


Dans les modules de positionnement, de perception, de prédiction, de planification de décision et de contrôle de la conduite autonome, le module de perception est comme les yeux et les oreilles humains, chargés de détecter l'environnement externe ; le module de contrôle est comme les mains et les pieds humains, responsables de l'accélération finale. , décélération, direction et autres opérations ; et le module de planification de prise de décision est comme le cerveau humain, prenant des décisions comportementales et générant une trajectoire en fonction de la perception reçue et d'autres informations.
Bienvenue pour suivre le compte vidéo WeChat « Smart Driving Frontier ». Tout comme le cerveau humain est divisé en cerveau gauche et cerveau droit, le module de planification décisionnelle peut être divisé en couches de prise de décision comportementale (couche comportementale) et. couche de planification de mouvement (Motion Planning) .
Parmi eux, après avoir reçu le chemin global, la couche de prise de décision comportementale combine les informations sensorielles pour prendre des décisions comportementales spécifiques ; la couche de planification de mouvement prévoit de générer une trajectoire qui satisfait des contraintes spécifiques basées sur les décisions comportementales spécifiques, et cette trajectoire est utilisé comme entrée du module de commande. Détermine la trajectoire de conduite finale du véhicule.
À mesure que le niveau de conduite autonome continue de s'améliorer, l'importance de la couche de prise de décision et de planification, en tant que cerveau de la conduite autonome, augmente également. Mais comparé au cerveau humain, le cerveau de la conduite autonome a encore un long chemin à parcourir. Cet article détaillera les problèmes et les défis de la planification de mouvement dans la planification de chemin en dix mille mots.
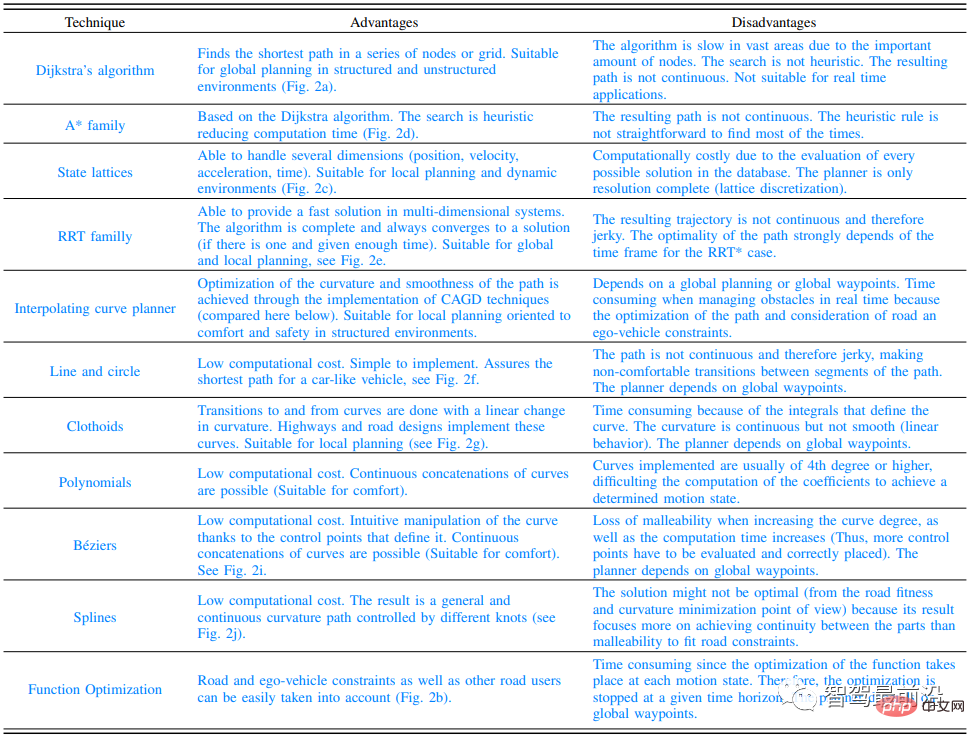
Les algorithmes de planification de mouvement ont été développés dans le domaine de la robotique et ont progressivement développé divers algorithmes adaptés au domaine de la conduite autonome. L'article [1] donne un aperçu de la méthode de génération de trajectoire de la planification de mouvement. La méthode introduite est présentée dans la figure ci-dessous.
Algorithmes basés sur la recherche d'échantillonnage : Dijkstra, RRT, A*, hybridA* et Lattice, etc.
