


Avec les grands modèles comme bénédiction intelligente, les robots humanoïdes sont devenus une nouvelle tendance.
Le robot du film de science-fiction "je peux dire que je ne suis pas un humain" semble se rapprocher.
Cependant, penser et agir comme des humains reste un problème d'ingénierie difficile pour les robots, en particulier les robots humanoïdes.
Prenons comme exemple un simple apprentissage de la marche. L'utilisation de l'apprentissage par renforcement pour s'entraîner peut évoluer vers ce qui suit :

Il n'y a aucun problème en théorie (en suivant le mécanisme de récompense), et l'objectif d'y aller. monter les escaliers a été atteint, sauf que le processus est relativement abstrait, il peut ne pas être le même que la plupart des modèles de comportement humain.
La raison pour laquelle il est difficile pour les robots d'agir « naturellement » comme les humains est due à la nature de haute dimension de l'espace d'observation et d'action, et à l'instabilité inhérente à la forme bipède.
À cet égard, un travail auquel LeCun a participé a donné une nouvelle solution basée sur les données.
Adresse en papier: https://arxiv.org/pdf/2405.18418
project Introduction: https://nicklashanansen.com/rlpuppeteer
look à l'efficacité d'abord:

En comparant l'effet de droite, la nouvelle méthode a entraîné des comportements plus proches des humains. Bien qu'elle ait une signification un peu "zombie", le niveau d'abstraction a été considérablement réduit, du moins dans la limite des capacités de. la plupart des humains.
Bien sûr, certains internautes venus semer le trouble ont déclaré : "Celui d'avant avait l'air plus intéressant."
Dans ce travail, les chercheurs explorent une approche de contrôle humanoïde visuel du corps entier, hautement basée sur les données, basée sur l'apprentissage par renforcement sans aucune hypothèse simplificatrice, conception de récompense ou primitive de compétence.
L'auteur a proposé un modèle mondial hiérarchique pour former deux agents, de haut niveau et de bas niveau. L'agent de haut niveau génère des commandes basées sur des observations visuelles que l'agent de bas niveau doit exécuter.
Code source ouvert : https://github.com/nicklashansen/puppeteer
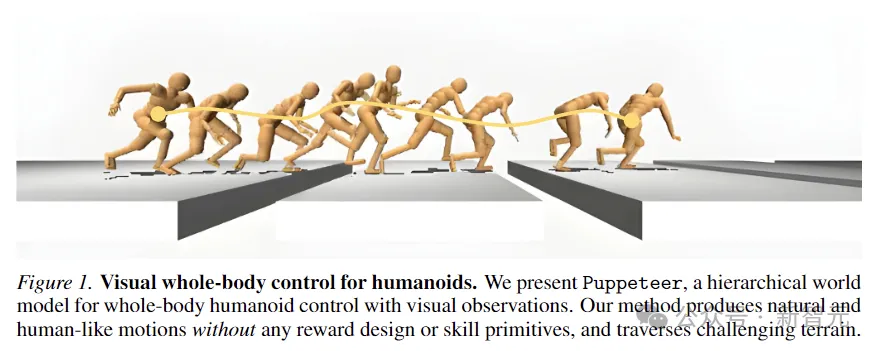
Ce modèle, nommé Puppeteer, utilise un robot humanoïde simulé à 56 DoF pour générer des performances élevées dans 8 tâches Stratégies de contrôle des performances tout en synthétisant les mouvements naturels de type humain et la capacité de traverser des terrains difficiles.

L'apprentissage et la formation d'agents polyvalents dans le monde physique ont toujours été l'un des objectifs de la recherche dans le domaine de l'IA.
Les robots humanoïdes peuvent effectuer diverses tâches en intégrant le contrôle et la perception de l'ensemble du corps, ils se distinguent donc comme des plates-formes multifonctionnelles.
Mais le coût de l'imitation d'animaux avancés comme nous reste très élevé.
Par exemple, dans l'image ci-dessous, afin d'éviter d'entrer dans les fosses, le robot humanoïde doit détecter avec précision la position et la longueur de l'espace au sol venant en sens inverse, et en même temps coordonner soigneusement les mouvements de tout son corps afin que il a suffisamment d’élan et de portée pour franchir chaque écart.
