


Les robots ont été largement utilisés dans de nombreux domaines tels que les plats à emporter, la livraison express, le guidage dans les aéroports et l'inspection technique de la construction. Cependant, une des difficultés est de se déplacer parmi la foule
Actuellement, les robots s'appuient principalement sur des caméras et d'autres capteurs pour observer l'environnement environnant. Cependant, cette solution n'est pas stable et les personnes environnantes ajusteront dynamiquement leurs directions, il est donc difficile pour les robots d'être utilisés dans des scènes de foule.
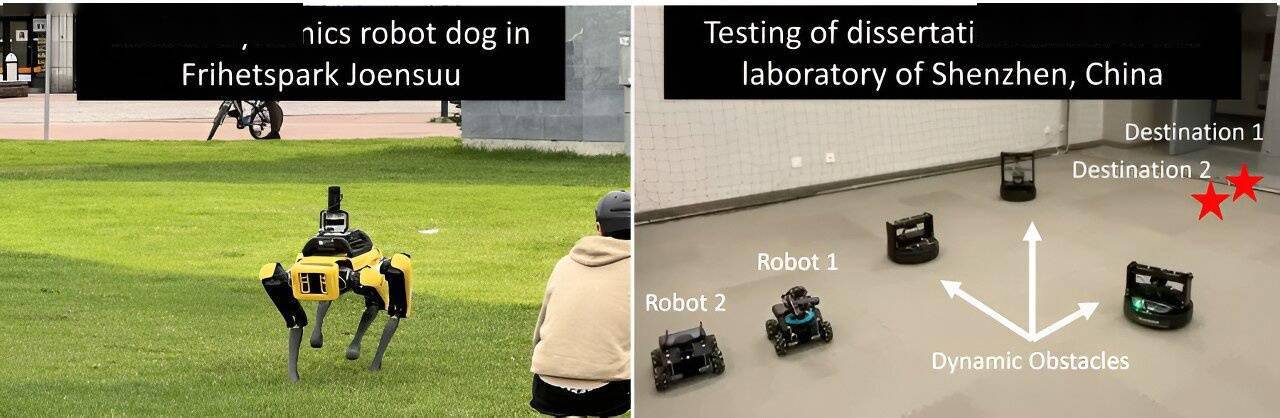
Dans le dernier article, Chengmin Zhou, MSc, propose un algorithme d'apprentissage par renforcement (RL) pour guider les robots à se déplacer dans les foules
Il s'agit d'un algorithme d'apprentissage par renforcement sans modèle qui permet aux robots d'apprendre de l'expérience historique.Après une formation ou un apprentissage, le robot peut naviguer même dans des situations difficiles.
IT Home Remarque : Cette méthode présente également de nombreux défis, tels qu'un effet d'apprentissage lent, l'incapacité d'analyser efficacement les informations des capteurs, ce qui entraîne l'incapacité de gérer efficacement des scènes de foule complexes, etc.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 Algorithme de remplacement de page
Algorithme de remplacement de page Quelle devise est l'USDT ?
Quelle devise est l'USDT ? vue de clé sans fil
vue de clé sans fil Comment utiliser la fonction countif
Comment utiliser la fonction countif Que signifie le réseau maillé ?
Que signifie le réseau maillé ? Introduction aux types de zones de texte HTML
Introduction aux types de zones de texte HTML Comment résoudre l'exception de débordement de pile Java
Comment résoudre l'exception de débordement de pile Java Comment augmenter le nombre de fans de Douyin rapidement et efficacement
Comment augmenter le nombre de fans de Douyin rapidement et efficacement




















![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



