


Comment utiliser YOLO V12 pour la détection d'objets?

YOLO (You Only Look Once) has been a leading real-time object detection framework, with each iteration improving upon the previous versions. The latest version YOLO v12 introduces advancements that significantly enhance accuracy while maintaining real-time processing speeds. This article explores the key innovations in YOLO v12, highlighting how it surpasses the previous versions while minimizing computational costs without compromising detection efficiency.
Table of contents
- What’s New in YOLO v12?
- Key Improvements Over Previous Versions
- Computational Efficiency Enhancements
- YOLO v12 Model Variants
- Let’s compare YOLO v11 and YOLO v12 Models
- Expert Opinions on YOLOv11 and YOLOv12
- Conclusion
What’s New in YOLO v12?
Previously, YOLO models relied on Convolutional Neural Networks (CNNs) for object detection due to their speed and efficiency. However, YOLO v12 makes use of attention mechanisms, a concept widely known and used in Transformer models which allow it to recognize patterns more effectively. While attention mechanisms have originally been slow for real-time object detection, YOLO v12 somehow successfully integrates them while maintaining YOLO’s speed, leading to an Attention-Centric YOLO framework.
Key Improvements Over Previous Versions
1. Attention-Centric Framework
YOLO v12 combines the power of attention mechanisms with CNNs, resulting in a model that is both faster and more accurate. Unlike its predecessors which relied solely on CNNs, YOLO v12 introduces optimized attention modules to improve object recognition without adding unnecessary latency.
2. Superior Performance Metrics
Comparing performance metrics across different YOLO versions and real-time detection models reveals that YOLO v12 achieves higher accuracy while maintaining low latency.
- The mAP (Mean Average Precision) values on datasets like COCO show YOLO v12 outperforming YOLO v11 and YOLO v10 while maintaining comparable speed.
- The model achieves a remarkable 40.6% accuracy (mAP) while processing images in just 1.64 milliseconds on an Nvidia T4 GPU. This performance is superior to YOLO v10 and YOLO v11 without sacrificing speed.
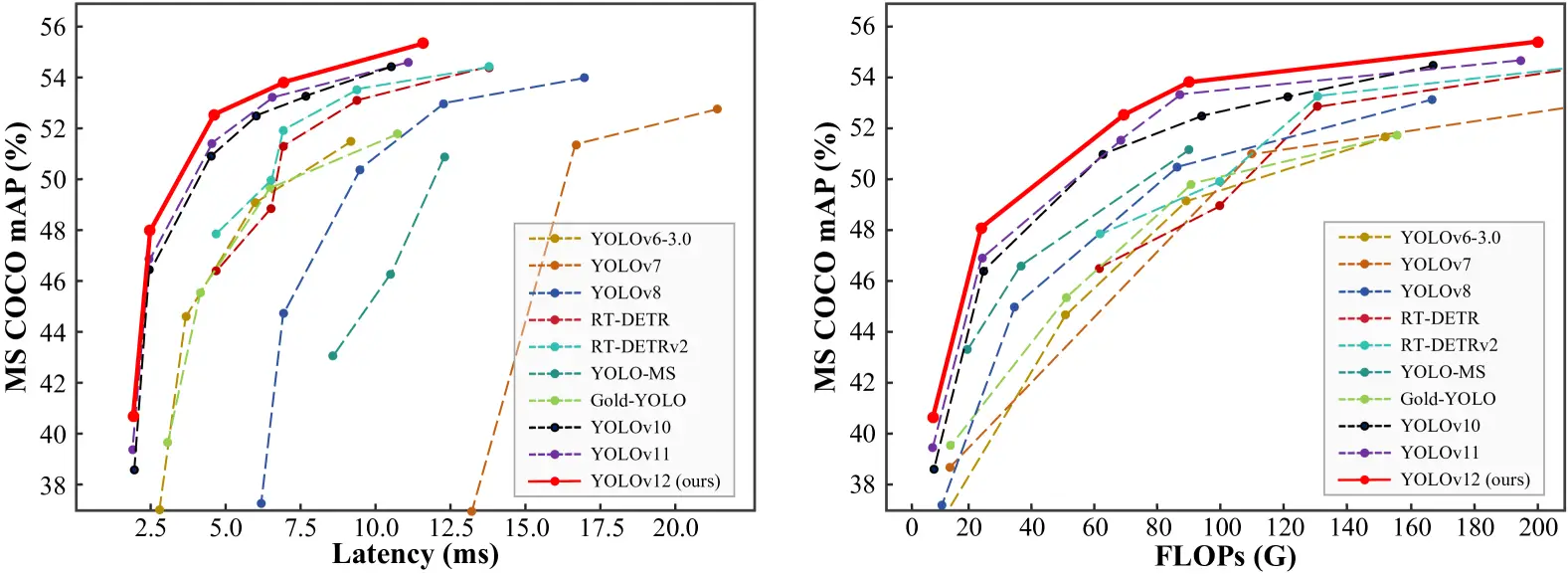
3. Outperforming Non-YOLO Models
YOLO v12 surpasses previous YOLO versions; it also outperforms other real-time object detection frameworks, such as RT-Det and RT-Det v2. These alternative models have higher latency yet fail to match YOLO v12’s accuracy.
Computational Efficiency Enhancements
One of the major concerns with integrating attention mechanisms into YOLO models was their high computational cost (Attention Mechanism) and memory inefficiency. YOLO v12 addresses these issues through several key innovations:
1. Flash Attention for Memory Efficiency
Traditional attention mechanisms consume a large amount of memory, making them impractical for real-time applications. YOLO v12 introduces Flash Attention, a technique that reduces memory consumption and speeds up inference time.
2. Area Attention for Lower Computation Cost
To further optimize efficiency, YOLO v12 employs Area Attention, which focuses only on relevant regions of an image instead of processing the entire feature map. This technique dramatically reduces computation costs while retaining accuracy.