Algorithmes basés sur l'interpolation de courbes : courbe RS, courbe de Dubins, courbe polynomiale, courbe de Bézier, courbe spline, etc. ;
Algorithmes basés sur l'optimisation : jerk par morceaux d'Apollo, etc. ;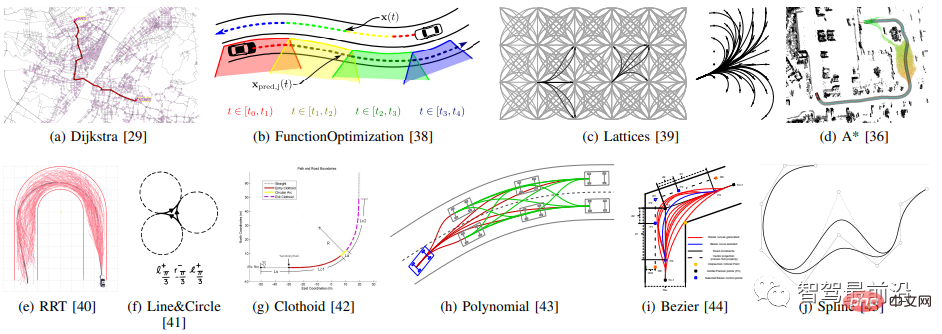
Multi-Agent ;
Problèmes d'ingénierie.
2.1 Problème d'optimalité
L'optimisation globale est un problème NP-difficile [3]. Pour des performances en temps réel, la plupart de l'industrie adopte des méthodes de planification de découplage horizontal et vertical. Cependant, cela sacrifierait l'optimalité et un bon comportement du véhicule ne peut pas être obtenu dans certaines conditions de travail, telles que les dépassements [2], les véhicules venant en sens inverse, le traitement des contraintes d'accélération centripète et la planification horizontale qui nécessite la prise en compte des capacités de planification longitudinale.
Si une méthode de planification spatio-temporelle intégrée est adoptée, les comportements de décélération ou de stationnement peuvent être évités. L'image de gauche dans la figure ci-dessous est un exemple de la méthode de découplage Lorsqu'il y a un véhicule en décélération et en stationnement devant, l'ADC décélère. L'image de droite est un exemple de planification spatio-temporelle. L'ADC dépassera lorsque le véhicule qui vous précède ralentit.
2.2 Problème de raisonnement cognitif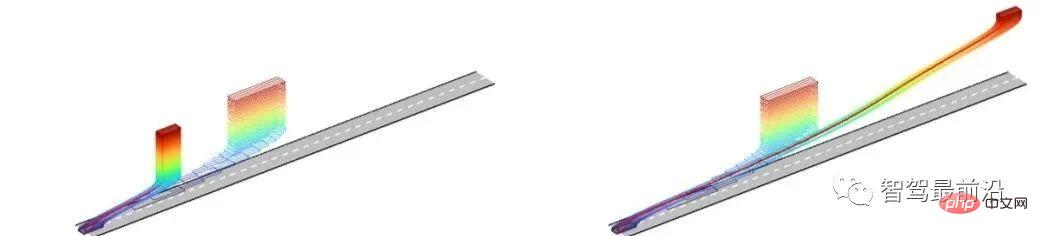
En prenant Apollo comme exemple, le module PNC Map extrait les données du module HD Map pour former une ligne de référence et interroge les routes via l'API interface de l’élément du module HD Map. Cependant, le module de planification de mouvement ignore certaines relations topologiques routières, telles que les intersections entrantes et sortantes, et ces topologies routières spéciales affecteront le comportement du véhicule. De plus, sans le module HD Map et en s'appuyant uniquement sur les lignes visuelles des voies, la perception des lignes de voie sera anormale à ce moment-là. Le problème de topologie routière est particulièrement important dans les routes entrantes et sortantes et les routes d'intersection.
2.2.2 Modélisation unifiée des obstaclesLes participants aux scènes de circulation comprennent les véhicules, les motos, les vélos, les piétons, les cônes, etc. D'une manière générale, il inclut également des éléments de carte statiques tels que les passages pour piétons, les feux de circulation et les limites de vitesse sur route. La planification des mouvements doit prendre des décisions différentes pour différents éléments. La modélisation unifiée des obstacles peut simplifier le problème et améliorer l'efficacité des calculs.
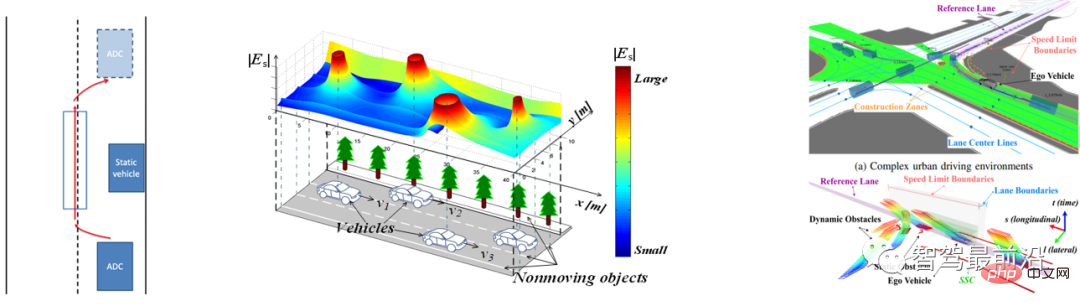
Aopllo résume tous les participants à la circulation en obstacle statique, obstacle dynamique et obstacle virtuel est la boîte, l'obstacle statique et l'obstacle dynamique sont des véhicules, des piétons, etc., et l'obstacle virtuel est des passages pour piétons, aucune aire de stationnement, etc. L'obstacle virtuel n'est pas pris en compte lors de la planification du chemin.
