


Human beings have dreamed of developing mobile mechanisms that can adapt to a variety of wild terrains since ancient times.Wheeled mobile platformhas good motion stability and movement efficiency, but is difficult to travel in rugged terrain;legged robothas good terrain adaptability and movement flexibility , but its motion stability and energy efficiency need to be improved.
In order to combine the advantages of wheel movement and leg and foot movement, the wheel-leg compound movement mechanism was born.Common wheel and leg composite mechanisms mainly include special-shaped wheels (such as RHex), spoked wheels (such as Whegs), deformed wheels (such as OmniWheg), wheel legs in series (such as Wheeled-ANYmal), etc., as shown in Figure X.
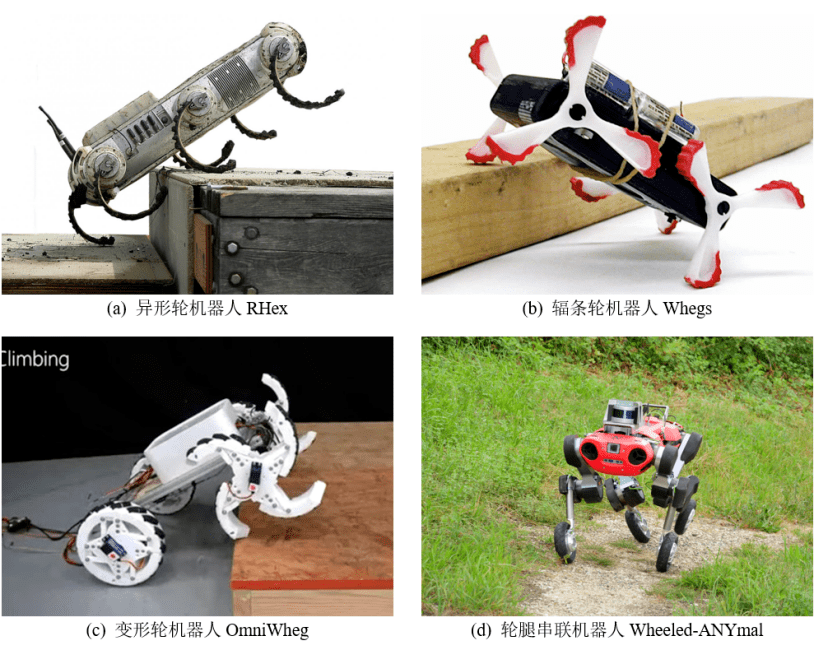
Figure 1 Common wheel-legged composite robot
Recently, the team of Professor Li Yibin of Shandong University, Professor Ma Shugen of Ritsumeikan University, Japan, Professor Liu Jinguo of Shenyang Institute of Automation, Chinese Academy of Sciences, and Associate Researcher Kong Lingyu of Zhijiang Laboratory,developed a new type of wheel-legged composite robot, named For Q-Whex,is shown in Figure 2.
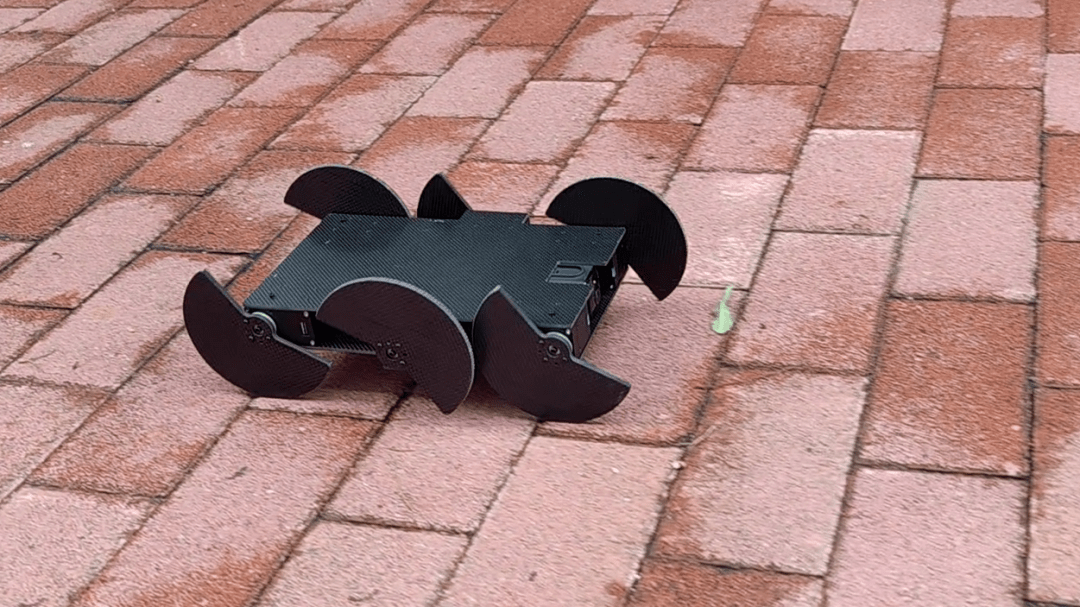
Figure 2 Q-Whex robot
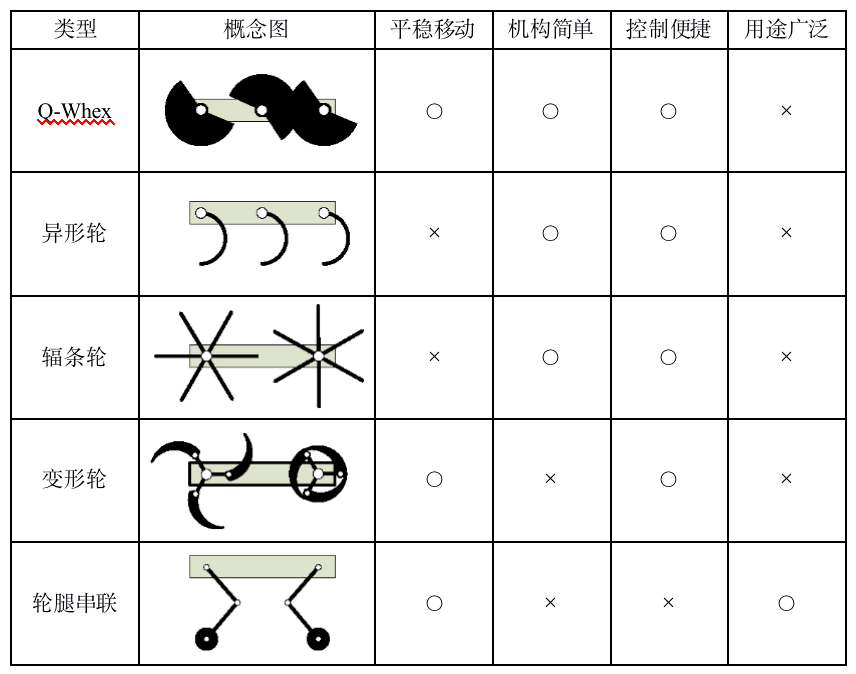
