


Scalable Maps: Scalable Map Learning for Online Long-Distance Vectorized HD Map Construction
Please click the following link to read the paper: https://arxiv.org/pdf/2310.13378.pdf
Code link: https://github.com/jingy1yu/ScalableMap
The author’s unit is Wuhan University
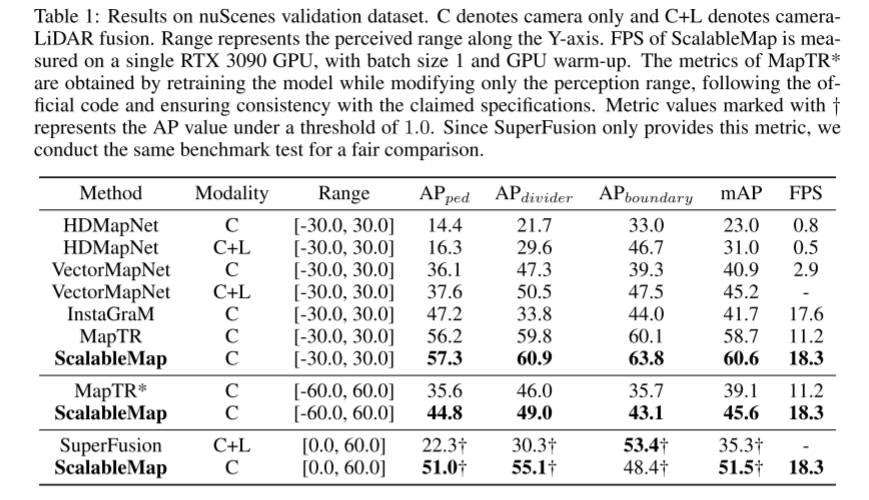
This paper proposes a novel end-to-end process for building online long-range vectorized high-precision (HD) maps using vehicle-mounted camera sensors. Vectorized representations of high-precision maps use polylines and polygons to represent map features, which are widely used by downstream tasks. However, previous solutions designed with reference to dynamic target detection ignored the structural constraints within linear map elements, resulting in performance degradation in long-distance scenes. This article uses the attributes of map features to improve the performance of map construction. This paper extracts more accurate bird's-eye view (BEV) features under the guidance of linear structures, then proposes a hierarchical sparse graph representation to further exploit the scalability of vectorized graph elements, and designs a progressive decoding mechanism based on this representation. Supervision strategy. This article's method ScalableMap shows excellent performance on the nuScenes dataset, especially in long-distance scenes. Compared with the previous state-of-the-art model, it improves 6.5 mAP and achieves 18.3 FPS
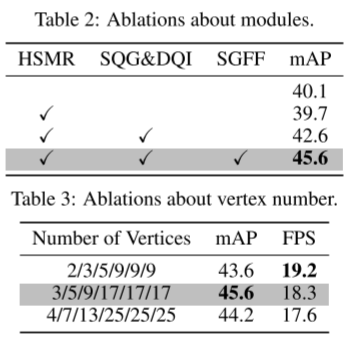
(i) This article proposes ScalableMap, the first end-to-end long-distance vector map construction pipeline. This paper utilizes the structural characteristics of mapping elements to extract more accurate BEV features, proposes HSMR based on scalable vectorized elements, and designs progressive decoders and supervision strategies accordingly. All of this results in superior long-distance map perception.