Puppeteer est une méthode RL basée sur les données et basée sur le modèle mondial hiérarchique JEPA proposé par LeCun en 2022.
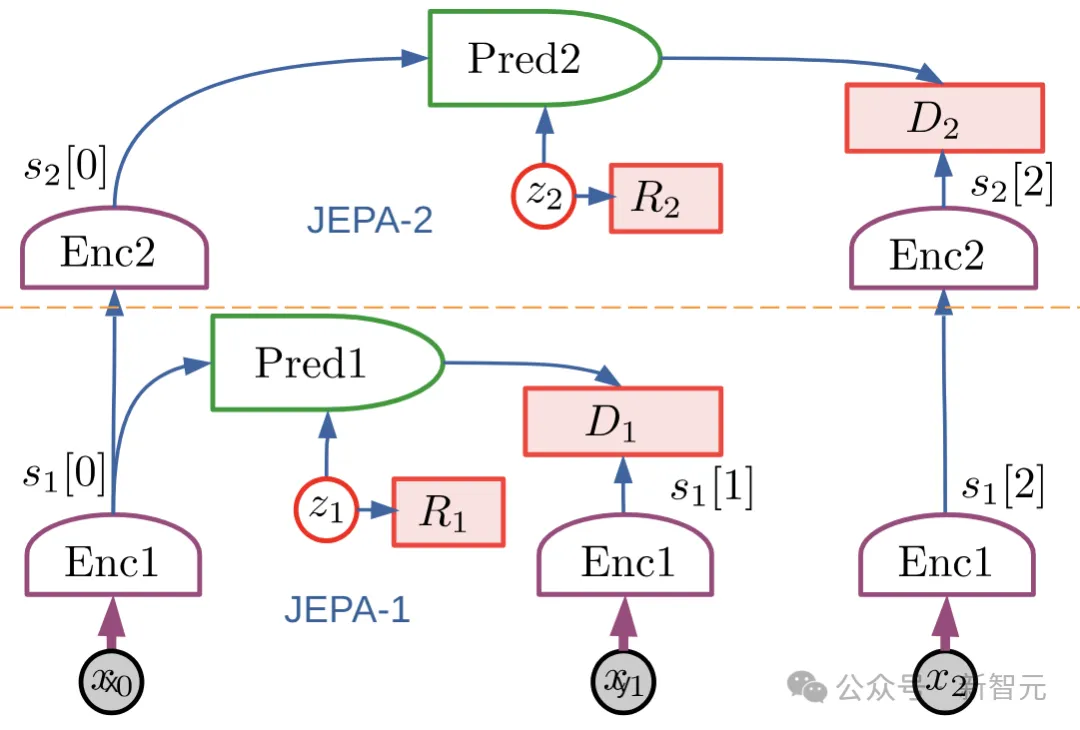
Il se compose de deux agents différents : l'un est responsable de la perception et du suivi, en suivant le mouvement de référence via un contrôle au niveau des articulations ; l'autre "marionnette visuelle" (marionnettiste) apprend à effectuer des tâches en aval en synthétisant un mouvement de référence de faible dimension, qui est l'ancien support de suivi.