Utilisez des méthodes liées au champ énergétique pour représenter les participants à la circulation à l'aide de fonctions énergétiques. L'image du milieu dans l'image ci-dessus est le champ de sécurité de conduite proposé par Tsinghua [4], qui comprend le champ d'énergie potentielle des objets stationnaires, le champ d'énergie cinétique des objets en mouvement et le champ de comportement du conducteur. La trajectoire optimale consiste à trouver une trajectoire avec une somme d'énergie minimale.
Le document [5] divise les participants à la circulation en obstacles et en contraintes. Les véhicules dynamiques et statiques, les feux rouges, etc., qui sont cartographiés sur la grille 3D de SLT, ressemblent à des obstacles. Les limitations de vitesse, les panneaux d'arrêt, etc., en tant que limites sémantiques, sont de type contrainte. Selon les actions de séquence de décision, plusieurs limites de cube sont générées dans l'espace de configuration SLT pour la génération de trajectoire.
2.2.3 Raisonnement cognitif par scénario
En raison de la complexité de l'environnement réel, il est difficile pour une stratégie de prise de décision ou une méthode de planification de gérer différentes conditions de travail. Par conséquent, classer l’environnement de conduite et choisir différentes stratégies dans différents scénarios peut améliorer les performances de la planification de mouvement. Alors, comment effectuer la classification et la reconnaissance de scènes, et quelles sont les différences entre la planification de mouvement dans différentes scènes ? Ces problèmes doivent tous être résolus.
La classification des scènes dans Aopllo est LANE_FOLLOW, SIDE_PASS, STOP_SIGN_UNPROTECTED, etc. Il existe deux méthodes de reconnaissance de scène, l’une par le biais de règles et l’autre par l’apprentissage automatique. Différents scénarios comportent différentes étapes et les tâches sont exécutées séquentiellement au cours des étapes. Même la même tâche peut avoir des configurations de paramètres différentes selon les scénarios.
Sur la base des caractéristiques des scènes urbaines avec de nombreuses intersections, embouteillages et changements de voie, Haimou divise les scènes de conduite en dix catégories, ce qui est évidemment différent de la classification des scénarios d'Apollo. Cependant, la méthode de reconnaissance de scène de Haimou est inconnue. Hao Mo a également proposé le concept d'entropie de l'environnement de conduite pour décrire l'état de congestion de l'environnement de conduite.
2.3.1 Incertitude de positionnement
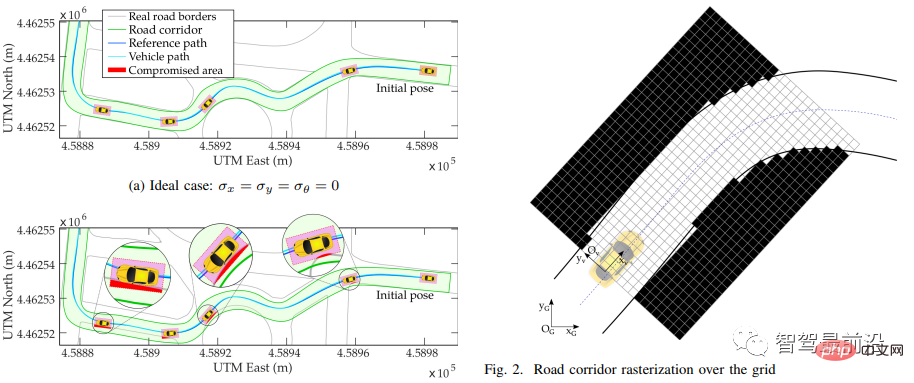
Dans la plupart des planifications de mouvement, le positionnement est considéré comme suffisamment précis. Cependant, dans les scénarios réels, en raison de problèmes tels que l'occlusion et les interférences multitrajets, le positionnement est souvent inexact. Comme le montre la figure inférieure gauche de l'article [6], l'erreur de positionnement provoque des erreurs dans la limite de route interrogée par le module HD Map, de sorte que la planification et les trajectoires de conduite des véhicules se trouvent sur la limite de route.