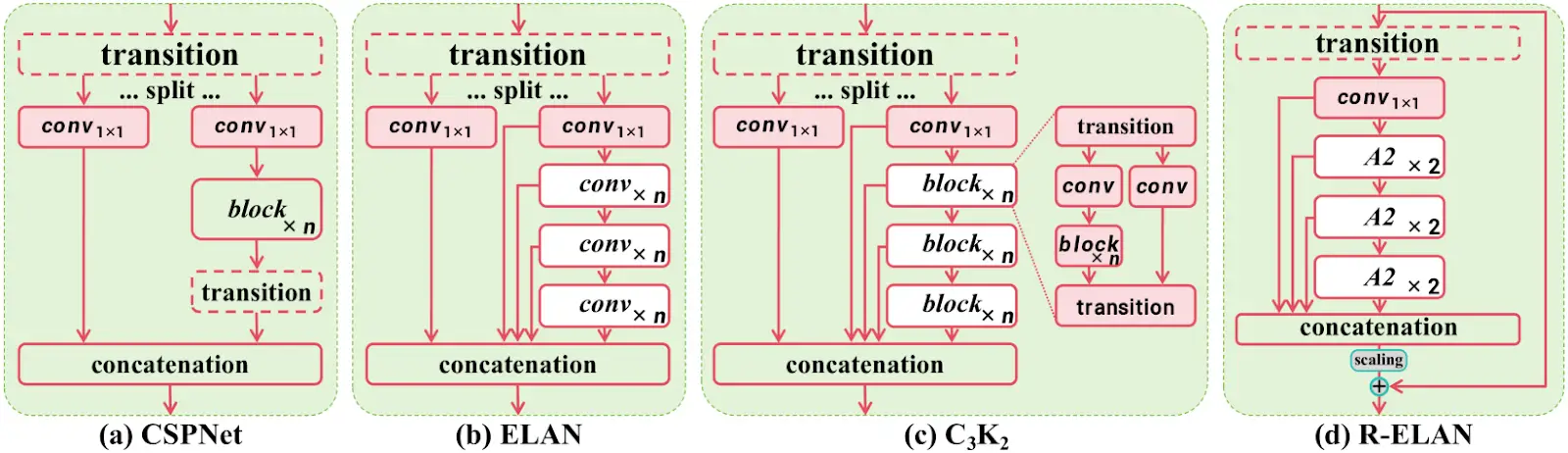
3. R-ELAN for Optimized Feature Processing
YOLO v12 also introduces R-ELAN (Re-Engineered ELAN), which optimizes feature propagation making the model more efficient in handling complex object detection tasks without increasing computational demands.
YOLO v12 Model Variants
YOLO v12 comes in five different variants, catering to different applications:
- N (Nano) & S (Small): Designed for real-time applications where speed is crucial.
- M (Medium): Balances accuracy and speed, suitable for general-purpose tasks.
- L (Large) & XL (Extra Large): Optimized for high-precision tasks where accuracy is prioritized over speed.
Also read:
- A Step-by-Step Introduction to the Basic Object Detection Algorithms (Part 1)
- A Practical Implementation of the Faster R-CNN Algorithm for Object Detection (Part 2)
- A Practical Guide to Object Detection using the Popular YOLO Framework – Part III (with Python codes)
Let’s compare YOLO v11 and YOLO v12 Models
We’ll be experimenting with YOLO v11 and YOLO v12 small models to understand their performance across various tasks like object counting, heatmaps, and speed estimation.
1. Object Counting
YOLO v11
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("highway.mp4")
assert cap.isOpened(), "Error reading video file"
w, h, fps = (int(cap.get(cv2.CAP_PROP_FRAME_WIDTH)), int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT)), int(cap.get(cv2.CAP_PROP_FPS)))
# Define region points
region_points = [(20, 1500), (1080, 1500), (1080, 1460), (20, 1460)] # Lower rectangle region counting
# Video writer (MP4 format)
video_writer = cv2.VideoWriter("object_counting_output.mp4", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Init ObjectCounter
counter = solutions.ObjectCounter(
show=False, # Disable internal window display
region=region_points,
model="yolo11s.pt",
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or video processing has been successfully completed.")
break
im0 = counter.count(im0)
# Resize to fit screen (optional — scale down for large videos)
im0_resized = cv2.resize(im0, (640, 360)) # Adjust resolution as needed
# Show the resized frame
cv2.imshow("Object Counting", im0_resized)
video_writer.write(im0)
# Press 'q' to exit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
video_writer.release()
cv2.destroyAllWindows()
Output
YOLO v12
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("highway.mp4")
assert cap.isOpened(), "Error reading video file"
w, h, fps = (int(cap.get(cv2.CAP_PROP_FRAME_WIDTH)), int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT)), int(cap.get(cv2.CAP_PROP_FPS)))
# Define region points
region_points = [(20, 1500), (1080, 1500), (1080, 1460), (20, 1460)] # Lower rectangle region counting
# Video writer (MP4 format)
video_writer = cv2.VideoWriter("object_counting_output.mp4", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Init ObjectCounter
counter = solutions.ObjectCounter(
show=False, # Disable internal window display
region=region_points,
model="yolo12s.pt",
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or video processing has been successfully completed.")
break
im0 = counter.count(im0)
# Resize to fit screen (optional — scale down for large videos)
im0_resized = cv2.resize(im0, (640, 360)) # Adjust resolution as needed