Through extensive experimental evaluation, this study tested the performance of ScalableMap on the nuScenes dataset [17]. The research method has achieved state-of-the-art results in long-distance high-precision map learning, improving 6.5 mAP over existing multi-modal methods while achieving a speed of 18.3 frames per second
The goal of this article is to leverage the structural properties of vectorized map elements to address the challenge of accurately detecting map elements over longer distances. First, this paper extracts position-aware BEV features and instance-aware BEV features through two branches respectively, and fuses them under the guidance of a linear structure to obtain hybrid BEV features. Next, this paper proposes a hierarchical sparse map representation (HSMR) to abstract map elements in a sparse but accurate manner. Integrating this representation with the cascade decoding layer proposed by DETR [16], this paper designs a progressive decoder that enhances the constraints of structured information by leveraging the scalability of vectorized mapping elements and a progressive supervision strategy to improve inference. accuracy. This article’s solution, ScalableMap, dynamically increases the sampling density of the map to obtain inference results at various scales, allowing this article to obtain more accurate map information faster.
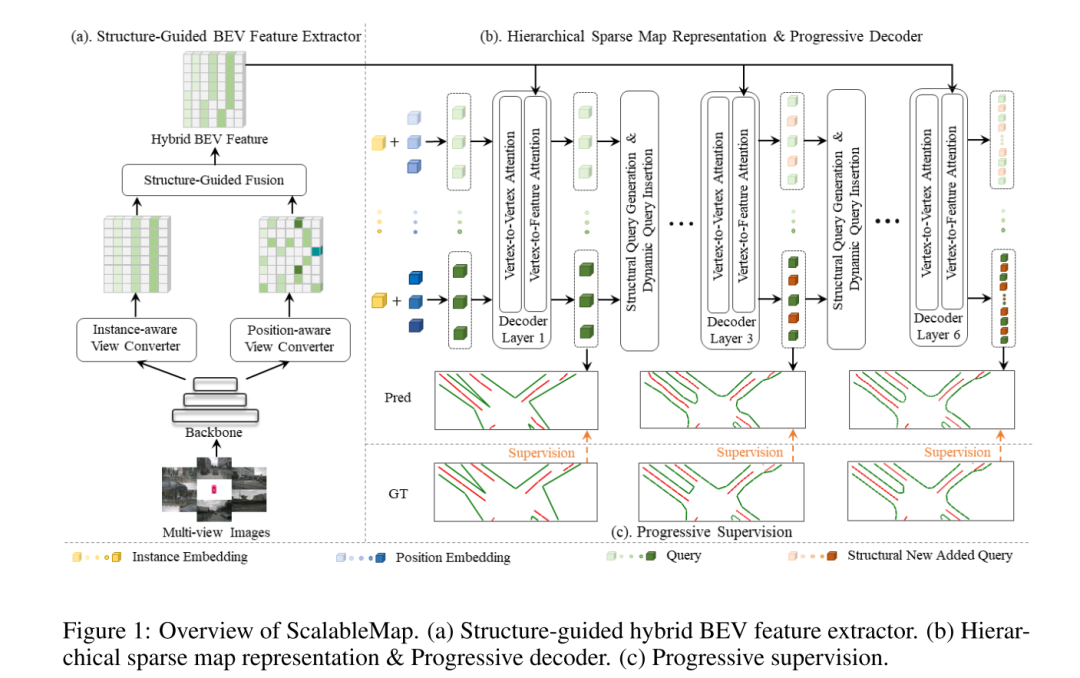
Please refer to the following rewritten content: Figure 1: ScalableMap overview. (a) Structure-guided hybrid BEV feature extractor. (b) Hierarchical sparse map representation and progressive decoder. (c) Progressive Supervision
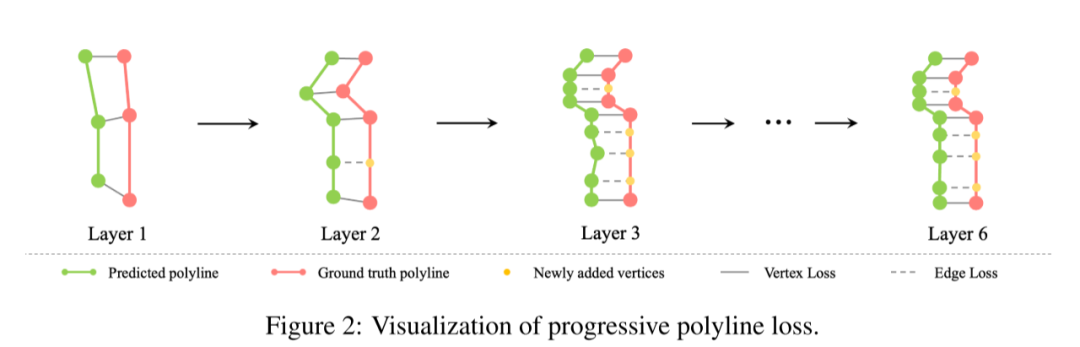
#Figure 2: Visualization of progressive polyline loss.


The content that needs to be rewritten is: Rewrite the content without changing the original meaning. The language to rewrite into is Chinese. The original sentence does not need to appear
The above is the detailed content of ScalableMap: Scalable map learning for online long-range vectorized high-precision map construction. For more information, please follow other related articles on the PHP Chinese website!














![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