Image
L'article suppose que l'incertitude de positionnement est une distribution gaussienne et que le module de positionnement peut calculer l'espérance et la variance de la distribution de probabilité. Le document convertit le système de coordonnées du véhicule en système de coordonnées UTM Selon la distribution à grande vitesse du positionnement et la formule de transformation des coordonnées, l'incertitude de l'environnement du véhicule sous l'influence du positionnement peut être calculée, comme le montre la figure ci-dessous. à droite en haut, où plus la couleur est foncée, plus l'incertitude est grande, la formule de calcul de l'incertitude est principalement obtenue par la formule suivante.
On constate que plus on s'éloigne de l'ADC, plus l'incertitude est élevée. À mesure que le véhicule avance, son incertitude sera mise à jour. La méthode de planification de chemin utilise la méthode Lattice (courbe polynomiale quintique) et deux éléments sont ajoutés lors du calcul du coût. La première est une contrainte stricte : l'incertitude maximale d'un point sur la trajectoire de planification ne peut pas être supérieure à un certain seuil ; la seconde consiste à ajouter la somme des poids des incertitudes dans la fonction de coût ;
2.3.2 Incertitude de perception
En raison du bruit des capteurs, des vibrations du véhicule, de l'environnement de conduite et des algorithmes imparfaits, les résultats de perception sont incertains, voire erronés. L'incertitude perçue peut entraîner une insécurité dans les résultats de la planification de mouvement. Une méthode de traitement simple consiste à ajouter un tampon, mais une méthode de traitement grossière réduira la plage réalisable de planification de mouvement et peut aboutir à une stratégie de conduite trop agressive ou trop conservatrice.
L'article [7] prend comme exemple une application de stationnement équipée d'Around View Monitoring (AVM). En raison de l'erreur de perception, la planification de la trajectoire entraînera un stationnement à la position réelle de dépassement et une collision peut se produire, comme le montre l'exemple. la figure de gauche ci-dessous. L'article modélise l'incertitude perçue sous la forme d'une distribution gaussienne. Plus l'effet perçu est éloigné de l'ADC, plus l'incertitude est élevée, comme le montre la figure de droite ci-dessous.
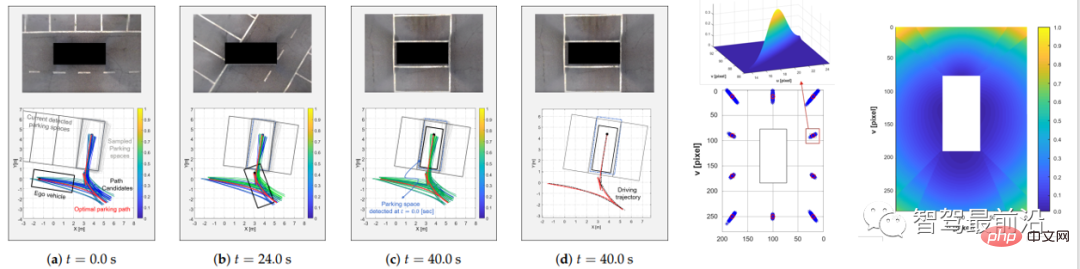
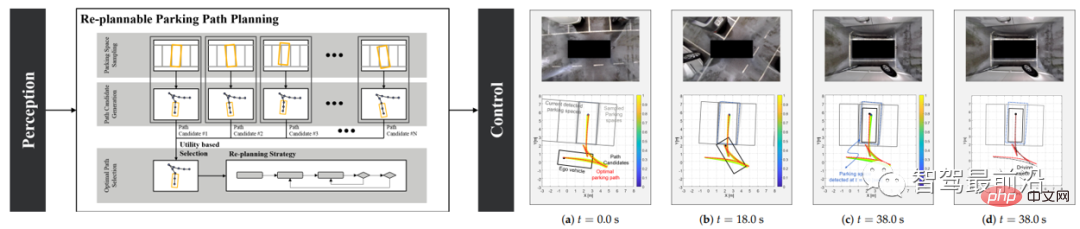
L'architecture globale du document est présentée dans l'image de gauche ci-dessous. L'effet de l'utilisation de cet algorithme est illustré dans l'image de droite ci-dessous.
Échantillonnage de l'espace de stationnement : échantillonnage des deux points d'angle les plus proches de l'ADC, traitement des points d'échantillonnage comme normalement distribués et calcul du point de stationnement au centre de l'essieu arrière de l'ADC en fonction des points d'angle d'échantillonnage et de la longueur de l'espace de stationnement défini
Génération de chemin candidat : utilisez la théorie ocp pour effectuer une planification de chemin pour chaque point d'échantillonnage, où le problème du domaine temporel est converti en système de coordonnées Ferent et SQP est utilisé pour résoudre le problème non linéaire
Sélection de chemin optimal : utilisez l'utilitaire ; théorie de l'optimisation Sélection du chemin. La fonction d'utilité est : EU(s) = P(s) x Uideal(s) +(1-P(s)) x Ureal(s), où P(s) est la probabilité du chemin correspondant au point d'échantillonnage, et Uideal est le chemin vers la valeur de la fonction utilitaire de déviation du point cible (détecté de manière sensorielle au moment actuel, non obtenu par échantillonnage), Ureal est la valeur de la fonction utilitaire sur le chemin vers la position actuelle de l'ADC.