# Show the resized frame
cv2.imshow("Object Counting", im0_resized)
video_writer.write(im0)
# Press 'q' to exit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
video_writer.release()
cv2.destroyAllWindows()
Output
2. Heatmaps
YOLO v11
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("mall_arial.mp4")
assert cap.isOpened(), "Error reading video file"
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
# Video writer
video_writer = cv2.VideoWriter("heatmap_output_yolov11.mp4", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# In case you want to apply object counting + heatmaps, you can pass region points.
# region_points = [(20, 400), (1080, 400)] # Define line points
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360)] # Define region points
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360), (20, 400)] # Define polygon points
# Init heatmap
heatmap = solutions.Heatmap(
show=True, # Display the output
model="yolo11s.pt", # Path to the YOLO11 model file
colormap=cv2.COLORMAP_PARULA, # Colormap of heatmap
# region=region_points, # If you want to do object counting with heatmaps, you can pass region_points
# classes=[0, 2], # If you want to generate heatmap for specific classes i.e person and car.
# show_in=True, # Display in counts
# show_out=True, # Display out counts
# line_width=2, # Adjust the line width for bounding boxes and text display
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or video processing has been successfully completed.")
break
im0 = heatmap.generate_heatmap(im0)
im0_resized = cv2.resize(im0, (w, h))
video_writer.write(im0_resized)
cap.release()
video_writer.release()
cv2.destroyAllWindows()
Output
YOLO v12
import cv2
from ultralytics import solutions
cap = cv2.VideoCapture("mall_arial.mp4")
assert cap.isOpened(), "Error reading video file"
w, h, fps = (int(cap.get(x)) for x in (cv2.CAP_PROP_FRAME_WIDTH, cv2.CAP_PROP_FRAME_HEIGHT, cv2.CAP_PROP_FPS))
# Video writer
video_writer = cv2.VideoWriter("heatmap_output_yolov12.mp4", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# In case you want to apply object counting + heatmaps, you can pass region points.
# region_points = [(20, 400), (1080, 400)] # Define line points
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360)] # Define region points
# region_points = [(20, 400), (1080, 400), (1080, 360), (20, 360), (20, 400)] # Define polygon points
# Init heatmap
heatmap = solutions.Heatmap(
show=True, # Display the output
model="yolo12s.pt", # Path to the YOLO11 model file
colormap=cv2.COLORMAP_PARULA, # Colormap of heatmap
# region=region_points, # If you want to do object counting with heatmaps, you can pass region_points
# classes=[0, 2], # If you want to generate heatmap for specific classes i.e person and car.
# show_in=True, # Display in counts
# show_out=True, # Display out counts
# line_width=2, # Adjust the line width for bounding boxes and text display
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or video processing has been successfully completed.")
break
im0 = heatmap.generate_heatmap(im0)
im0_resized = cv2.resize(im0, (w, h))
video_writer.write(im0_resized)
cap.release()
video_writer.release()
cv2.destroyAllWindows()