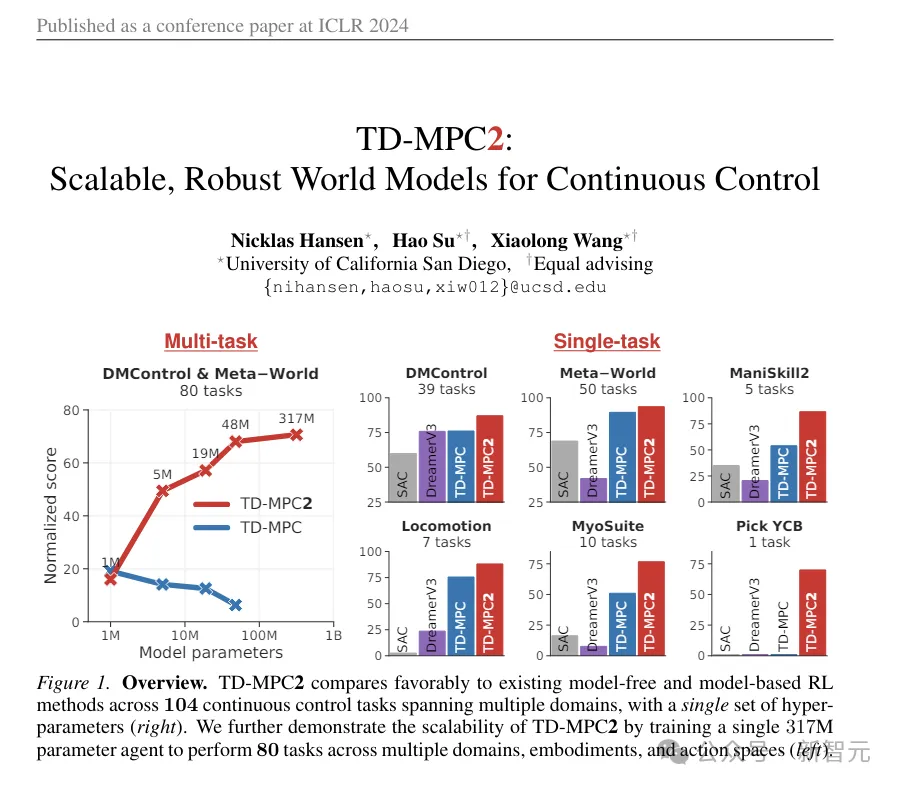
Puppeteer utilise l'algorithme RL basé sur un modèle-TD-MPC2 pour former indépendamment deux agents en deux étapes différentes.
(ps : Ce TD-MPC2 est l'image animée utilisée à titre de comparaison au début de l'article. Bien qu'elle semble un peu abstraite, il s'agit en fait du SOTA précédent, publié dans l'ICLR de cette année, et le premier travail est également le premier travail de cet article.)
Dans la première étape, le modèle mondial de suivi est d'abord pré-entraîné, en utilisant des données de capture de mouvement humain préexistantes comme référence pour convertir le mouvement en actions physiquement exécutables. . Cet agent peut être enregistré et réutilisé dans toutes les tâches en aval.
Dans la deuxième étape, un modèle de monde de marionnettes est formé, qui prend des observations visuelles en entrée et intègre le mouvement de référence fourni par un autre agent en sortie selon la tâche en aval spécifiée.
Ce cadre semble très simple : les deux modèles mondiaux sont algorithmiquement identiques, seulement différents en entrée/sortie, et sont formés à l'aide de RL sans aucune autre cloche et sifflet.
Différent des paramètres RL hiérarchiques traditionnels, "Puppet" affiche les positions géométriques des articulations effectrices terminales plutôt que l'intégration de la cible.
Cela rend l'agent responsable du suivi facile à partager et à généraliser entre les tâches, économisant ainsi de l'espace informatique global.
Les chercheurs ont modélisé le contrôle humanoïde visuel du corps entier comme un problème d'apprentissage par renforcement contrôlé par un processus de décision de Markov (MDP), basé sur le tuple (S, A, T, R, γ , Δ) sont des caractéristiques,
où S est l'état, A est l'action, T est la fonction de transition d'environnement, R est la fonction de récompense scalaire, γ est le facteur d'actualisation et Δ est la condition de terminaison.
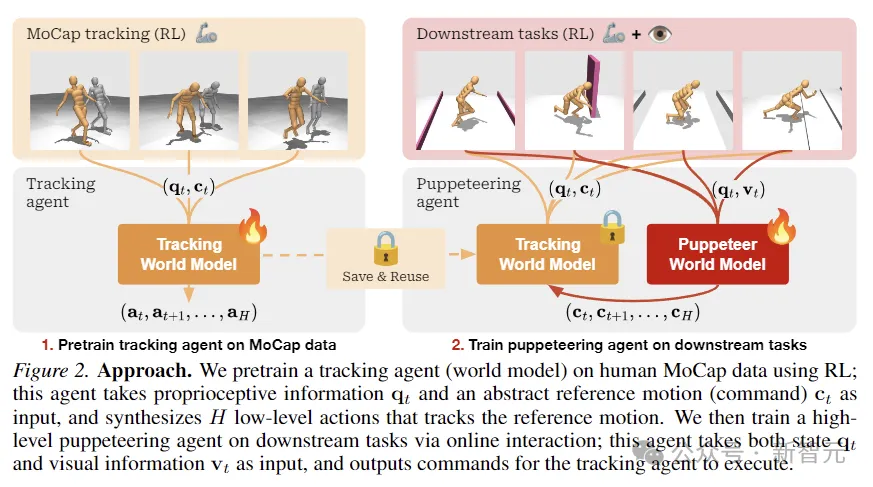
Comme le montre la figure ci-dessus, les chercheurs ont utilisé RL pour pré-entraîner l'agent de suivi sur les données MoCap humaines, qui ont été utilisées pour obtenir des informations proprioceptives et une entrée de mouvement de référence abstraite, et synthétiser des actions de bas niveau pour suivre le mouvement de référence.