2.3.3 Incertitude de prédiction
La prédiction est un élément important pour atteindre une conduite autonome de haut niveau au-dessus de L4. Cependant, à l’heure actuelle, la prévision reste un problème très difficile pour l’ensemble du secteur. Par conséquent, la précision de la prédiction est très faible et il est très important de planifier les mouvements dans un contexte d’incertitude des résultats de prédiction.
L'article [8] propose une architecture de planification basée sur la distribution gaussienne pour traiter le problème des trajectoires de planification dangereuses causées par l'incertitude de prédiction et de contrôle.
Génération de trajectoires de candidats : générée par un échantillonnage horizontal et vertical en plusieurs étapes. Cela peut être compris comme la méthode Aopllo Lattice.
Génération de trajectoire prévue : lors de la prévision (planification) de la trajectoire d'un certain véhicule, on considère que d'autres véhicules se déplacent à une vitesse constante et leur statut est déterminé, puis la prédiction optimale est obtenue en calculant le coût de la trajectoire candidate. trajectoire. La distribution de probabilité de la trajectoire prédite est ensuite calculée par filtrage de Kalman, en supposant qu'elle suit une distribution normale.
Génération de trajectoire ADC : à l'heure actuelle, l'incertitude des prédictions des autres participants au trafic doit être prise en compte. Pour chaque trajectoire candidate, l'erreur de contrôle est calculée via l'algorithme LQR, puis la distribution de probabilité de la trajectoire est calculée via le filtrage de Kalman. Lorsque le calcul du cos est effectué pour l'évaluation de la trajectoire, la détection de collision est basée sur la distribution de probabilité de la trajectoire prévue et. Les trajectoires planifiées par l'ADC, c'est-à-dire que les collisions ne peuvent se produire dans aucune distribution de probabilité.
L'auteur estime que cette méthode équivaut à ajouter un tampon adaptatif à la boîte, alors que le tampon conventionnel de taille fixe conduira à un comportement de conduite conservateur ou agressif.
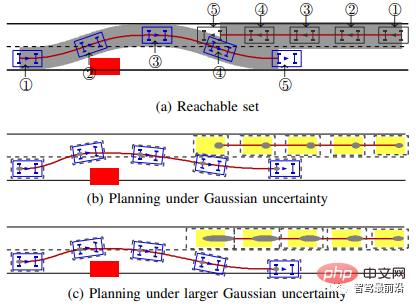
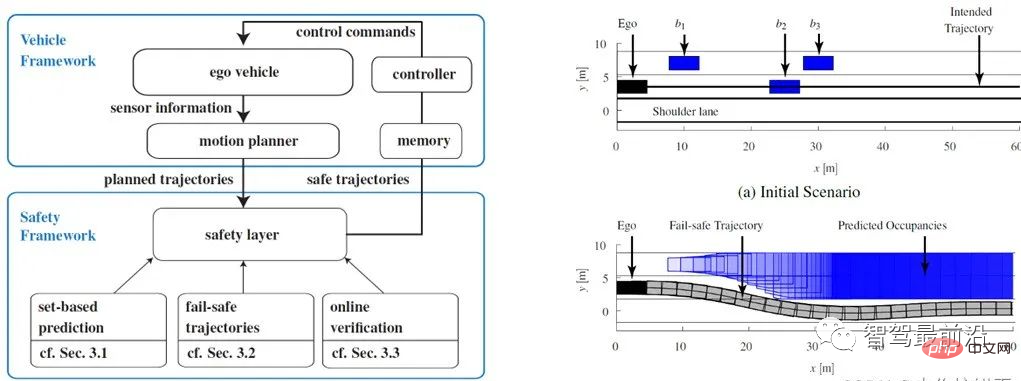
L'article [9] propose un mécanisme de sécurité qui peut être intégré dans le cadre de planification de mouvement existant, qui est divisé en trois parties :
Prédiction basée sur des ensembles : basée sur les stratégies de conduite formulées et les véhicules de participants à la circulation Le modèle cinématique transforme la trajectoire prévue unique d'origine des participants à la circulation en plusieurs trajectoires prédites :
Trajectoire à sécurité intégrée : sur la base des résultats de la prédiction, calculez le premier point de trajectoire avec risque de collision dans la trajectoire de planification d'origine, puis générez un trajectoire basée sur la théorie de l'optimisation ;
Vérification en ligne : projetez l'ADC sur la trajectoire générée dans la deuxième étape pour déterminer si elle entre en collision avec la trajectoire prévue du véhicule dans la première étape.
