリアルタイムに構築するシーンのように、センシングやマッピングなど複数の機能を備えている。
報道によると、捜索救助、洞窟探検、建築地図作成などの多くの分野でドローンの重要性が徐々に高まっているそうです。張博士のチームは回転運動に焦点を当てています。「パルサー」は動力飛行を使用し、レーダー感知を駆動する必要がありません。その回転運動と LIDAR ビームの走査モードのため、直感的には天文学におけるパルサーに似ています。とても似ている。 「パルサー」にはマイクロオンボードコンピューターとライダーが装備されており、屋内または屋外の環境で外部機器の支援を必要とせずに、完全に自律的な認識、マッピング、計画、および制御を可能にします。単一のアクチュエータをパルサーに使用して、推力とトルクを同時に生成できる斜板のない機構を駆動します。
張博士のチームは、「パルサー」を使用して環境探索と多方向の動的障害物回避の実験を実施し、その結果、外部デバイスの支援に依存せずに未知の環境で自律ナビゲーションを実行し、静的および動的障害物を検出できることが示されました。環境内でリアルタイムに。
「パルサー」は夜間でも完全自動航行が可能であり、その航行性能が光条件に制限されないことを示しています。さらに、外部からの風の乱れにも対応できます。最大風速4.5メートル/秒の風にさらされても、「パルサー」は狭い範囲でホバリング位置を維持できる。これらの機能により、航空機は野生環境においてより安全で安定したものになります。
センサーは、固有の回転運動によって視野を広げることもできるため、上記の機能に加えて、ドローンの認識能力とミッション効率も向上します。センサーの視野を拡大するために現在使用されている主な方法は 2 つありますが、それらの共通の特徴は全体の消費電力が高いことです。考えられるアプローチの 1 つは、魚眼レンズ、反射カメラ、360 度ライダーなどの広い視野を持つセンサーを使用することです。しかし、魚眼カメラや自己反射型カメラは変形が大きい場合が多く、360度ライダーの垂直方向の視野は依然として狭く、解像度も低いです。マルチカメラ システムやマルチライダー システムなど、複数のセンサーを同時に使用する方法もありますが、マルチセンサー システムを使用すると追加のコストとデータ処理時間が長くなります。同様に、ジンバルシステムを使用して視野を拡大する場合も同様の問題が発生します。
Zhang 博士のチームは、「パルサー」が同じブレード面積と負荷を持つクアッドコプター ドローンと比較して、優れた柔軟性を維持しながらエネルギー消費を 26.7% 節約できることを発見しました。パルサーの電源システムは単一のアクチュエーターを使用して、より高いエネルギー変換効率を達成し、全体の効率はワットあたり最大 6.65 グラムです。直径わずか 37.6 cm のプロペラと 41 ワット時容量の小型バッテリーのみを備えたこの重量 1,234 グラムのドローンは、12 分以上のホバリング時間を達成しました。ライダーをより大きなプロペラとバッテリーに置き換えれば、「パルサー」のホバリング時間は 40 分以上に延長される可能性があります。
研究結果は、Science Robotics に掲載されました。記事のタイトルは「A self-rotating, single-actuated UAV with Extended Sensor Field of Autonomous Navigation」で、Science Website のホームページ写真に掲載されました。
張博士は、彼のチームが確立した研究プラットフォームは、回転ドローンに関するより詳細な研究に役立つと述べ、「このプラットフォームの確立は、高速下でのドローンの制御方法の探索に役立つと信じています」と述べました。 「ローカリゼーションとマッピング (SLAM) テクノロジー」
以上が洞窟探検の遺物?自律航行機能を備えたシングルローターの自動回転ドローンで、より効率的です。の詳細内容です。詳細については、PHP 中国語 Web サイトの他の関連記事を参照してください。





























![[Web フロントエンド] Node.js クイック スタート](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