Output
3. Speed Estimation
YOLO v11
import cv2
from ultralytics import solutions
import numpy as np
cap = cv2.VideoCapture("cars_on_road.mp4")
assert cap.isOpened(), "Error reading video file"
# Capture video properties
w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = int(cap.get(cv2.CAP_PROP_FPS))
# Video writer
video_writer = cv2.VideoWriter("speed_management_yolov11.mp4", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Define speed region points (adjust for your video resolution)
speed_region = [(300, h - 200), (w - 100, h - 200), (w - 100, h - 270), (300, h - 270)]
# Initialize SpeedEstimator
speed = solutions.SpeedEstimator(
show=False, # Disable internal window display
model="yolo11s.pt", # Path to the YOLO model file
region=speed_region, # Pass region points
# classes=[0, 2], # Optional: Filter specific object classes (e.g., cars, trucks)
# line_width=2, # Optional: Adjust the line width
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or video processing has been successfully completed.")
break
# Estimate speed and draw bounding boxes
out = speed.estimate_speed(im0)
# Draw the speed region on the frame
cv2.polylines(out, [np.array(speed_region)], isClosed=True, color=(0, 255, 0), thickness=2)
# Resize the frame to fit the screen
im0_resized = cv2.resize(out, (1280, 720)) # Resize for better screen fit
# Show the resized frame
cv2.imshow("Speed Estimation", im0_resized)
video_writer.write(out)
# Press 'q' to exit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
video_writer.release()
cv2.destroyAllWindows()
Output
YOLO v12
import cv2
from ultralytics import solutions
import numpy as np
cap = cv2.VideoCapture("cars_on_road.mp4")
assert cap.isOpened(), "Error reading video file"
# Capture video properties
w = int(cap.get(cv2.CAP_PROP_FRAME_WIDTH))
h = int(cap.get(cv2.CAP_PROP_FRAME_HEIGHT))
fps = int(cap.get(cv2.CAP_PROP_FPS))
# Video writer
video_writer = cv2.VideoWriter("speed_management_yolov12.mp4", cv2.VideoWriter_fourcc(*"mp4v"), fps, (w, h))
# Define speed region points (adjust for your video resolution)
speed_region = [(300, h - 200), (w - 100, h - 200), (w - 100, h - 270), (300, h - 270)]
# Initialize SpeedEstimator
speed = solutions.SpeedEstimator(
show=False, # Disable internal window display
model="yolo12s.pt", # Path to the YOLO model file
region=speed_region, # Pass region points
# classes=[0, 2], # Optional: Filter specific object classes (e.g., cars, trucks)
# line_width=2, # Optional: Adjust the line width
)
# Process video
while cap.isOpened():
success, im0 = cap.read()
if not success:
print("Video frame is empty or video processing has been successfully completed.")
break
# Estimate speed and draw bounding boxes
out = speed.estimate_speed(im0)
# Draw the speed region on the frame
cv2.polylines(out, [np.array(speed_region)], isClosed=True, color=(0, 255, 0), thickness=2)
# Resize the frame to fit the screen
im0_resized = cv2.resize(out, (1280, 720)) # Resize for better screen fit
# Show the resized frame
cv2.imshow("Speed Estimation", im0_resized)
video_writer.write(out)
# Press 'q' to exit
if cv2.waitKey(1) & 0xFF == ord('q'):
break
cap.release()
video_writer.release()
cv2.destroyAllWindows()
Output
Also Read: Top 30+ Computer Vision Models For 2025