Ensuite, grâce à l'interaction en ligne, l'agent marionnette avancé responsable des tâches en aval est formé. La marionnette accepte l'entrée d'informations d'état et visuelles et émet des commandes que l'agent de suivi doit exécuter.
TD-MPC2
TD-MPC2 apprend un modèle mondial latent sans décodeur à partir des interactions environnementales et utilise le modèle appris pour la planification.
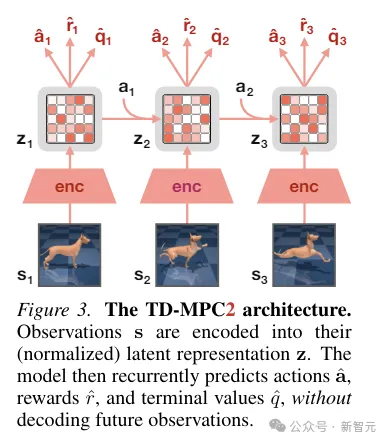
Tous les composants du modèle mondial sont appris de bout en bout en utilisant une combinaison de prédiction d'intégration conjointe, de prédiction de récompense et de perte de différence temporelle sans décoder les observations originales.
Pendant l'inférence, TD-MPC2 suit le cadre Model Predictive Control (MPC), en utilisant Model Predictive Path Integral (MPPI) comme optimiseur sans dérivé (basé sur l'échantillonnage) pour l'optimisation de trajectoire locale.
Afin d'accélérer la planification, TD-MPC2 apprend également à l'avance une stratégie sans modèle pour pré-démarrer le programme d'échantillonnage.
Les deux agents sont algorithmiquement identiques et tous deux sont constitués des 6 composants suivants :
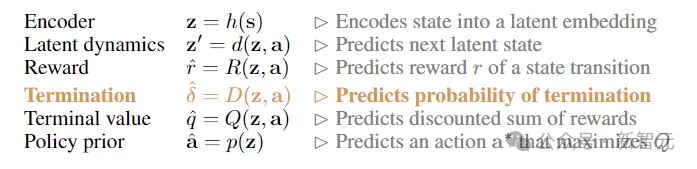
Pour évaluer l'efficacité de la méthode, les chercheurs ont proposé une nouvelle La suite de tâches utilise un 56 simulé -Robot humanoïde à degré de liberté pour le contrôle visuel de tout le corps. Il contient un total de 8 tâches difficiles. Les méthodes utilisées pour la comparaison incluent SAC, DreamerV3 et TD-MPC2.
Les 8 tâches sont présentées dans la figure ci-dessous, dont 5 tâches de mouvement du corps entier liées à la condition visuelle et 3 autres tâches sans entrée visuelle.
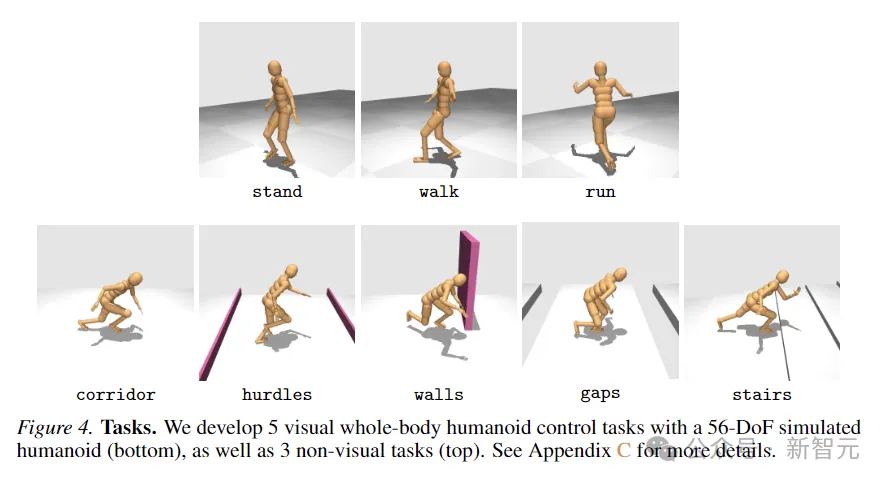
Les quêtes sont conçues avec un haut degré d'aléatoire et incluent courir dans des couloirs, sauter par-dessus des obstacles et des interstices, monter des escaliers et contourner les murs.