J'ai l'impression que cette méthode est une refonte de la planification de mouvement. Étant donné que le document ne décrit pas si la trajectoire de sécurité prend en compte les résultats de la décision, cela peut empêcher la trajectoire sûre de satisfaire les résultats de la décision. n'est qu'une simulation et n'a aucune application pratique.
2.3.4 Environnements partiellement observables
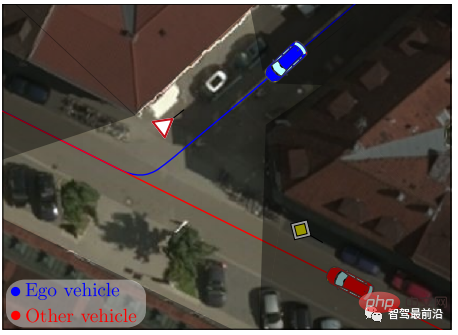
En raison de la portée de détection limitée du capteur lui-même et de l'incertitude des résultats de détection, il sera encore amplifié en cas de mauvais éclairage ou de mauvais temps. Dans des conditions de travail urbaines, l'occlusion des bâtiments entraînera une perception incomplète, comme le montre la figure ci-dessous. De plus, les gros véhicules peuvent également causer des problèmes d'occlusion perceptuelle, et la plupart des planifications de mouvement sont traitées avec une perception complète, de sorte que les résultats de la planification sont très dangereux.
L'article [10] propose une planification de mouvement sûre qui gère la perception incomplète, de sorte que la trajectoire planifiée puisse s'arrêter en toute sécurité sans collision sous la capacité de freinage maximale du véhicule dans les situations les plus dangereuses. Elle est divisée en deux situations : la première est celle de la conduite sur une route droite, en tenant compte de l'incertitude de la perception et de la plage de distance de perception, et la seconde celle de la conduite à une intersection urbaine, où la perception incomplète est prise en compte. Et il est facile à intégrer dans d'autres architectures de planification de mouvement. L'auteur a effectué une vérification par simulation dans la planification de trajectoire sur la base de la méthode d'optimisation proposée précédemment (Figure (b) dans la revue).
L'auteur a formulé plusieurs hypothèses pour sa théorie :
Les informations de position longitudinale et de vitesse de positionnement suivent la distribution gaussienne ;
La plage effective de perception est connue et le résultat de la perception suit la distribution gaussienne ; inclus L'emplacement du bâtiment, et c'est un polygone convexe ;
Utilisez le modèle de conducteur intelligent (IDM) pour prédire l'accélération du véhicule.
Étant donné que l'article traite de deux situations : les routes droites et les intersections, la reconnaissance de scène est requise. L'article utilise une approche basée sur des règles pour la reconnaissance de scène.

Image ci-dessus à gauche : La ligne pointillée rouge est le temps de percevoir l'environnement observé, et la ligne pointillée noire est le temps d'effectuer la planification de mouvement. On peut voir que la perception utilisée par Motion Planning L'information est antérieure à l'heure. De plus, comme Motion Planning doit assurer la continuité, la trajectoire planifiée au sein du cycle de calcul de Motion Planning tpin doit être cohérente. Plus important encore, en raison du retard de l'actionneur, la sécurité de la trajectoire doit être assurée dans le temps tsafe. Dans le journal, tsafe= 2tpin ;
Photo du haut et du milieu : La conduite sur une route droite est divisée en deux situations : aucun véhicule dans la plage de détection ou il y a des véhicules dans la plage de détection : Premièrement, il y a Il n'y a aucun véhicule dans la plage de détection, en supposant que la plage de détection de conduite Il y a un véhicule stationnaire à l'extérieur et qu'il est défini comme un obstacle stationnaire virtuel. Grâce à ses caractéristiques de distribution gaussienne, il peut être calculé pour satisfaire les contraintes de déplacement longitudinal et de vitesse de. freinage avec la capacité de freinage maximale dans le moment de sécurité ; deuxièmement, il y a un véhicule dans la plage de détection, considérer la situation la plus dangereuse en cas d'incertitude de perception, c'est-à-dire que le véhicule qui précède freine avec une capacité de freinage maximale grâce à ses caractéristiques de distribution gaussienne. , il peut être calculé pour satisfaire les contraintes de déplacement longitudinal et de vitesse de freinage avec une capacité de freinage maximale dans un délai de sécurité #🎜🎜 #