Expert Opinions on YOLOv11 and YOLOv12
Muhammad Rizwan Munawar — Computer Vision Engineer at Ultralytics
“YOLOv12 introduces flash attention, which enhances accuracy, but it requires careful CUDA setup. It’s a solid step forward, especially for complex detection tasks, though YOLOv11 remains faster for real-time needs. In short, choose YOLOv12 for accuracy and YOLOv11 for speed.”
Linkedin Post – Is YOLOv12 really a state-of-the-art model? ?
Muhammad Rizwan, recently tested YOLOv11 and YOLOv12 side by side to break down their real-world performance. His findings highlight the trade-offs between the two models:
- Frames Per Second (FPS): YOLOv11 maintains an average of 40 FPS, while YOLOv12 lags behind at 30 FPS. This makes YOLOv11 the better choice for real-time applications where speed is critical, such as traffic monitoring or live video feeds.
- Training Time: YOLOv12 takes about 20% longer to train than YOLOv11. On a small dataset with 130 training images and 43 validation images, YOLOv11 completed training in 0.009 hours, while YOLOv12 needed 0.011 hours. While this might seem minor for small datasets, the difference becomes significant for larger-scale projects.
- Accuracy: Both models achieved similar accuracy after fine-tuning for 10 epochs on the same dataset. YOLOv12 didn’t dramatically outperform YOLOv11 in terms of accuracy, suggesting the newer model’s improvements lie more in architectural enhancements than raw detection precision.
- Flash Attention: YOLOv12 introduces flash attention, a powerful mechanism that speeds up and optimizes attention layers. However, there’s a catch — this feature isn’t natively supported on the CPU, and enabling it with CUDA requires careful version-specific setup. For teams without powerful GPUs or those working on edge devices, this can become a roadblock.
The PC specifications used for testing:
- GPU: NVIDIA RTX 3050
- CPU: Intel Core-i5-10400 @2.90GHz
- RAM: 64 GB
The model specifications:
- Model = YOLO11n.pt and YOLOv12n.pt
- Image size = 640 for inference
Conclusion
YOLO v12 marks a significant leap forward in real-time object detection, combining CNN speed with Transformer-like attention mechanisms. With improved accuracy, lower computational costs, and a range of model variants, YOLO v12 is poised to redefine the landscape of real-time vision applications. Whether for autonomous vehicles, security surveillance, or medical imaging, YOLO v12 sets a new standard for real-time object detection efficiency.
What’s Next?
- YOLO v13 Possibilities: Will future versions push the attention mechanisms even further?
- Edge Device Optimization: Can Flash Attention or Area Attention be optimized for lower-power devices?
To help you better understand the differences, I’ve attached some code snippets and output results in the comparison section. These examples illustrate how both YOLOv11 and YOLOv12 perform in real-world scenarios, from object counting to speed estimation and heatmaps. I’m excited to see how you guys perceive this new release! Are the improvements in accuracy and attention mechanisms enough to justify the trade-offs in speed? Or do you think YOLOv11 still holds its ground for most applications?
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!