Q-Whex can move smoothly on flat ground like a wheeled mobile platform, and can climb over obstacles higher than its chassis height like a footed robot. Compared with other wheel-legged composite mobile robots,Q-Whex has advantages in terms of motion smoothness, mechanism complexity and control difficulty,as shown in Table 1.
Table 1 Comparison between Q-Whex and other types of wheel-legged composite mobile robots
This work was published in the Journal of Field Robotics under the title "Q-Whex: A simple and highly mobile quasi-wheeled hexapod robot".
▍Simple mechanism and convenient control
The Q-Whex robot shown in the paper is 277.5 mm long, 204.8 mm wide, 39.5 mm high, has a dead weight of 2.4kg, and can reach a forward speed of 0.44 m/s with a load of 2.65 kg. Q-Whex consists of a main body and six isomorphic sector-shaped half-wheel drive systems. The control circuit, IMU, battery, and camera are integrated inside the torso. The drive motor of the wheel leg structure is also placed inside the torso. Each half wheel has a 210° fan-shaped structure, and the output shaft of the motor is connected to the fan center to achieve rotation. When the fan-shaped When the arc edge touches the ground, it is wheeled movement. When the fan-shaped edge touches the ground, the effect of leg-type obstacle surmounting can be achieved.
The production and assembly of Q-Whex is very simple, as shown in Figure 3. The components inside the motor and torso are installed between two carbon fiber plates, and each sector-shaped half wheel is also made of carbon fiber plates.