Image ci-dessus à droite : Conduite à une intersection, selon le modèle IDM, il est calculé si l'ADC doit céder le passage ou avoir la priorité et doit indiquer clairement son intention de dépasser en premier. Finalement converti en deux types de contraintes pour une conduite en ligne droite. 2.4 Agent uniqueL'agent unique considère qu'il s'agit d'un problème à agent unique, c'est-à-dire que l'ADC prendra des décisions concernant l'environnement sans tenir compte de l'impact de la décision de comportement de l'ADC sur Impact des autres participants au trafic, cette hypothèse est évidemment fausse, mais elle simplifie le problème de planification de mouvement. La prise de décision comportementale est un autre aspect important qui affecte le développement de la conduite autonome. À mesure que le niveau de conduite autonome augmente, la prise de décision comportementale devient plus importante. La difficulté de la prise de décision comportementale est de savoir comment incarner l’intelligence des véhicules autonomes et comment permettre aux véhicules autonomes de gérer des scénarios complexes de grande dimension et multicontraintes comme les conducteurs humains, ou même de mieux fonctionner que les conducteurs humains. La plupart des méthodes actuelles sont des méthodes basées sur des règles avec des capacités limitées. En termes de prise de décision comportementale basée sur la méthode des règles, dans des conditions de sortie de rampe, un seuil de distance depuis l'entrée de la rampe est généralement conçu. Lorsque la distance entre l'ADC et la rampe est inférieure au seuil, le changement de voie vers la voie la plus à droite commence. En supposant que ce seuil est de 2km, si l'ADC roule sur la voie du milieu à 2,1m de l'intersection de la rampe, qu'il y a une voiture devant et que la vitesse est faible, la décision comportementale basée sur des règles -faire choisira généralement d'aller vers la gauche. Changement de voie (la voie de gauche a une limite de vitesse élevée et les dépassements doivent suivre la voie de gauche. On peut voir sur Xiaopeng NGP et d'autres que la voie de gauche est prioritaire). Cependant, le seuil de distance jusqu'à l'entrée de la rampe après un changement de voie est inférieur à 2 km. À ce moment-là, il est nécessaire de changer de voie vers la voie la plus à droite, et il est nécessaire d'effectuer deux changements de voie consécutifs, ce qui ne semblera pas assez intelligent. Un autre exemple est de conduire dans la voie la plus à droite 500 m avant la rampe. Si la route devant vous ne peut pas être empruntée en raison de travaux ou d'un accident, le conducteur ne peut prendre le relais qu'à ce moment-là. On peut constater qu'en raison de la complexité des conditions de travail réelles, il est difficile d'obtenir une bonne expérience de conduite avec une méthode de prise de décision comportementale basée sur des règles. Le travail de prise de décision comportementale de l'Université des sciences et technologies de Hong Kong sur OPMDP [11] présente une certaine amélioration des performances par rapport à la méthode basée sur des règles. Il élague le comportement de l'ADC et des autres participants au trafic, réduction La consommation de temps d'OPMDP est réduite. Cependant, il prend en compte le fait que les autres participants au trafic éviteront le comportement de l'ADC, etc. On peut voir qu'il s'agit d'un problème à agents multiples à résoudre.2.5 Agent multiple
L'agent unique mentionné ci-dessus estime que les acteurs du trafic ne prendront pas de décisions correspondantes sur le comportement de l'ADC, mais. en réalité, lorsque l'ADC prend une décision, son comportement affectera le comportement des autres participants au trafic, réduisant ainsi la crédibilité des résultats de prédiction d'origine, en particulier certaines prédictions simples basées sur des règles qui ne s'appuient pas sur les résultats de la planification de mouvement ou n'utilisent pas le résultat. du cadre précédent Motion Planning (Apollo). Par exemple, dans l'image de gauche ci-dessous, lorsque l'ADC L suit la trajectoire 1, A2 peut ralentir pour l'éviter. Alors que l'ADC L suit la trajectoire 2, A2 peut accélérer jusqu'à l'intersection. Cependant, lorsque l'ADC L suit la trajectoire 2, il est prévu que A2 puisse accélérer à travers l'intersection, mais A2 peut mal comprendre l'intention de l'ADC L et ralentir, provoquant le blocage des deux véhicules. Par conséquent, la manière dont l’ADC comprend les intentions des autres participants au trafic et la manière dont les autres véhicules de la circulation comprennent les intentions de l’ADC est cruciale [12].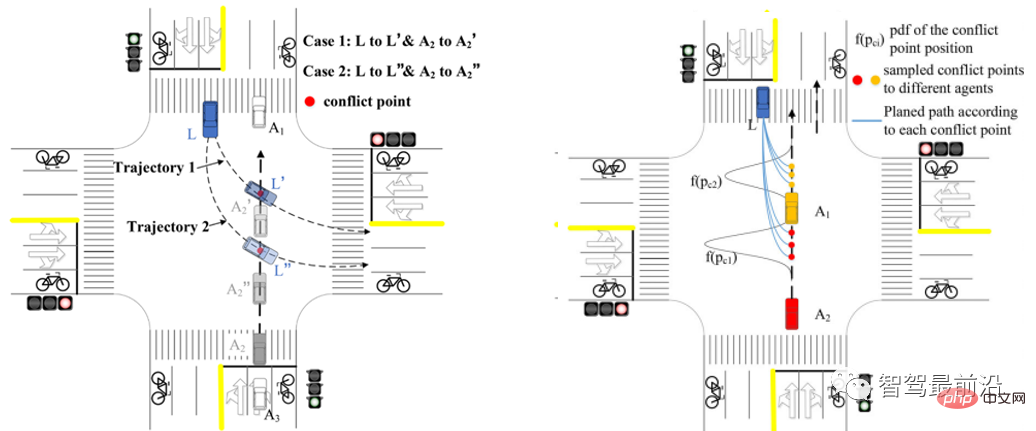
Temps réel : Le problème d'optimalité évoqué dans la première question. S'il doit être résolu, en raison de la complexité des calculs de recherche dans l'espace tridimensionnel, ses performances en temps réel peuvent être garanties. l'application d'une planification spatio-temporelle commune . De plus, les contraintes à grande échelle et la non-linéarité de l’algorithme d’optimisation sont également confrontées à des défis en temps réel.
