

Kurs Dazwischenliegend 11331
Kurseinführung:„Selbststudium IT-Netzwerk-Linux-Lastausgleich-Video-Tutorial“ implementiert hauptsächlich den Linux-Lastausgleich durch Ausführen von Skriptvorgängen im Web, LVS und Linux unter Nagin.

Kurs Fortschrittlich 17634
Kurseinführung:„Shang Xuetang MySQL Video Tutorial“ führt Sie in den Prozess von der Installation bis zur Verwendung der MySQL-Datenbank ein und stellt die spezifischen Vorgänge jedes Links im Detail vor.
Kurs Fortschrittlich 11348
Kurseinführung:„Brothers Band Front-End-Beispiel-Display-Video-Tutorial“ stellt jedem Beispiele für HTML5- und CSS3-Technologien vor, damit jeder die Verwendung von HTML5 und CSS3 besser beherrschen kann.
So senden Sie eine eingebettete Nachricht an den Bot und an den Server
2023-08-03 16:05:24 0 1 588
Führen Sie Puppeteer-Aktionen im Laravel-Controller mithilfe von JavaScript-Code aus
2023-08-28 09:40:29 0 1 552
Javascript – WeChat-Applet verbindet sich mit dem lokalen Server
So verbinden Sie das WeChat-Applet mit dem lokalen Server
2017-05-19 10:10:07 0 1 789
2018-07-12 09:50:17 0 4 1311
2017-05-16 13:29:49 0 3 925
Kurseinführung:So entwickeln Sie effiziente Robotersteuerungsprogramme mit C++ Einführung: Mit der kontinuierlichen Weiterentwicklung der künstlichen Intelligenz und der Robotiktechnologie wird die Entwicklung von Robotersteuerungsprogrammen immer wichtiger. In diesem Artikel wird die Verwendung der C++-Sprache zur Entwicklung effizienter Robotersteuerungsprogramme vorgestellt und einige Codebeispiele bereitgestellt. 1. Verstehen Sie die Steuerungsprinzipien von Robotern. Bevor Sie mit der Entwicklung eines Robotersteuerungsprogramms beginnen, müssen Sie zunächst die Steuerungsprinzipien von Robotern verstehen. Die Robotersteuerung umfasst im Allgemeinen die folgenden Aspekte: 1. Sensordatenerfassung: Der Roboter erhält Umgebungsinformationen über verschiedene Sensoren.
2023-08-25 Kommentar 0 2094

Kurseinführung:Wie implementiert man Robotersteuerung und Roboternavigation in C++? Robotersteuerung und -navigation sind sehr wichtige Bestandteile der Robotertechnologie. In der Programmiersprache C++ können wir verschiedene Bibliotheken und Frameworks verwenden, um Robotersteuerung und -navigation zu implementieren. In diesem Artikel wird erläutert, wie Sie mit C++ Codebeispiele zur Steuerung von Robotern und zur Implementierung von Navigationsfunktionen schreiben. 1. Robotersteuerung In C++ können wir serielle Kommunikation oder Netzwerkkommunikation verwenden, um die Robotersteuerung zu realisieren. Das Folgende ist ein Beispielcode, der serielle Kommunikation zur Steuerung der Roboterbewegung verwendet: inkl
2023-08-25 Kommentar 0 1521
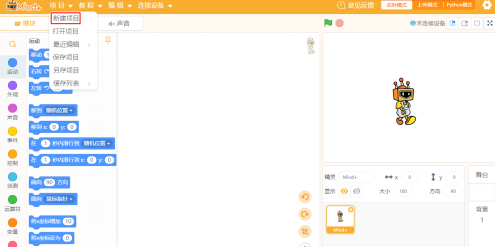
Kurseinführung:Ich glaube, jeder ist mit der Mind+-Programmierung vertraut, aber wissen Sie, wie man mit der Mind+-Programmierung einen Laufroboter baut? unten. Öffnen Sie Mind+, klicken Sie mit der linken Maustaste auf [Projekt]-[Neues Projekt], erstellen Sie einen neuen Elfen und ändern Sie den Elfennamen in [Walking Robot], klicken Sie auf [Ereignis] und ziehen Sie [Little Green Flag] auf die Programmieroberfläche. Klicken Sie auf [Bewegung], verbinden Sie [Nach rechts drehen (15) Grad] unter der [kleinen grünen Flagge], klicken Sie auf [Operator], ziehen Sie [Eine Zufallszahl zwischen (1) und (10) abrufen] in die Programmierschnittstelle und dann Einfügen in [Rechtsdrehung (15) Grad]; klicken Sie auf [Bewegung] und stellen Sie [Rotationsmethode festlegen auf] ein
2024-03-06 Kommentar 0 1065
Kurseinführung:In den letzten Jahren wurde die Robotertechnologie weit verbreitet eingesetzt, was ihre Bedeutung im Bereich Wissenschaft und Technologie zeigt. Auch die Robotersteuerung ist einer der Kernbestandteile der Roboterentwicklung. Durch die Verwendung der Java-Sprache zur Realisierung der Robotersteuerung kann eine schnelle Robotersteuerung erreicht und die Weiterentwicklung von Robotern stark unterstützt werden. Java ist eine Hochsprache, die sich aufgrund ihrer guten Cross-Plattform-Funktionalität, Effizienz und Sicherheit zu einer weit verbreiteten Programmiersprache entwickelt hat. Es bietet auch eine gute Unterstützung bei der Umsetzung der Robotersteuerung. Zunächst müssen Sie die Robotersteuerung verstehen
2023-06-16 Kommentar 0 1914

Kurseinführung:„Robotics Engineering Major“ und „Industrial Robotics Major“ sind im Allgemeinen nicht genau die gleichen Hauptfächer, sie können sich jedoch in gewisser Weise überschneiden. Werfen wir einen Blick auf die Unterschiede zwischen ihnen: 1. Hauptfach Robotertechnik: Dies ist ein breiteres Feld, das verschiedene Arten der Robotik abdeckt, darunter Industrieroboter, Serviceroboter, medizinische Roboter, landwirtschaftliche Roboter usw. Der Kursinhalt des Hauptfachs Robotertechnik kann mechanisches Design, Elektrotechnik, Automatisierungssteuerung, Computerprogrammierung, künstliche Intelligenz und andere Aspekte umfassen, mit dem Ziel, die Fähigkeiten der Studierenden in verschiedenen Roboteranwendungsbereichen zu fördern. 2. Hauptfach Industrierobotik: Dieser Studiengang konzentriert sich mehr auf Robotertechnologie in der Fertigung und in industriellen Anwendungen. Profi für Industrieroboter
2023-09-13 Kommentar 0 1539