Figure 3 Q-Whex decomposition diagram
Q-Whex's motion control is also very easy. Each sector-shaped half-wheel rotates continuously. Steering can be achieved by controlling the speed difference between the left sector-shaped half-wheel and the right sector-shaped half-wheel of the robot. By controlling the rotation angle of each sector-shaped half-wheel, The phase difference between them can generate different gaits. Figure 4 shows the four typical gaits of Q-Whex.
Figure 4 Q-Whex typical gait display
▍Wheel and leg combination, climbing and overcoming obstacles
Q-Whex adopts triangular gait and can move smoothly on flat ground like a wheeled mobile platform, as shown in Figure 5.

Figure 5 Q-Whex moves smoothly on flat ground
Q-Whex can also easily handle snow, ice, gravel and other surfaces, as shown in Figure 6.

Figure 6 Q-Whex operates on a variety of surfaces
Using symmetrical gait, you can go up and down 32-degree slopes, as shown in Figure 7.

Figure 7 Q-Whex on a 32-degree slope
Can climb continuous steps, as shown in Figure 8.
Figure 8 Q-Whex climbs continuous steps
Various rugged terrains are not a problem, as shown in Figure 9.
Figure 9 Q-Whex running in rugged terrain
▍Symmetrical configuration, no fear of overturning
Since the structural design of the Q-Whex robot adopts a symmetrical configuration in the three directions of front and back, left and right, and up and down, there is no difference between front and back and front and back during its movement. When the robot accidentally overturns while driving, it can continue moving forward in the "backside up" configuration, thus having excellent insurance and fault tolerance for risks and accidents in complex environment movements. Figure 10 shows that the robot overturned during the climbing process and then completed the climb in a "back-up" posture.
Figure 10 Q-Whex can continue driving after overturning
▍Airborne camera, remote detection
Small camera equipment has been installed on the Q-Whex robot and can transmit the collected images to the remote operator in real time via WiFi or 4G network. Therefore, Q-Whex can perform unmanned detection tasks, as shown in Figure 11.
Figure 11 Q-Whex can use airborne cameras for remote detection
You can also tease the cat remotely, as shown in Figure 12.
Picture 12 Q-Whex and cat
Q-Whex is essentially a new wheel-leg composite mobility concept. Its high maneuverability and strong passability are derived from the continuous rotation and mutual phase coordination of six independently driven sector-shaped half-wheels.This concept can be applied to mobile platforms required for industrial inspections, logistics transportation, field detection, etc. The appropriate configuration and size should be selected according to actual application requirements.The robot does not need to adopt complex perception or control strategies, and its simplicity in structure and control improves the robustness and reliability of the system.
The first author of the paper is Associate Researcher Zhang Guoteng of Shandong University, email:
guoteng@email.sdu.edu.cn.
Paper link:
https://doi.org/10.1002/rob.22186
The above is the detailed content of Top issue published! Professor Li Yibin's team from Shandong University developed a simple and highly maneuverable wheel-legged composite robot. For more information, please follow other related articles on the PHP Chinese website!





























![[Web front-end] Node.js quick start](https://img.php.cn/upload/course/000/000/067/662b5d34ba7c0227.png)