Exhaustivité : les algorithmes tels que l'interpolation et le treillis sont probabilistement complets, en particulier dans les environnements complexes multi-obstacles, il est difficile d'obtenir une trajectoire sans collision avec un échantillonnage limité. La méthode d'optimisation ne peut pas être complète en raison de la solution numérique, et le solveur osqp couramment utilisé peut même donner une solution incorrecte.
Difficile à quantifier : La plupart des indicateurs d'évaluation dans Motion Planning sont subjectifs, comme le confort et la praticabilité, etc., qui sont difficiles à évaluer quantitativement. Différents ingénieurs ajustent les paramètres pour obtenir différentes sensations corporelles, qui sont également différentes des sensations subjectives des passagers. Par conséquent, des méthodes d'apprentissage automatique sont proposées pour apprendre des paramètres ou des stratégies de changement de voie dans la planification de mouvement.
En réponse aux problèmes et défis ci-dessus, les entreprises du secteur explorent également activement et proposent des solutions, dont certaines sont répertoriées ci-dessous.
Qingzhou Zhihang utilise la planification conjointe espace-temps pour résoudre le problème d'optimalité, améliorer les performances de planification et développe un planificateur non linéaire auto-développé pour une solution efficace [2].
Dans le cadre de nouvelle génération de TuSimple, lorsqu'il fournit des informations telles que l'emplacement et la vitesse des obstacles, le module de perception fournit également des informations sur l'incertitude ou la probabilité pour garantir que la planification décisionnelle peut prendre des décisions sûres et confortables à l'avance [13].
Tesla utilise un planificateur pour d'autres véhicules pour les usagers de la circulation. Cependant, lors de l'interaction avec d'autres véhicules, la planification ne doit pas être réservée uniquement à l'ADC, mais doit être planifiée conjointement pour tous les acteurs de la circulation et optimisée pour le flux de circulation de l'ensemble de la scène. Pour ce faire, le planificateur de pilote automatique est exécuté pour chaque objet participant à la scène. De plus, pour les scénarios de stationnement, l'algorithme de recherche A et la stratégie de combinaison de réseaux neuronaux sont utilisés, ce qui réduit considérablement l'exploration des nœuds de l'algorithme A [15].
Xpeng et Tesla ont optimisé le problème des lignes de voie manquantes et des changements de topologie routière [14].
Waymo a proposé ChauffeurNet pour améliorer les performances de prise de décision [16], et Apollo a proposé sa propre architecture d'apprentissage par renforcement [17] basée sur ChauffeurNet.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 Tim mobile en ligne
Tim mobile en ligne
 Fichier au format DAT
Fichier au format DAT
 Quel est le codage utilisé à l'intérieur d'un ordinateur pour traiter les données et les instructions ?
Quel est le codage utilisé à l'intérieur d'un ordinateur pour traiter les données et les instructions ?
 Comment installer Pycharm
Comment installer Pycharm
 Utilisation de la fonction get en langage C
Utilisation de la fonction get en langage C
 Pourquoi le wifi a-t-il un point d'exclamation ?
Pourquoi le wifi a-t-il un point d'exclamation ?
 Que signifie l'accès au réseau refusé au wifi ?
Que signifie l'accès au réseau refusé au wifi ?
 Méthodes courantes en cours de mathématiques
Méthodes courantes en cours de mathématiques








![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