Outils d'IA chauds

Undress AI Tool
Images de déshabillage gratuites

Undresser.AI Undress
Application basée sur l'IA pour créer des photos de nu réalistes

AI Clothes Remover
Outil d'IA en ligne pour supprimer les vêtements des photos.

Clothoff.io
Dissolvant de vêtements AI

Video Face Swap
Échangez les visages dans n'importe quelle vidéo sans effort grâce à notre outil d'échange de visage AI entièrement gratuit !

Article chaud
Outils chauds

Bloc-notes++7.3.1
Éditeur de code facile à utiliser et gratuit

SublimeText3 version chinoise
Version chinoise, très simple à utiliser

Envoyer Studio 13.0.1
Puissant environnement de développement intégré PHP

Dreamweaver CS6
Outils de développement Web visuel

SublimeText3 version Mac
Logiciel d'édition de code au niveau de Dieu (SublimeText3)
Sujets chauds



 L'investisseur de l'IA est resté à l'arrêt? 3 chemins stratégiques pour acheter, construire ou s'associer avec les fournisseurs d'IA
Jul 02, 2025 am 11:13 AM
L'investisseur de l'IA est resté à l'arrêt? 3 chemins stratégiques pour acheter, construire ou s'associer avec les fournisseurs d'IA
Jul 02, 2025 am 11:13 AM
L'investissement est en plein essor, mais le capital seul ne suffit pas. Avec la montée et la décoloration des évaluations, les investisseurs dans les fonds de capital-risque axés sur l'IA doivent prendre une décision clé: acheter, construire ou partenaire pour gagner un avantage? Voici comment évaluer chaque option et PR
 AGI et AI Superintelligence vont fortement frapper la barrière d'hypothèse du plafond humain
Jul 04, 2025 am 11:10 AM
AGI et AI Superintelligence vont fortement frapper la barrière d'hypothèse du plafond humain
Jul 04, 2025 am 11:10 AM
Parlons-en. Cette analyse d'une percée innovante de l'IA fait partie de ma couverture de colonne Forbes en cours sur les dernières personnes en IA, notamment en identifiant et en expliquant diverses complexités d'IA percutantes (voir le lien ici). Se dirigeant vers Agi et
 Kimi K2: le modèle agentique open source le plus puissant
Jul 12, 2025 am 09:16 AM
Kimi K2: le modèle agentique open source le plus puissant
Jul 12, 2025 am 09:16 AM
Rappelez-vous le flot de modèles chinois open source qui a perturbé l'industrie du Genai plus tôt cette année? Alors que Deepseek a fait la majeure partie des titres, Kimi K1.5 était l'un des noms importants de la liste. Et le modèle était assez cool.
 Prévision future d'une explosion de renseignement massive sur la voie de l'IA à AGI
Jul 02, 2025 am 11:19 AM
Prévision future d'une explosion de renseignement massive sur la voie de l'IA à AGI
Jul 02, 2025 am 11:19 AM
Parlons-en. Cette analyse d'une percée innovante de l'IA fait partie de ma couverture de colonne Forbes en cours sur les dernières personnes en IA, notamment en identifiant et en expliquant diverses complexités d'IA percutantes (voir le lien ici). Pour ces lecteurs qui h
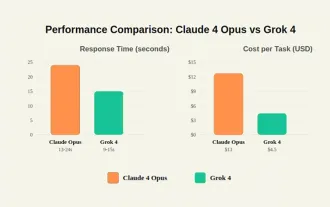 Grok 4 vs Claude 4: Quel est le meilleur?
Jul 12, 2025 am 09:37 AM
Grok 4 vs Claude 4: Quel est le meilleur?
Jul 12, 2025 am 09:37 AM
À la mi-2025, l'AI «Arme Race» se réchauffe, et Xai et Anthropic ont tous deux publié leurs modèles phares, Grok 4 et Claude 4.
 Chaîne de pensée pour le raisonnement Les modèles peuvent ne pas fonctionner à long terme
Jul 02, 2025 am 11:18 AM
Chaîne de pensée pour le raisonnement Les modèles peuvent ne pas fonctionner à long terme
Jul 02, 2025 am 11:18 AM
Par exemple, si vous posez une question à un modèle comme: "Que fait (x) personne à (x) l'entreprise?" Vous pouvez voir une chaîne de raisonnement qui ressemble à quelque chose comme ceci, en supposant que le système sait comment récupérer les informations nécessaires: localiser les détails sur le CO
 Cette startup a construit un hôpital en Inde pour tester son logiciel AI
Jul 02, 2025 am 11:14 AM
Cette startup a construit un hôpital en Inde pour tester son logiciel AI
Jul 02, 2025 am 11:14 AM
Les essais cliniques sont un énorme goulot d'étranglement du développement de médicaments, et Kim et Reddy pensaient que le logiciel compatible AI qu'ils avait construit chez PI Health pourrait les aider à les faire plus rapidement et moins cher en élargissant le bassin de patients potentiellement éligibles. Mais le
 Le Sénat tue l'interdiction de l'IA au niveau de l'État à 10 ans niché dans le projet de loi budgétaire de Trump
Jul 02, 2025 am 11:16 AM
Le Sénat tue l'interdiction de l'IA au niveau de l'État à 10 ans niché dans le projet de loi budgétaire de Trump
Jul 02, 2025 am 11:16 AM
Le Sénat a voté le 99-1 mardi matin pour tuer le moratoire après un tumulte de dernière minute de groupes de défense des groupes de défense, des législateurs et des dizaines de milliers d'Américains qui l'ont vu comme une dangereuse dépassement. Ils ne sont pas restés silencieux. Le Sénat écouté.