Les cinq tâches de contrôle visuel utilisent toutes une fonction de récompense proportionnelle à la vitesse d'avancement linéaire, tandis que les tâches non visuelles récompensent le déplacement dans n'importe quelle direction.
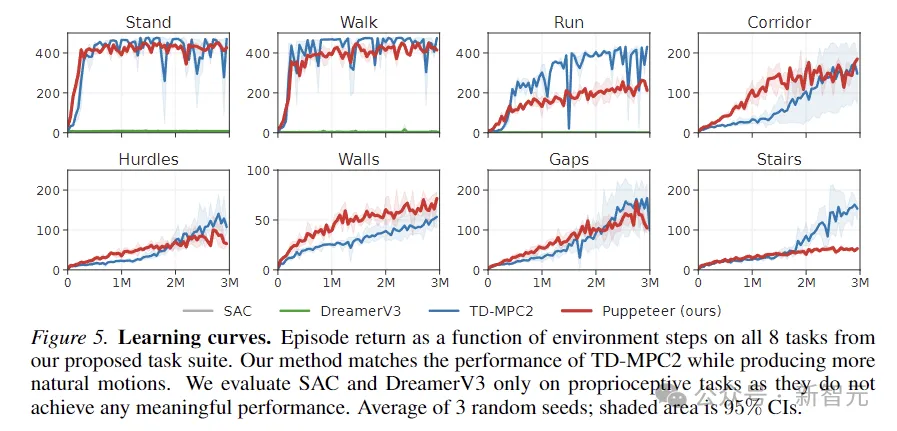
L'image ci-dessus représente la courbe d'apprentissage. Les résultats montrent que SAC et DreamerV3 sont incapables d'atteindre des performances significatives sur ces tâches.
TD-MPC2 fonctionne à égalité avec notre méthode en termes de récompenses, mais produit un comportement non naturel (voir les actions abstraites dans l'image ci-dessous).
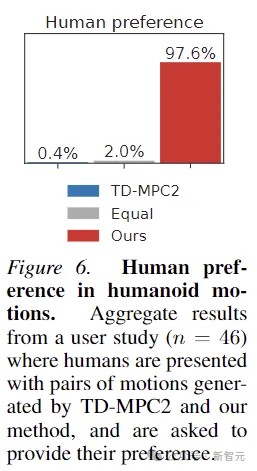
De plus, afin de prouver que les mouvements générés par Puppeteer sont effectivement plus "naturels", cet article a également mené une expérience de préférence humaine. Le test sur 46 participants a montré que les humains aiment généralement le. mouvements générés par cette méthode.
Ce qui précède est le contenu détaillé de. pour plus d'informations, suivez d'autres articles connexes sur le site Web de PHP en chinois!
 Google Earth ne parvient pas à se connecter à la solution serveur
Google Earth ne parvient pas à se connecter à la solution serveur Quelles sont les méthodes d'appel de la réflexion Java
Quelles sont les méthodes d'appel de la réflexion Java Solution pour diviser le tableau de mots en deux pages
Solution pour diviser le tableau de mots en deux pages Comment définir le style de lien en CSS
Comment définir le style de lien en CSS que signifie js
que signifie js Comment vérifier l'historique de téléchargement sur TikTok
Comment vérifier l'historique de téléchargement sur TikTok que signifie l'URL
que signifie l'URL Quel est le système Honor ?
Quel est le système Honor ?





















![[Web front-end] Démarrage rapide de Node.js](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



